一篇面向研究者的完整踩坑笔记与操作教程
🌟 项目简介
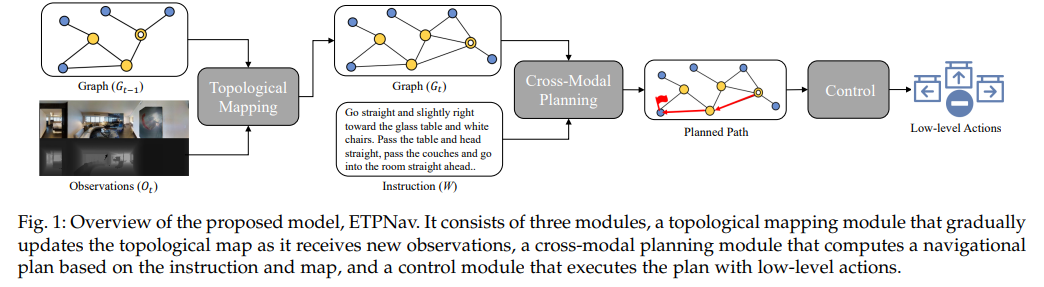
ETPNav(Evolving Topological Planning)是连续环境视觉语言导航(VLN‑CE)领域一个强力的基线模型,由 Dong An 等人提出,论文已于 2024 年被顶级期刊 IEEE TPAMI 收录。
官方开源仓库:MarSaKi/ETPNav
该算法重点突破了传统方法在长距离规划 和避障控制上的局限,核心创新包括:
-
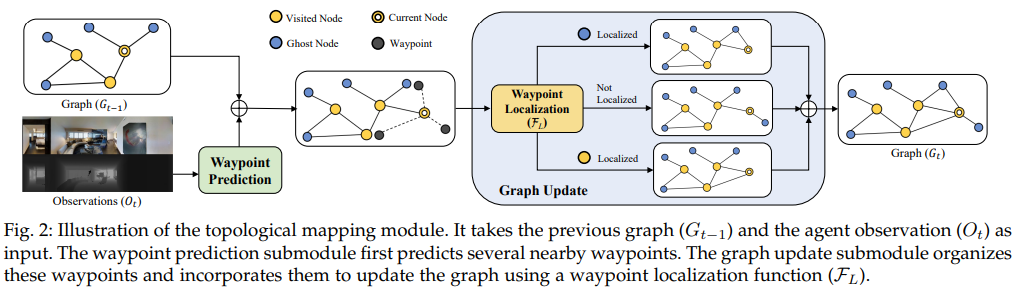
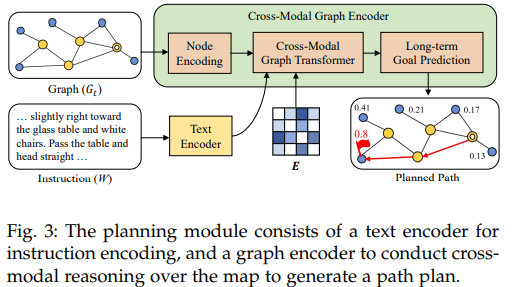
在线拓扑建图与长距离规划:无需预先探索环境,通过自组织沿途预测的路点动态构建拓扑地图,将导航解耦为高层规划与底层控制,利用跨模态 Transformer 规划长距离路径。
-
连续环境下的避障控制:提出基于试错启发式的鲁棒避障控制器(Tryout),有效防止智能体因碰撞陷入死锁。
本文是我在学习和复现 ETPNav 官方项目时整理的详细踩坑笔记,希望能为后续研究者提供一份清晰、闭环的参考教程。
1. 环境配置
本次复现采用 Python 3.8 环境,推荐使用 Conda 管理。
1.1 创建虚拟环境与安装 PyTorch
bash
conda create -n vlnce38 python=3.8
conda activate vlnce38安装 PyTorch 1.9.1 + cu111(两种方式任选):
方式一:直接 pip 安装(国内镜像加速)
bash
pip install torch==1.9.1+cu111 torchvision==0.10.1+cu111 \
-f https://download.pytorch.org/whl/torch_stable.html \
