《复习参考》
《试卷》
一、名词解释10'(5×2')
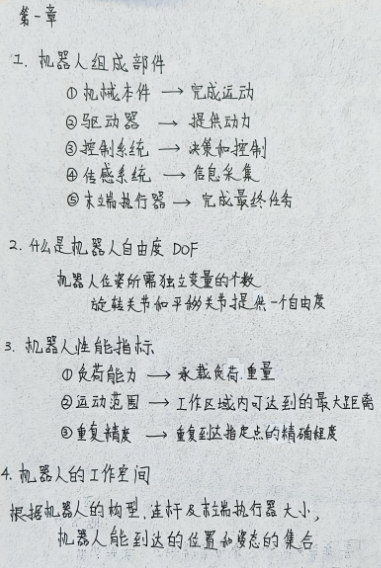
1.什么是机器人自由度DOF
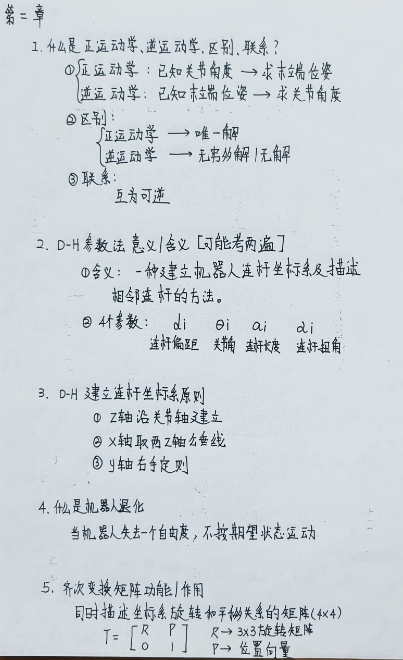
2.齐次变换矩阵功能和作用
3.什么是机器人工作空间?
4.D-H参数是什么/含义?
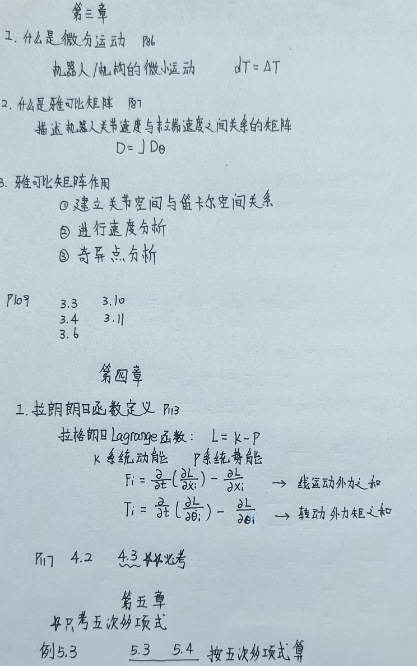
5.雅可比矩阵
二、简答题20'(5×4')
1.机器人组成部件
2.什么是正运动学?什么是逆运动学?它们之间的区别和联系
3.建立D-H参数的原则和DH参数法的意义
4.雅可比矩阵的作用和意义
三、计算题44'(4×11')
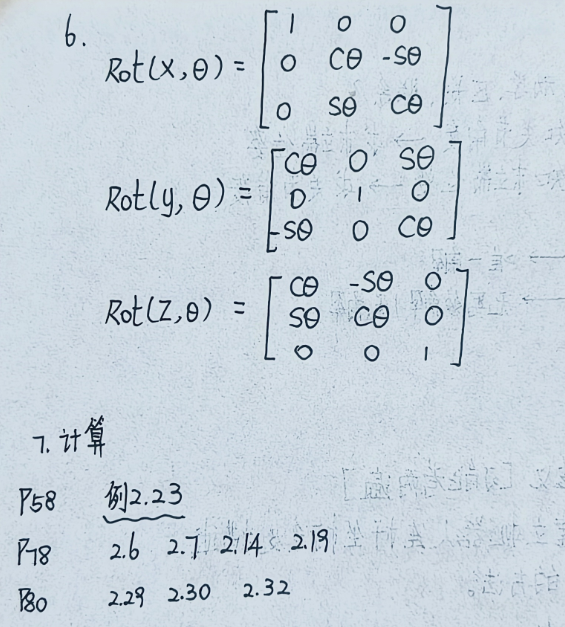
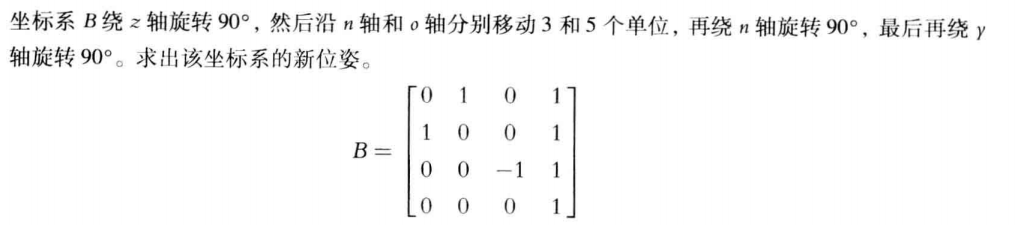
