目录
[1. 队列 (Queue)](#1. 队列 (Queue))
[2. 流缓冲区 (Stream Buffer)](#2. 流缓冲区 (Stream Buffer))
[3. 环形缓冲区 (Ring Buffer)](#3. 环形缓冲区 (Ring Buffer))
[4. 核心区别对比表](#4. 核心区别对比表)
[5. 选型指南](#5. 选型指南)
[二、流缓冲区 (Stream Buffer) 使用](#二、流缓冲区 (Stream Buffer) 使用)
[2.1 uart_m.c](#2.1 uart_m.c)
[2.2 uart_m.h](#2.2 uart_m.h)
[2.3 main.c](#2.3 main.c)
[2.4 代码解释](#2.4 代码解释)
[2.5 结果展示](#2.5 结果展示)
[三、环形缓冲区 (Ring Buffer)使用](#三、环形缓冲区 (Ring Buffer)使用)
前言
在 ESP32开发中,队列(Queue) 、流缓冲区(Stream Buffer) 和 环形缓冲区(Ring Buffer) 是三种最常用的任务间通信和数据缓冲机制。
虽然它们都能实现"一个任务/中断发数据,另一个任务收数据",但它们的设计初衷、数据组织方式、并发限制和性能开销有着本质的区别。本章就这三种机制进行一个讲解和使用。
一、三种机制简介
1. 队列 (Queue)
- 来源:FreeRTOS 原生组件。
- 数据组织:固定大小的离散数据项(Item)。创建时必须指定每个 Item 的大小(如 4 字节的
int,或 32 字节的struct)。它像是一列火车,每节车厢大小固定,按先进先出(FIFO)顺序排队。 - 并发支持:支持多读多写(内部有互斥锁保护,线程安全)。
- 内存机制:发生内存拷贝。发送时把数据
memcpy进队列,接收时把数据memcpy出来。 - 典型应用场景:
- 传递传感器离散采样值(如温度、湿度)。
- 传递控制命令、按键事件、状态标志。
- 传递结构体(如果结构体很大,通常传递结构体的指针,但需自行管理指针指向的内存生命周期)。
2. 流缓冲区 (Stream Buffer)
- 来源:FreeRTOS 原生组件(从 v10.0.0 引入)。
- 数据组织:连续的字节流(Byte Stream)。没有"Item"边界的概念,你可以一次写 10 字节,分两次每次读 5 字节。
- 并发支持:严格的单读单写(Single Reader, Single Writer)。为了追求极致的性能,它去掉了内部的互斥锁。这意味着只能有一个任务往里写,一个任务从里读,绝不能多任务并发读写。
- 内存机制:发生内存拷贝。
- 典型应用场景:
- 中断 (ISR) 到任务的数据传递(因为无锁,在中断中执行极快)。
- UART 串口接收不定长的连续数据流。
- ADC 连续采样产生的数据流。
3. 环形缓冲区 (Ring Buffer)
- 来源:ESP-IDF 特有组件(非 FreeRTOS 原生,专为 ESP32 优化)。
- 数据组织:支持变长数据项或纯字节流。它提供了三种类型:
RINGBUF_TYPE_NOSPLIT:Item 必须存放在连续的物理内存中(最常用)。、RINGBUF_TYPE_ALLOWSPLIT:允许 Item 在缓冲区尾部截断并绕回头部(节省空间但读取复杂)。RINGBUF_TYPE_BYTEBUF:纯字节流(类似 Stream Buffer)。
- 并发支持:支持多读多写(内部有锁保护)。