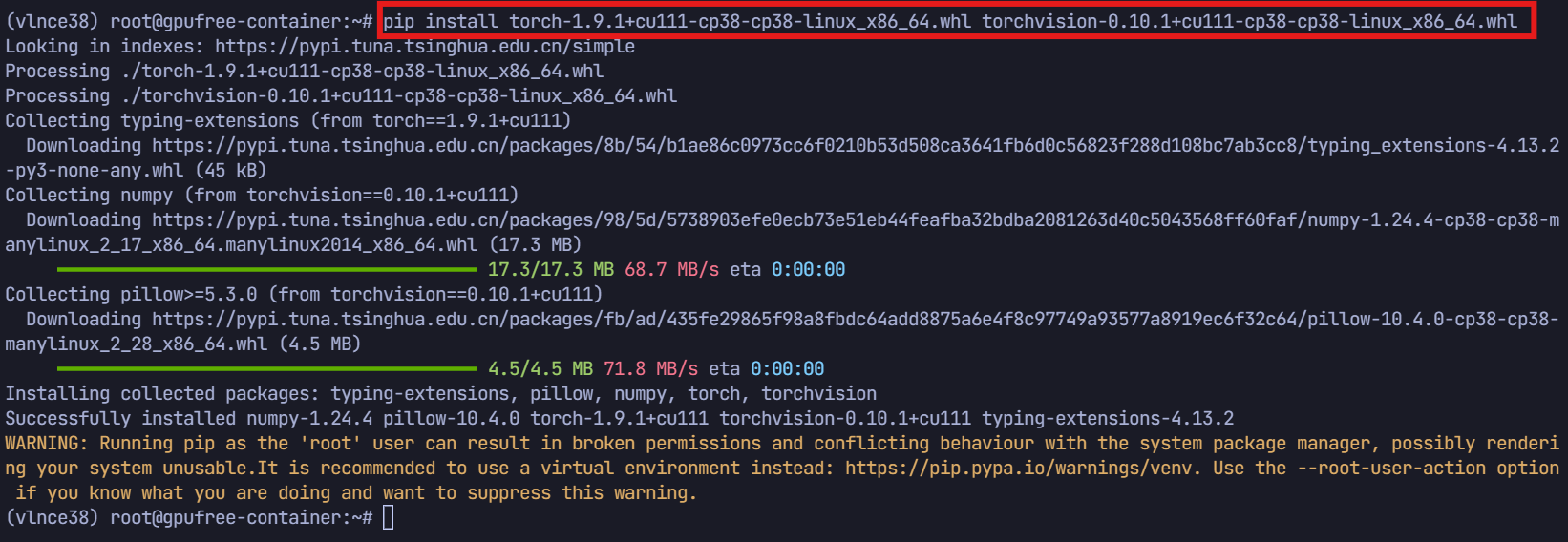
-i https://mirrors.cloud.tencent.com/pypi/simple方式二:下载 whl 文件后本地安装(推荐)
bash
## 下载torch 1.9.1+cu111(Python3.8/Linux x86_64)
wget https://mirrors.aliyun.com/pytorch-wheels/cu111/torch-1.9.1%2Bcu111-cp38-cp38-linux_x86_64.whl
## 下载torchvision 0.10.1+cu111(匹配上面的torch版本)
wget https://mirrors.aliyun.com/pytorch-wheels/cu111/torchvision-0.10.1%2Bcu111-cp38-cp38-linux_x86_64.whl
pip install torch-1.9.1+cu111-cp38-cp38-linux_x86_64.whl torchvision-0.10.1+cu111-cp38-cp38-linux_x86_64.whl
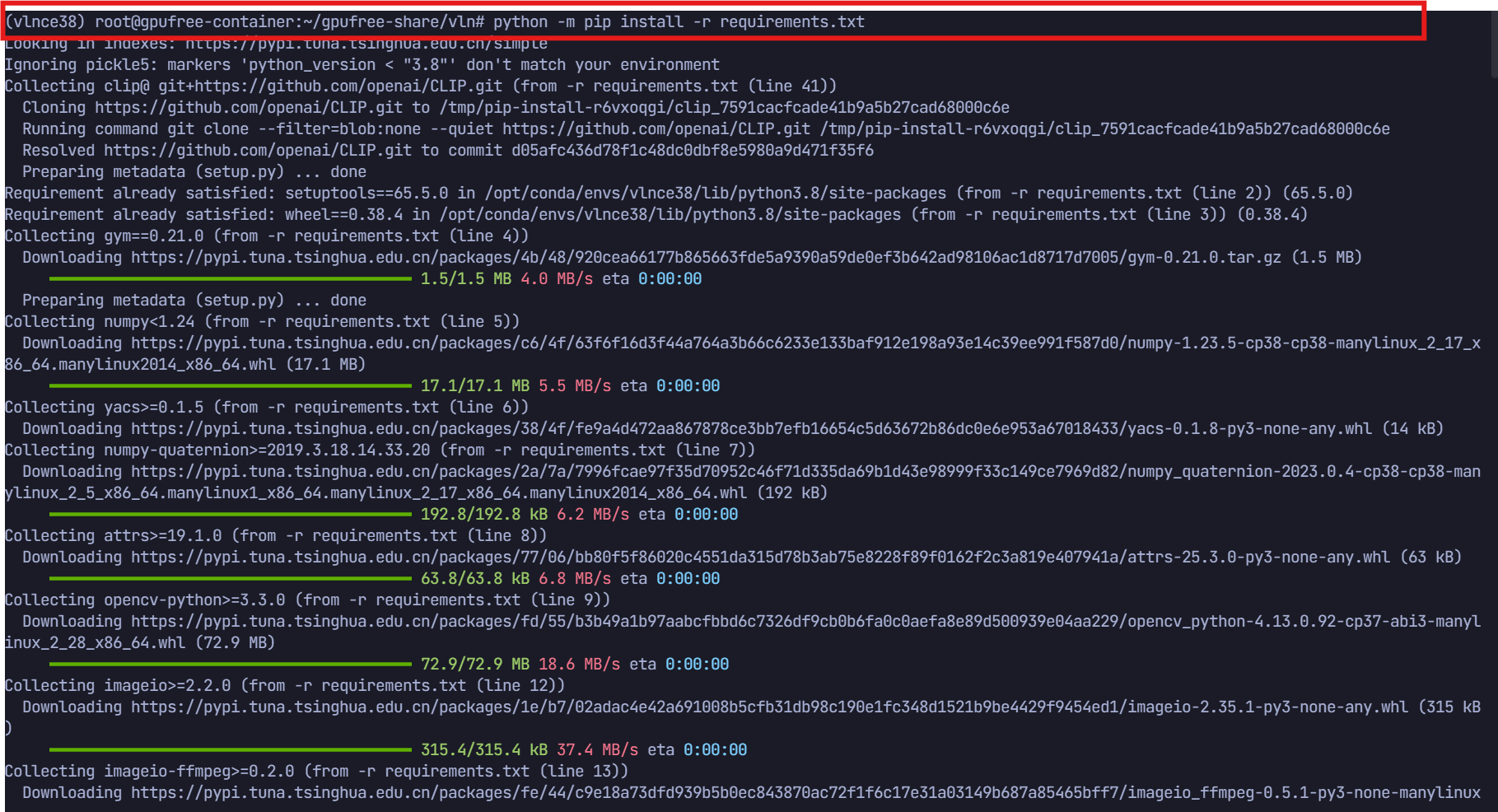
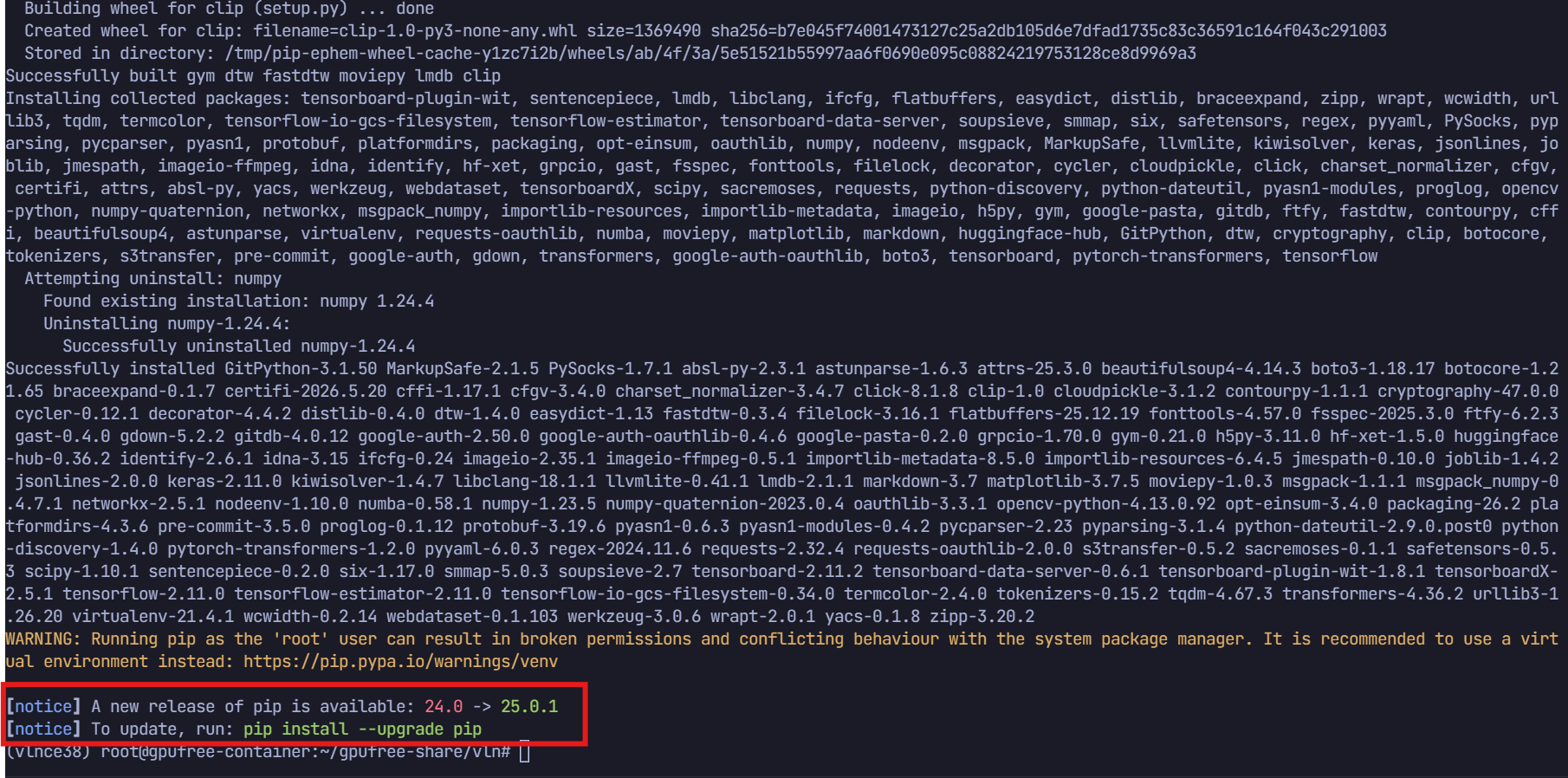
1.2 安装项目依赖
bash
pip install "pip<24.1" setuptools==65.5.0 wheel==0.38.4
pip install -r requirements.txt # requirements.txt 见网盘(提取码: 8je8)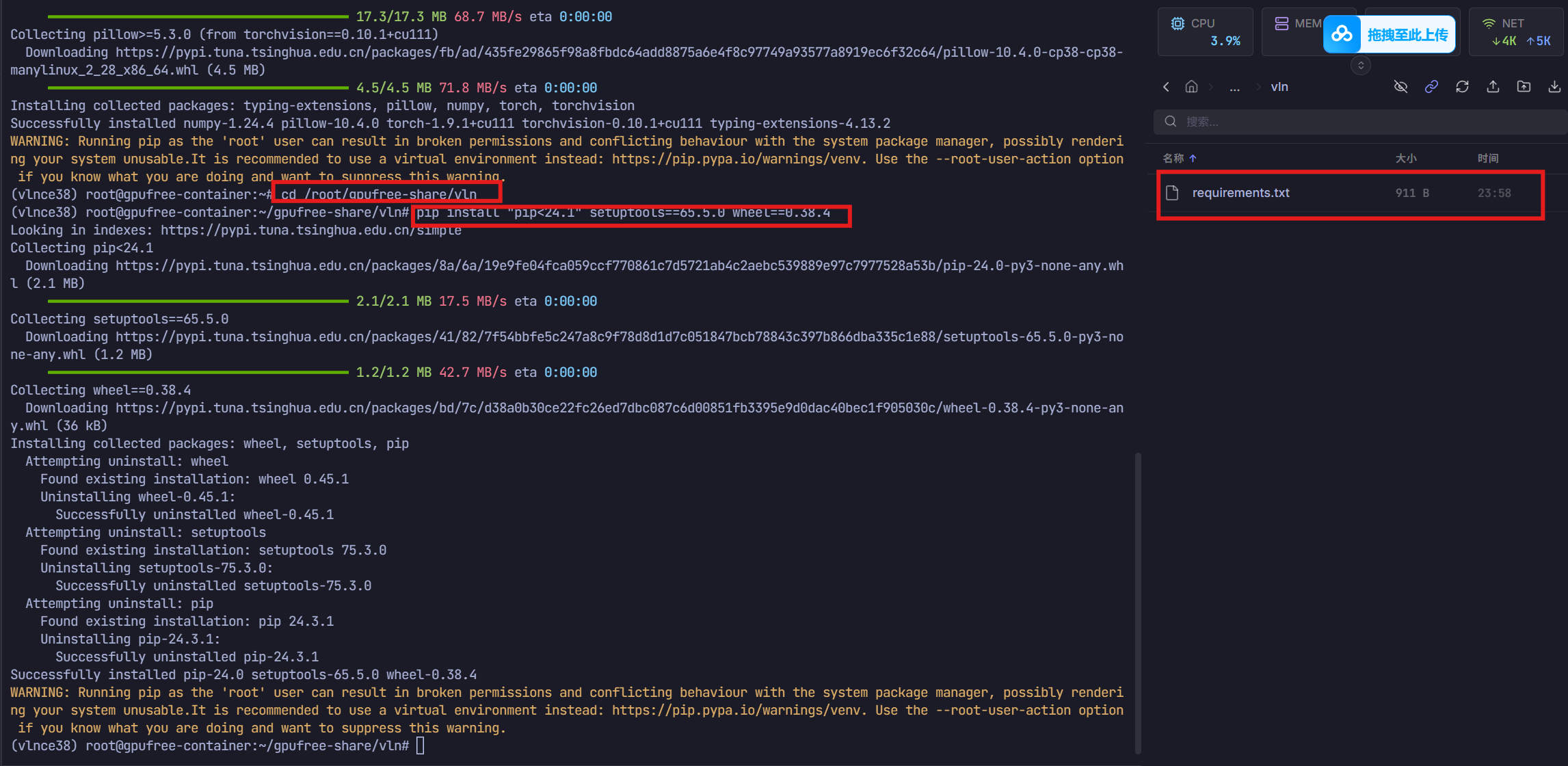
1.3 安装 Habitat 仿真器
bash
