一. 相机型号说明
| 型号 | MV-CL042-91GC |
| 名称 | 4k网口线阵,彩色 |
| 传感器类型 | CMOS |
| 像元尺寸 | 7 μm |
| 分辨率 | 4096 × 2 |
| 最大行频 | 基础行频:28 kHz@Bayer RG 8/Bayer RBGG 8/Mono 8、14 kHz@Bayer RG 10/12/Mono 10/12、9 kHz@RGB 8/BGR 8 HB峰值行频:80 kHz@Bayer RBGG 8、40 kHz@Bayer RG 8/RGB 8 |
| 动态范围 | 65.6 dB |
| 信噪比 | 40 dB |
| 增益 | 支持1.0×、1.4×、1.6×、2.4×、3.2× |
| 曝光时间 | 5 μs~10 ms |
| 快门模式 | 支持自动曝光、手动曝光、一键曝光、脉冲控制曝光 |
| 黑白/彩色 | 彩色 |
| 像素格式 | Mono 8/10/12 Bayer RG 8/10/12 RGB 8,BGR 8 Bayer RBGG 8 |
| Binning | 支持1 × 1,1 × 2,1 × 4,2 × 1,2 × 2,2 × 4,4 × 1,4 × 2,4 × 4 |
| 镜像 | 支持水平镜像 |
| 触发模式 | 外触发,内触发 |
| 外触发模式 | 行触发,帧触发,行+帧触发 |
| 数据接口 | Gigabit Ethernet(1000Mbit/s)兼容Fast Ethernet(100Mbit/s) |
