Ardupilot和Gazebo
- 安装Ubuntu 22.04
- 安装Arduilot
-
克隆ArduPilot仓库
bashgit clone https://github.com/ArduPilot/ardupilot.git -
编译
bashcd ardupilot git submodule update --init --recursive Tools/environment_install/install-prereqs-ubuntu.sh -y -
环境配置
bashpwd /home/daniel/ardupilot export PATH=$PATH:<ardupilot path>/Tools/autotest export PATH=/usr/lib/ccache:$PATH . ~/.profile -
编译配置
bash./waf configure --board sitl -
测试
bashsim_vehicle.py -w -v ArduCopter
-
- 安装Gazebo Harmonic
-
添加官方软件源和密钥 在终端中依次执行以下命令,添加Gazebo的官方软件仓库
bashsudo apt-get update sudo apt-get install curl sudo curl https://packages.osrfoundation.org/gazebo.gpg -o /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/pkgs-osrf-archive-keyring.gpg] http://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/gazebo-stable.list > /dev/null -
安装 Gazebo Harmonic 更新软件列表并安装:
bashsudo apt-get update sudo apt-get install gz-harmonic -
验证安装完成后 您可以通过运行 gz sim --version来验证是否成功。
-
-
安装Arduilot_gazebo插件
-
Harmonic (apt)
bashsudo apt update sudo apt install libgz-sim8-dev rapidjson-dev sudo apt install libopencv-dev libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -
克隆仓库并构建:
bashgit clone https://github.com/ArduPilot/ardupilot_gazebo cd ardupilot_gazebo mkdir build && cd build cmake .. -DCMAKE_BUILD_TYPE=RelWithDebInfo make -j4 -
假设您已将存储库克隆到:
$HOME/ardupilot_gazebo:bashecho 'export GZ_SIM_SYSTEM_PLUGIN_PATH=$HOME/ardupilot_gazebo/build:${GZ_SIM_SYSTEM_PLUGIN_PATH}' >> ~/.bashrc echo 'export GZ_SIM_RESOURCE_PATH=$HOME/ardupilot_gazebo/models:$HOME/ardupilot_gazebo/worlds:${GZ_SIM_RESOURCE_PATH}' >> ~/.bashrc
-
- 安装MavProxy
-
安装依赖
bashsudo apt-get install python3-dev python3-opencv python3-wxgtk4.0 python3-pip python3-matplotlib python3-lxml python3-pygame python3 -m pip install PyYAML mavproxy --user echo 'export PATH="$PATH:$HOME/.local/bin"' >> ~/.bashrc -
更新
bashpip3 install mavproxy pymavlink --user --upgrade
-
- 启动gazebo和ardupilot
-
启动gazebo
bashcd ardupilot_gazebo gz sim -v4 -r iris_runway.sdf --render-engine ogre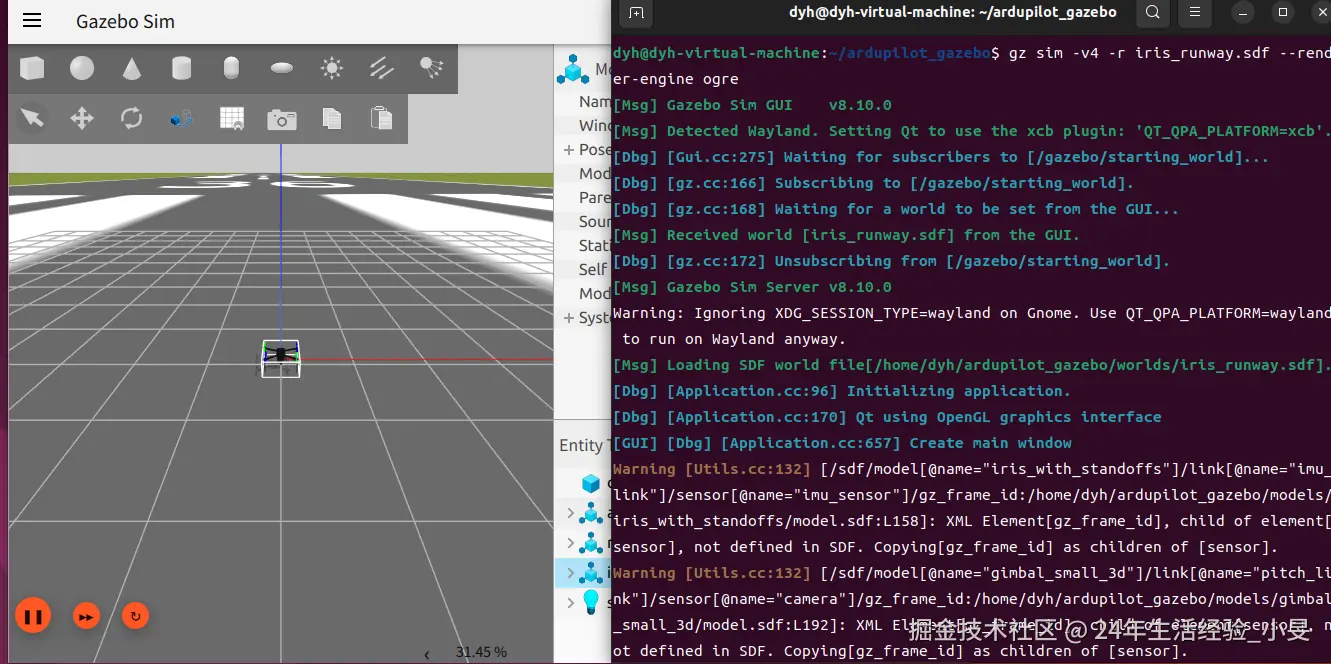
-
启动ardupilot
bashcd ardupilot sim_vehicle.py -v ArduCopter -f gazebo-iris --model JSON --map --console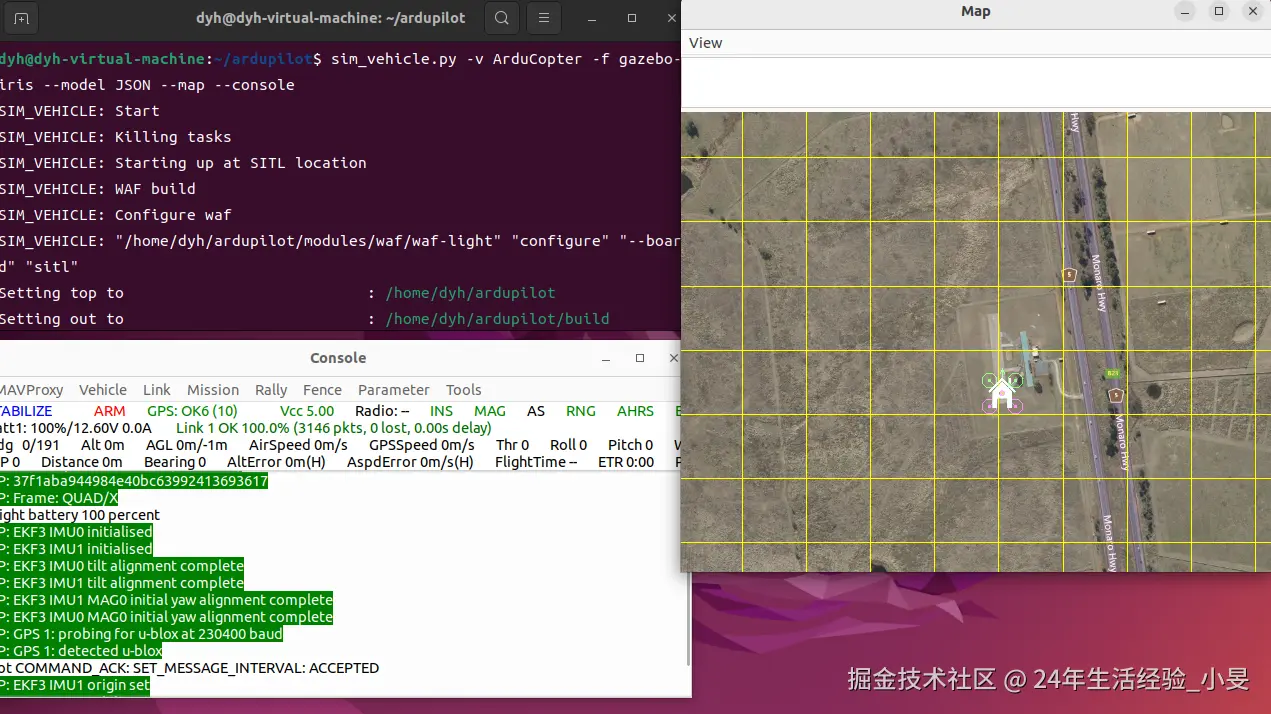
-
等待传感器初始化完成后解锁执行任务
bashmode guided // 切换到引导模式 arm throttle //解锁 takeoff 5 //起飞高度5m position 0 0 3 //位置设置为(0,0,3) m position 100 100 0 //位置设置为(100,100,0) m position 100 -200 0 //位置设置为(100,-200,0) m rtl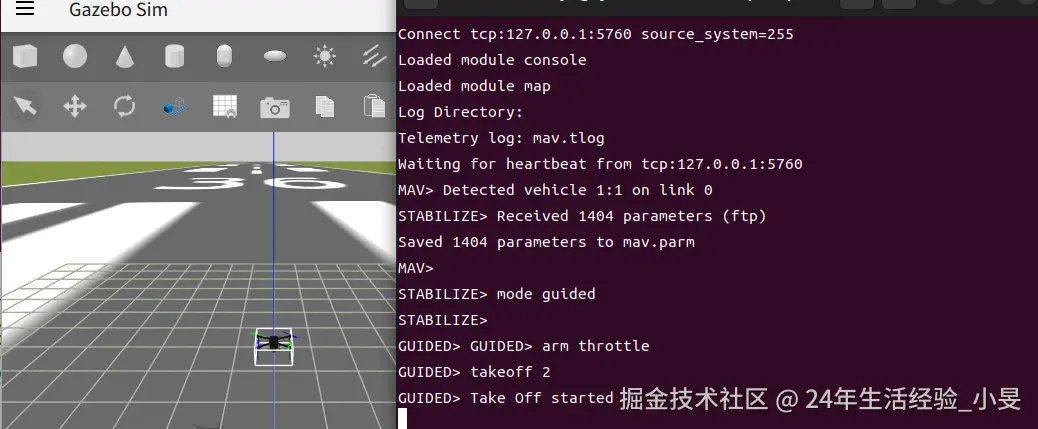
-