# 下载并安装 habitat-sim v0.1.7 无头版(点击链接下载)
conda install habitat-sim-0.1.7-py3.8_headless_linux_856d4b08c1a2632626bf0d205bf46471a99502b7.tar.bz2
# 下载 habitat-lab v0.1.7 并安装
cd habitat-lab-0.1.7
pip install -e .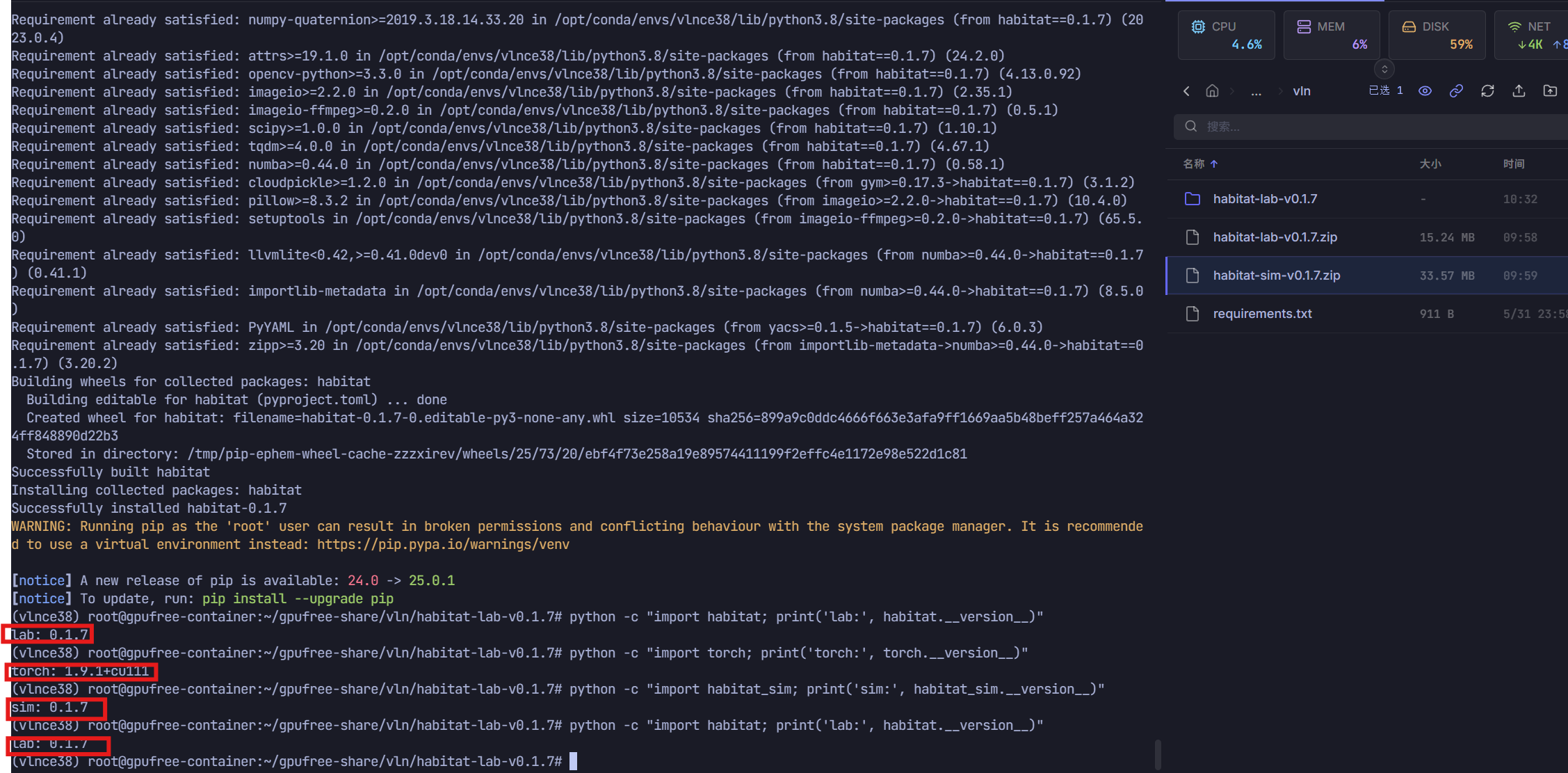
1.4 云服务器环境依赖修复(选做)
在精简版 Linux(如容器、云主机)中运行 Habitat 时,常遇到缺少 OpenGL/EGL 库或 C++ ABI 版本冲突。执行以下命令即可解决:
bash
# 安装图形渲染依赖
apt-get update
apt-get install -y libopengl0 libgl1-mesa-glx libglib2.0-0 libegl1
# 升级 C++ 标准库
apt-get install -y software-properties-common
add-apt-repository ppa:ubuntu-toolchain-r/test -y
apt-get update
apt-get install --only-upgrade libstdc++6 -y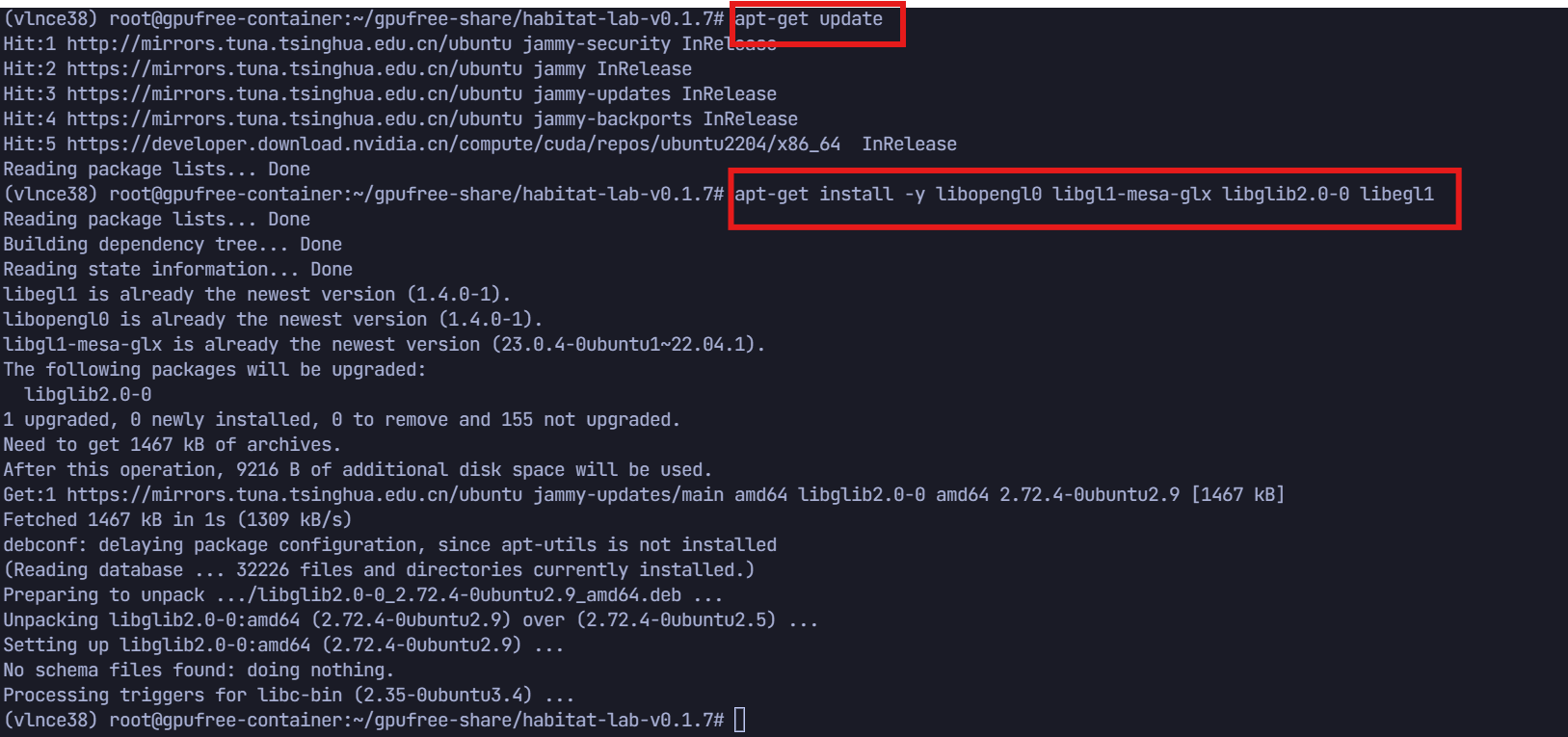
1.5 下载 ETPNav 源码
bash
git clone https://gh-proxy.org/https://github.com/MarSaKi/ETPNav.git2. 数据集下载
2.1 场景数据:Matterport3D(MP3D)
共 90 个场景,数据大小约 22GB。最终存放路径:
data/scene_datasets/mp3d/{scene}/{scene}.glb
-
方式一 :官方脚本(需 Python 2.7)