- 内存机制:支持零拷贝(Zero-Copy)。这是它最大的杀手锏!通过
SendAcquire和Receive,你可以直接获取 Ring Buffer 内部内存的指针,直接在里面读写数据,完全省去了memcpy的开销。 - 典型应用场景:
- 音视频流处理(如 I2S 麦克风采集、MP3 解码数据传递)。
- DMA 数据缓冲(让 DMA 直接把数据写到 Ring Buffer 内部)。
- 网络数据包(Wi-Fi/蓝牙)的封包与解包。
- 任何数据量大、频率高,且对 CPU 拷贝开销敏感的场景。
4. 核心区别对比表
| 对比维度 | 队列 (Queue) | 流缓冲区 (Stream Buffer) | 环形缓冲区 (Ring Buffer) |
|---|---|---|---|
| 来源 | FreeRTOS 原生 | FreeRTOS 原生 | ESP-IDF 特有 |
| 数据单元 | 固定大小的 Item | 连续字节流 (无边界) | 变长 Item 或 字节流 |
| 并发限制 | 多读多写 | 单读单写 (极其重要) | 多读多写 |
| 内部锁 | 有 (互斥锁) | 无 (为性能妥协) | 有 (自旋锁/互斥锁) |
| 内存拷贝 | 必须拷贝 (2次) | 必须拷贝 (2次) | 支持零拷贝 (0次) |
| CPU 开销 | 中等 (有锁+拷贝) | 最低 (无锁,但有拷贝) | 较低 (有锁,但无拷贝) |
| ISR 支持 | 支持 (带 FromISR 后缀 API) |
极佳 (无锁,中断耗时极短) | 支持 (带 FromISR 后缀 API) |
| 空间满时处理 | 阻塞等待或丢弃新数据 | 阻塞等待或丢弃新数据 | 支持覆盖旧数据 (可配置) |
5. 选型指南
场景 1:传递控制信号、事件、小结构体
选择 Queue
- 理由:数据量小(几个字节到几十个字节),拷贝开销可以忽略不计。Queue 支持多读多写,API 最丰富,支持阻塞等待,是传递"离散状态"最稳妥的选择。
场景 2:传递连续的字节流(如串口数据),且只有"一发一收"
选择 Stream Buffer
- 理由:没有 Item 大小的限制,非常适合处理不定长的字节流。由于它没有锁,在 UART 接收中断(ISR)中调用
xStreamBufferSendFromISR的速度极快,不会导致中断阻塞。
场景 3:传递大块数据(如音频、图像、大数组),且对性能要求极高
选择 Ring Buffer
- 理由:当你要传递 1KB 甚至更大的数据块时,Queue 和 Stream Buffer 的
memcpy会消耗大量 CPU 时间。Ring Buffer 的零拷贝特性允许你直接操作底层内存,或者直接把 Ring Buffer 的内部指针交给 DMA 控制器,从而实现极高的数据吞吐量。
总结一句话
- Queue 是用来传 "消息/事件" 的(稳妥、通用)。
- Stream Buffer 是用来传 "字节流" 的(轻量、无锁、单发单收)。
- Ring Buffer 是用来传 "大数据块" 的(零拷贝、高性能、ESP32 专属)。
说了以上这么多,大家对这三种机制应该有了一个大致的印象,但是如果没有使用开发过,很难去体会它的特点。下面就分别对流缓冲区和环形缓冲区进行使用示例,因为队列属于基础,相信大家都会使用,这里就不再重复了
二、流缓冲区 (Stream Buffer) 使用