| 数字I/O | 12-pin P10接头提供供电和I/O:4路可配置输入输出(Line 0/1/3/4),支持单端/差分 |
| 供电 | 12 ~ 24 VDC,支持PoE供电 |
| 典型功耗 | 6.6 W@12 VDC |
| 镜头接口 | M42*1.0,法兰后焦12 mm;可通过转接环转接至F口、C口及其他螺纹口镜头 |
| 外形尺寸 | 62 mm × 62 mm × 41 mm |
| 重量 | 约280 g |
| IP防护等级 | IP40(正确安装镜头以及线缆的情况下) |
| 温度 | 工作温度-2055°C,储藏温度-3080°C |
| 湿度 | 5%~90%RH无冷凝 |
| 软件 | MVS或第三方支持GigE Vision协议软件 |
| 操作系统 | Windows XP/7/10/11 32/64bits,Linux 32/64bits以及MacOS 64bits |
| 协议/标准 | GigE Vision V2.0,GenICam |
| 认证 | CE,RoHS,KC |
二. 线扫相机各个线含义
-
相机电源线

-
相机适配器,带横线的为负极
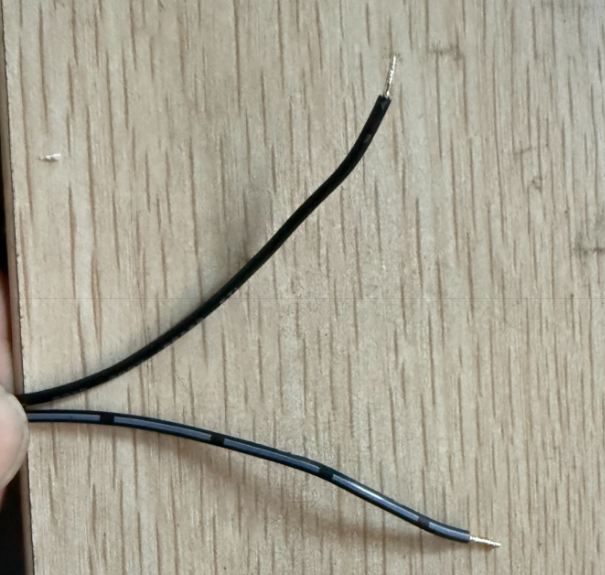
-
根据以上接线如下:
| 线扫相机 | 说明 | 接线 |
|---|---|---|
| 黑线和灰线 | 电源地线 | 适配器带横线的线 |
| 红线和紫线 | 电源12v-24v供电 | 适配器不带横线的线 |