访问 Matterport3D 官网wangwanMatterport3D: Learning from RGB-D Data in Indoor Environments获取
download_mp.py,运行:
bash
python download_mp.py --task habitat -o data/scene_datasets/mp3d/-
方式二 :网盘下载(提取码: 4kz6)
百度网盘链接:百度网盘 请输入提取码。
2.2 任务数据:R2R 与 RxR
将下载的文件放置于 data/datasets/ 目录下。
| 数据集 | 下载链接 | 存放路径 |
|---|---|---|
| R2R_VLNCE_v1-2_preprocessed | drive.google.com | data/datasets |
| R2R_VLNCE_v1-2_preprocessed_BERTidx | 百度网盘 请输入提取码(提取码: 88yy) | data/datasets |
| RxR | 百度网盘 请输入提取码(提取码: g317) | data/datasets |
2.3 连通图文件
用于可视化导航路径的连通图:
-
存放路径:
data/connectivity_graphs.pkl
3. 模型权重与预训练数据
3.1 编码器与组件权重
| 模型组件 | 下载方式 | 存放路径 |
|---|---|---|
| Waypoint Predictor (R2R‑CE) | drive.google.com | data/wp_pred/check_cwp_bestdist_hfov90 |
| Waypoint Predictor (RxR‑CE) | drive.google.com | data/wp_pred/check_cwp_bestdist_hfov63 |
| BERT 权重 | huggingface.co | bert_config/bert-base-uncased |