我们用《ESP-IDF+vscode开发ESP32第三讲------UART_vscode 开发esp32-CSDN博客》该文的工程来实现流缓冲区的作用。代码如下:
2.1 uart_m.c
cpp
#include <stdio.h>
#include "uart_m.h"
#include "driver/gpio.h"
#include "driver/uart.h"
#include "freertos//stream_buffer.h"
static const char *TAG = "UART";
QueueHandle_t uart_intr_handle= NULL;
StreamBufferHandle_t uart_stream_buffer = NULL;
void uart_intr_callback(void *arg);
void stream_buffer_info(void *arg);
void uart_init(void)
{
uart_stream_buffer = xStreamBufferCreate(1024, 100);
uart_config_t uart_config = {
.baud_rate = 115200,
.data_bits = UART_DATA_8_BITS,
.parity = UART_PARITY_DISABLE,
.stop_bits = UART_STOP_BITS_1,
.flow_ctrl = UART_HW_FLOWCTRL_DISABLE,
.source_clk = UART_SCLK_DEFAULT,
};
ESP_ERROR_CHECK(uart_driver_install(uart_port, uart_rx_buffer, uart_tx_buffer, 5, &uart_intr_handle, 0));
ESP_ERROR_CHECK(uart_param_config(uart_port, &uart_config));
ESP_ERROR_CHECK(uart_set_pin(uart_port, uart_tx_pin, uart_rx_pin, -1, -1, -1, -1));
ESP_ERROR_CHECK(uart_set_mode(uart_port, UART_MODE_UART));
ESP_LOGI(TAG, uart_is_driver_installed(uart_port)? "UART driver is installed" : "UART driver is not installed");
//中断配置
uart_intr_config_t intr_config = {
.intr_enable_mask = uart_intr,
.rx_timeout_thresh = 20,
.rxfifo_full_thresh = 50,
};
ESP_ERROR_CHECK(uart_intr_config(uart_port, &intr_config));
uart_enable_intr_mask(uart_port, uart_intr);
uart_set_sw_flow_ctrl(uart_port, true, 10, 30);
uart_enable_pattern_det_baud_intr(uart_port, '\n', 1, 10, 0, 0);
xTaskCreate(uart_intr_callback, "uart_intr", 4096, NULL, 5, NULL);