1.(习题2.16)
2.(习题2.29)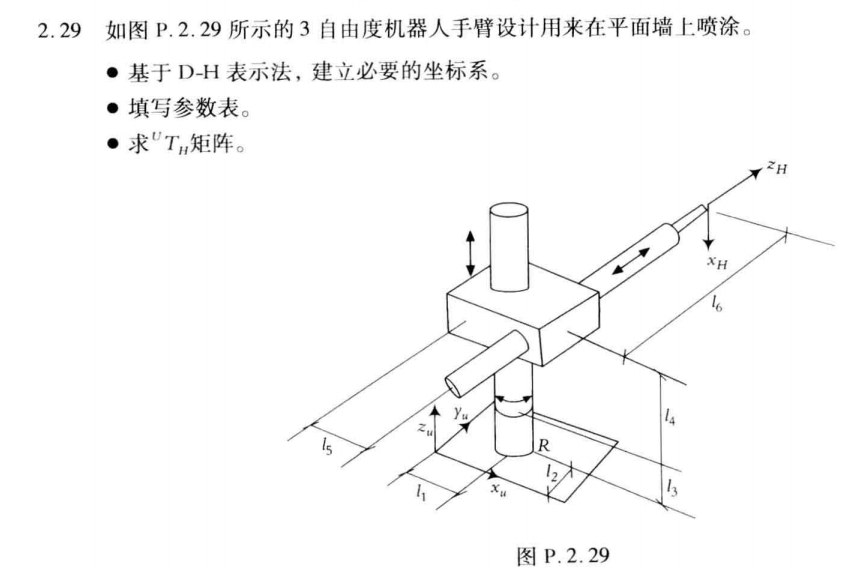
3.(习题3.4)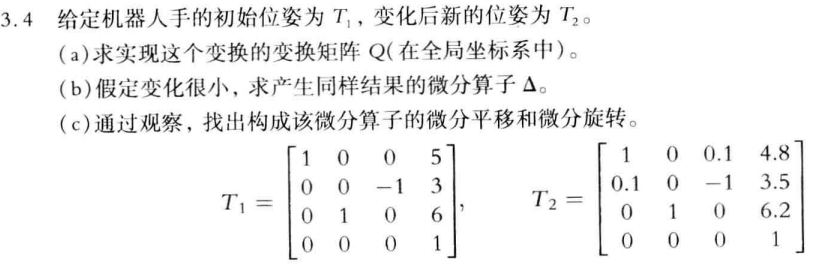
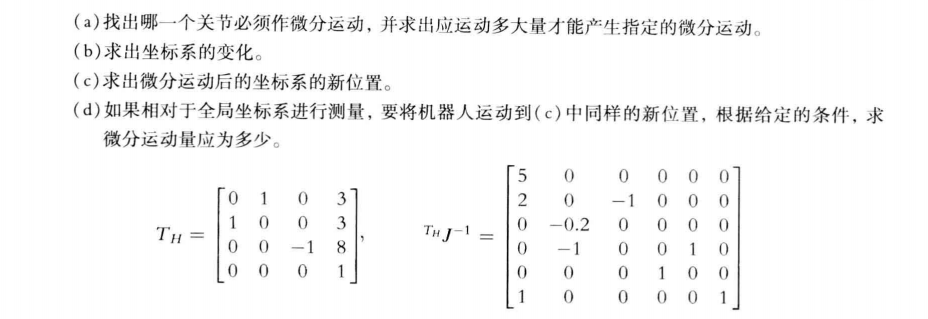
4.(习题3.10)
五、分析题13'
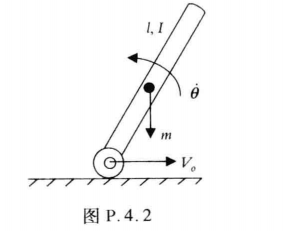
(参考习题4.2)
如P.4.2图所示,连杆固连在滚轮上,滚轮的质量可忽略不计。
(a),计算质心速度
(b),计算连杆的总动能
六、应用题13'
(参考习题5.4)
要求用一个5次多项式来控制机器人在关节空间的运动,求5次多项式的系数,使得该机器人关节用3s由初始角0°运动到终止角75°,机器人的起点和终点速度为0,初始加速度和终点加速度均为10°/²。