| RGB 编码器 (ViT‑B32) | huggingface.co | .cache/clip/ViT-B-32.pt |
| Depth 编码器 (ResNet50) | https://dl.fbaipublicfiles.com/habitat/data/baselines/v1/ddppo/ddppo-models/gibson-2plus-resnet50.pth | data/pretrained_models/ddppo-models/gibson-2plus-resnet50.pth |
3.2 预训练数据
-
R2R 预训练数据:[https://www.dropbox.com/scl/fo/4iaw2ii2z2iupu0yn4tqh/AP2waOdlwdbJE5sUti2557U/R2R?dl=0\&rlkey=88khaszmvhybxleyv0a9bulyn\&subfolder_nav_tracking=1https://www.dropbox.com/scl/fo/4iaw2ii2z2iupu0yn4tqh/AP2waOdlwdbJE5sUti2557U/R2R?dl=0\&rlkey=88khaszmvhybxleyv0a9bulyn\&subfolder_nav_tracking=1](https://www.dropbox.com/scl/fo/4iaw2ii2z2iupu0yn4tqh/AP2waOdlwdbJE5sUti2557U/R2R?dl=0&rlkey=88khaszmvhybxleyv0a9bulyn&subfolder_nav_tracking=1 "https://www.dropbox.com/scl/fo/4iaw2ii2z2iupu0yn4tqh/AP2waOdlwdbJE5sUti2557U/R2R?dl=0&rlkey=88khaszmvhybxleyv0a9bulyn&subfolder_nav_tracking=1") → 存至