xTaskCreate(stream_buffer_info, "stream_buffer_info", 4096, NULL, 10, NULL);
ESP_LOGI(TAG, "UART初始化成功,波特率为:%d", uart_config.baud_rate);
}
void uart_intr_callback(void *arg)
{
uart_event_t uart_event;
size_t wait_read_size;
int len;
char read_data[1024];
while(1)
{
xQueueReceive(uart_intr_handle, &uart_event, portMAX_DELAY);
switch (uart_event.type)
{
case UART_DATA:
if (uart_event.timeout_flag == false){
ESP_LOGI(TAG, "触发接收FIFO阈值中断, uart rx data size: %d", uart_event.size);
}
else{
ESP_LOGI(TAG, "触发接收超时中断, uart rx data size: %d", uart_event.size);
}
break;
case UART_PATTERN_DET:
ESP_LOGI(TAG, "触发PATTERN_DET中断, uart rx data size: %d", uart_event.size);
break;
default:
ESP_LOGI(TAG, "其他未知事件触发");
break;
}
uart_get_buffered_data_len(uart_port, &wait_read_size);
len = uart_read_bytes(uart_port, read_data, wait_read_size, 1000);
if(len > 0){
read_data[len] = '\0';
ESP_LOGI(TAG, "uart rx data: %s", read_data);
}
xStreamBufferSend(uart_stream_buffer, read_data, len, 0);
}
}
void stream_buffer_info(void *arg)
{
char data[1024];
while(1)
{
ESP_LOGI(TAG, "Stream Buffer中包含的数据大小: %d", xStreamBufferBytesAvailable(uart_stream_buffer));
size_t rx_data_size = xStreamBufferReceive(uart_stream_buffer, data, 30, portMAX_DELAY);
ESP_LOGI(TAG, "Stream Buffer中收到的数据大小: %d", rx_data_size);
rx_data_size = uart_write_bytes(uart_port, data, rx_data_size);
ESP_LOGI(TAG, "uart tx length: %d", rx_data_size);
}
}2.2 uart_m.h
cpp
#ifndef UART_M_H
#define UART_M_H
#include <string.h> // 字符串处理函数