pretrain_src/datasets/R2R -
预计算视觉特征:[https://drive.google.com/file/d/1D3Gd9jqRfF-NjlxDAQG_qwxTIakZlrWd/viewhttps://drive.google.com/file/d/1D3Gd9jqRfF-NjlxDAQG_qwxTIakZlrWd/view](https://drive.google.com/file/d/1D3Gd9jqRfF-NjlxDAQG_qwxTIakZlrWd/view "https://drive.google.com/file/d/1D3Gd9jqRfF-NjlxDAQG_qwxTIakZlrWd/view") → 存至
pretrain_src/datasets/img_features -
LXMERT 预训练权重:[https://nlp.cs.unc.edu/data/model_LXRT.pthhttps://nlp.cs.unc.edu/data/model_LXRT.pth](https://nlp.cs.unc.edu/data/model_LXRT.pth "https://nlp.cs.unc.edu/data/model_LXRT.pth") → 存至
pretrain_src/datasets/pretrained/LXMERT
3.3 最终预训练权重(跳过预训练直接微调)
下载链接:[百度网盘 请输入提取码](https://pan.baidu.com/s/1oTmRkuj6syTmI6kE78k0JQ "百度网盘 请输入提取码") 提取码: vfsh
存放路径:pretrained/ETP/model_step_82500.pt
3.4 完整文件夹结构
最终 ETPNav 根目录应包含以下关键内容:
ETPNav/ ├── bert_config/bert-base-uncased/ ├── data/ │ ├── datasets/{R2R_VLNCE_*, RxR_VLNCE_*} │ ├── scene_datasets/mp3d/ │ ├── wp_pred/ │ ├── ddppo-models/gibson-2plus-resnet50.pth │ └── connectivity_graphs.pkl ├── pretrain_src/ │ ├── datasets/{R2R, pretrained/LXMERT} │ └── img_features/ ├── pretrained/ETP/model_step_82500.pt ├── run_r2r/ ├── habitat_extensions/ ├── vlnce_baselines/ └── run.py
4. 代码运行
4.1 预训练(可跳过)
如果已经下载了官方预训练权重(model_step_82500.pt),可以直接跳到微调。
-
修改 BERT 权重为本地路径(避免无法连接外网)
-
按硬件条件调整 GPU 数量(如
CUDA_VISIBLE_DEVICES=0) -
启动预训练:
bashCUDA_VISIBLE_DEVICES=0 bash pretrain_src/run_pt/run_r2r.bash 233训练日志保存在
pretrained/r2r_ce/mlm.sap_habitat_depth/logs/log.txt,可根据测评指标选择最好权重。
4.2 微调(Finetuning)
以单张 RTX 4090 为例,微调约需 1.5 天。
-
修改脚本中的预训练权重路径为
pretrained/ETP/model_step_82500.pt -
按需调整 GPU 数量
-
启动训练:
bashCUDA_VISIBLE_DEVICES=0 bash run_r2r/main.bash train 2333
可选:屏蔽 TensorFlow 警告
bash
export TF_ENABLE_ONEDNN_OPTS=0
export TF_CPP_MIN_LOG_LEVEL=24.3 测试与评估
评估模式:
bash
CUDA_VISIBLE_DEVICES=0 bash run_r2r/main.bash eval 2333运行后输出各项指标(TL, NE, SR, SPL 等)。
可视化 (可选):
在配置中将视频保存模式改为 disk,评估后导航视频会保存在 data/logs/video/release_r2r/*。
推理模式:
bash
CUDA_VISIBLE_DEVICES=0 bash run_r2r/main.bash inference 23335. 常见问题与踩坑提示
| 问题现象 | 解决方案 |
|---|---|
ImportError: libEGL.so.1 等 |
执行 1.4 节的系统依赖安装 |
CXXABI_1.3.13 not found |
升级 libstdc++6(同上) |
| PyTorch 版本冲突 | 必须使用 1.9.1+cu111,高版本可能导致 habitat 不兼容 |
| 数据集路径错误 | 严格按照 2.1--2.3 的存放路径放置文件 |
| 预训练权重下载慢 | 使用百度网盘或代理,或直接使用作者提供的微调权重 |
6. 参考与致谢
本复现教程主要参考以下开源项目,感谢原作者的贡献:
-
ETPNav 官方仓库 ------ 核心复现目标
-
VLN-CE 官方框架 ------ 连续环境导航基础设施与评测标准
-
Discrete-Continuous-VLN ------ 预训练与路点预测模块的重要参考
-
AI通识课:AI+具身智能-课程详情 | Datawhale------开源社区精品视频指导
希望这篇指南能帮助你顺利复现 ETPNav,并在连续环境视觉语言导航的研究中更进一步。如有问题,欢迎交流讨论。