#include "esp_log.h" // ESP32日志函数
#include "FreeRTOS/FreeRTOS.h" // FreeRTOS函数
#include "FreeRTOS/task.h" // FreeRTOS任务管理函数
#include "FreeRTOS/semphr.h" // FreeRTOS信号量管理函数
#include "hal/uart_ll.h"
#define uart_rx_buffer 512
#define uart_tx_buffer 512
#define uart_port UART_NUM_0
#define uart_tx_pin GPIO_NUM_37
#define uart_rx_pin GPIO_NUM_38
#define uart_intr UART_INTR_RXFIFO_TOUT | UART_INTR_RXFIFO_FULL
void uart_init(void);
#endif // UART_M_H2.3 main.c
cpp
#include <stdio.h>
#include "user.h"
#include "uart_m.h"
void app_main(void)
{
CONSOLE_REPL_INIT(); // 初始化控制台REPL环境
uart_init(); // 初始化UART
while(1)
{
vTaskDelay(pdMS_TO_TICKS(1000));
}
}2.4 代码解释
这里面关于uart的API就不解释了,需要了解的话去看第三讲的工程。这里说一下改动的地方。
在初始化函数uart_init里使用函数xStreamBufferCreate创建一个流缓冲区,这里没使用带回调函数,一帮情况下也不需要用回调。创建的缓冲区大小是1024字节,触发阈值是100字节。接着在尾部在创建一个流缓冲区任务stream_buffer_info。
在原先串口任务中调用xStreamBufferSend函数,将接收到的数据发送到流缓冲区。
在任务stream_buffer_info里,先使用xStreamBufferSpacesAvailable查询流缓冲区中空闲的大小来判断是否会溢出,接着使用xStreamBufferReceive来接收数据。如果流缓冲区中的数据大小没有到阈值,就会阻塞等待。
xStreamBufferReceive函数读取机制是,第一次读取时缓冲区内数据没有达到阈值,则会阻塞等待,直到数据达到阈值,接触阻塞并读取设定的字节数,如果接下来再次调用则不会阻塞,直到将流缓冲区所有数据读完,下次读取时继续阻塞,如此周期运行。
所以流缓冲区一旦满足了100个字节的阈值,立马解除阻塞并从缓冲区读取30个字节的数据并回传到上位机。接着不断读取30个(不够30个就读所有剩余),直到流缓冲区数据为0,从新下一次阻塞。
2.5 结果展示
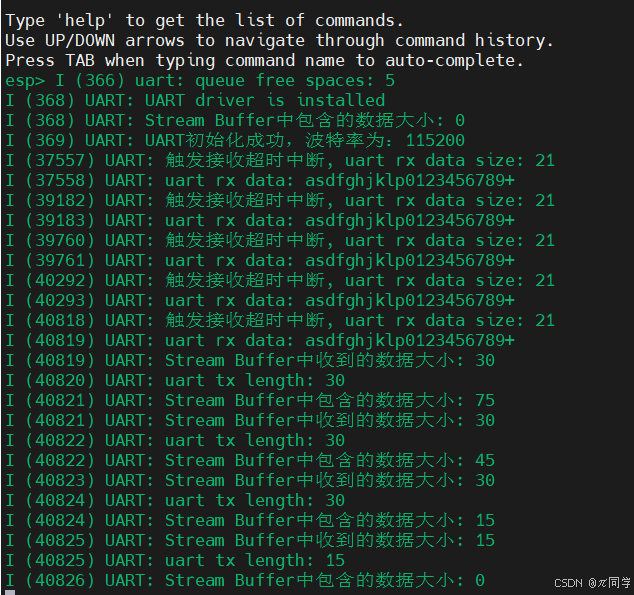
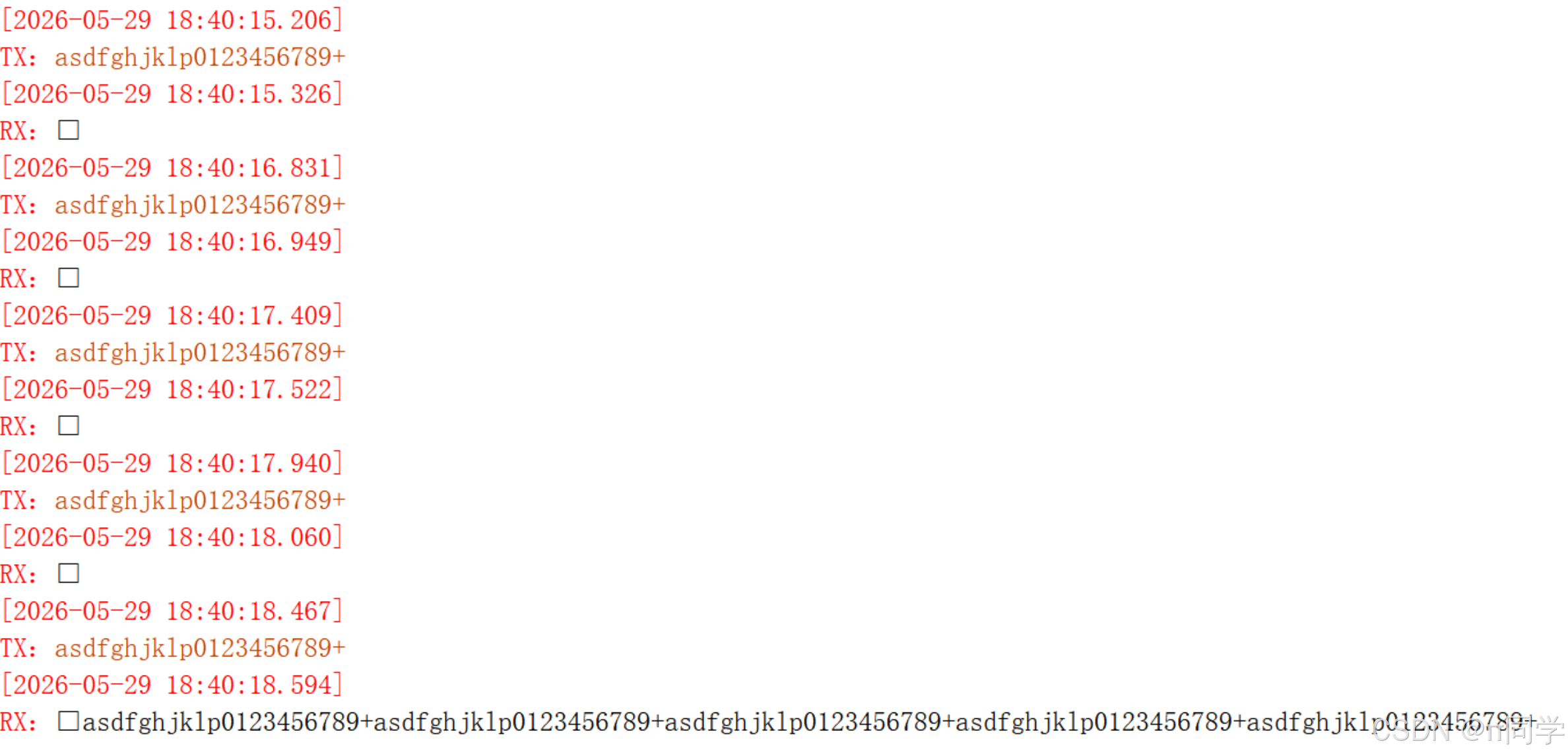
我每次从上位机发送21个字节到设备,第五次发送完流缓冲区数据大小为105字节,大于阈值100字节,解除任务stream_buffer_info阻塞,接着不断循环,每次30个字节从流缓冲区中读出,最后一次剩余15个字节,不满30,则全部读出。此时流缓冲区内为空,则继续阻塞任务stream_buffer_info,等待下一次阈值到来。
三、环形缓冲区 (Ring Buffer)使用
敬请期待