| 白蓝线 | 编码器A+ | 欧姆龙编码器黑线(A+) |
| 白绿线 | 编码器A- | 欧姆龙编码器黑红线(A-) |
| 蓝线 | 编码器B+ | 欧姆龙编码器白线(B+) |
| 绿线 | 编码器B- | 欧姆龙编码器白红线(😎 |
三. 相机设置编码器触发
-
相机触发频率计算
-
假设相机当前的视野宽度为1000mm,宽度方向的图像像素个数为2048,则每个像素的实际宽度方向为10002048=0.488mm/pixels≈0.5mm/pixels\frac{1000}{2048}=0.488mm/pixels\approx0.5mm/pixels20481000=0.488mm/pixels≈0.5mm/pixels
-
假设编码器为每圈生成300个脉冲信号,一圈的行进距离由编码器带轮决定(300mm),相机接收到每个信号后,会对信号进行4倍频(AB项),即编码器发送一个信号,相机内部转换为4个信号,则相机的每个信号的实际行进距离为3001200=0.25mm\frac{300}{1200}=0.25mm1200300=0.25mm
-
为保证图像的每个像素的长宽比为1:1,则相机需要0.50.25=2\frac{0.5}{0.25}=20.250.5=2个信号触发一行图像采集。则设定相机的预除器为2。
-
-
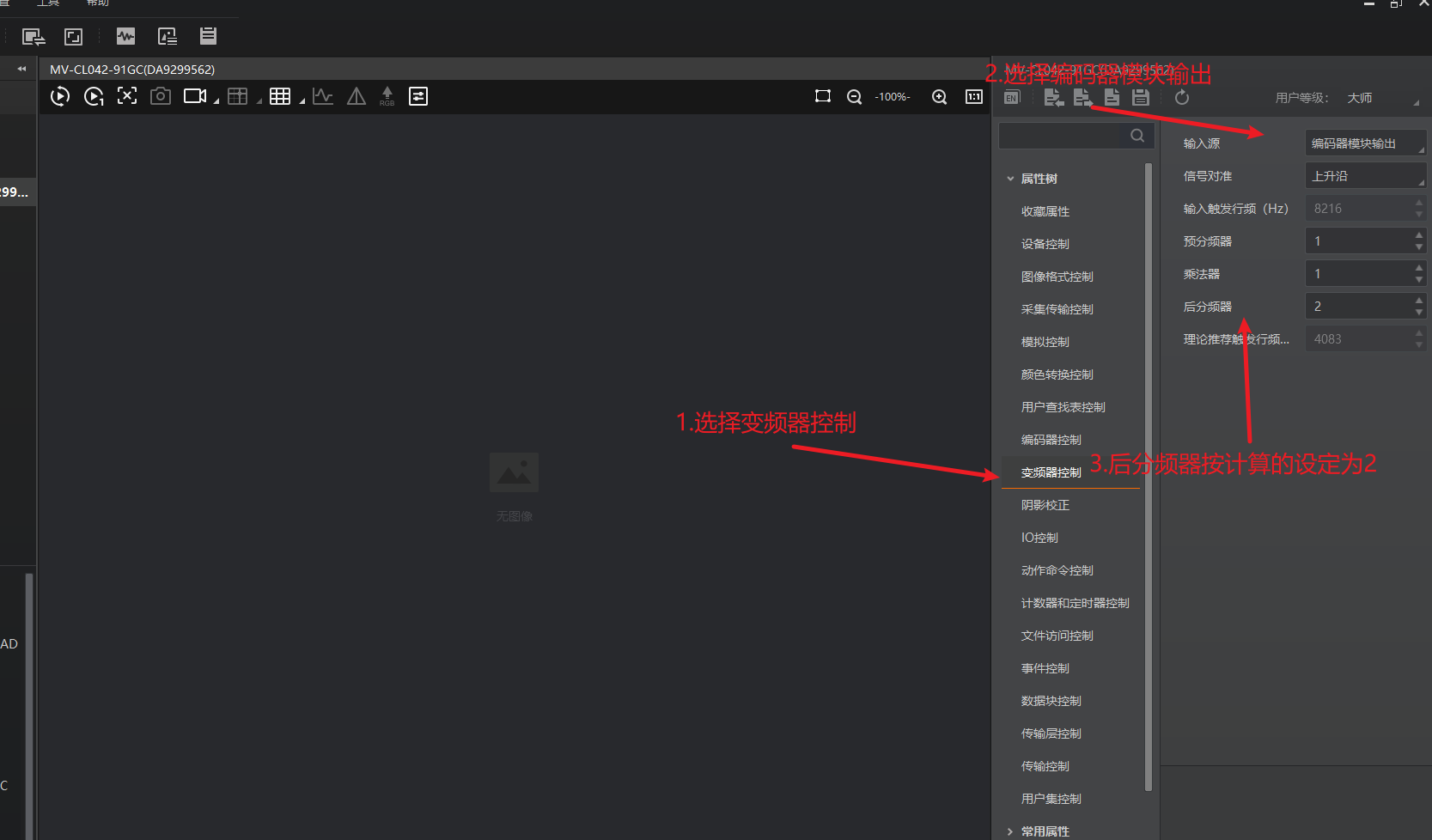
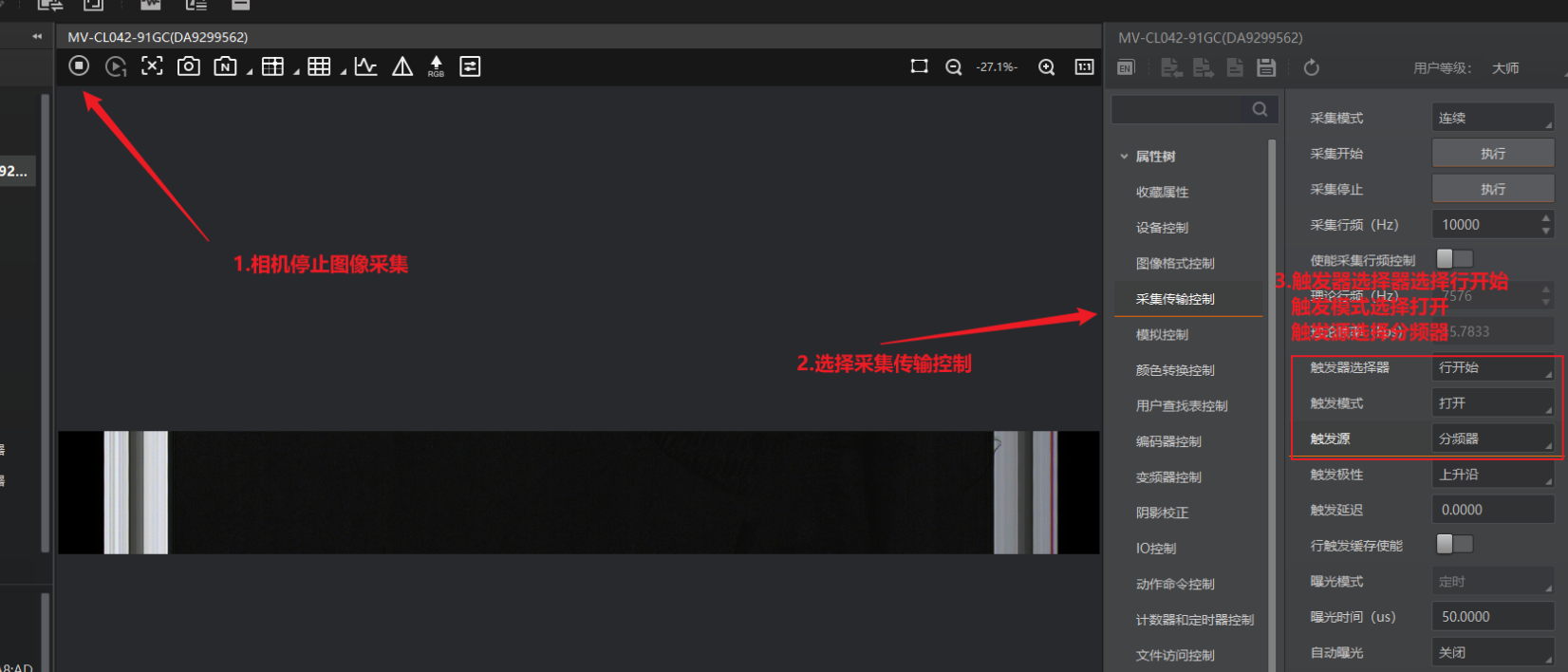
相机触发模式设定
-
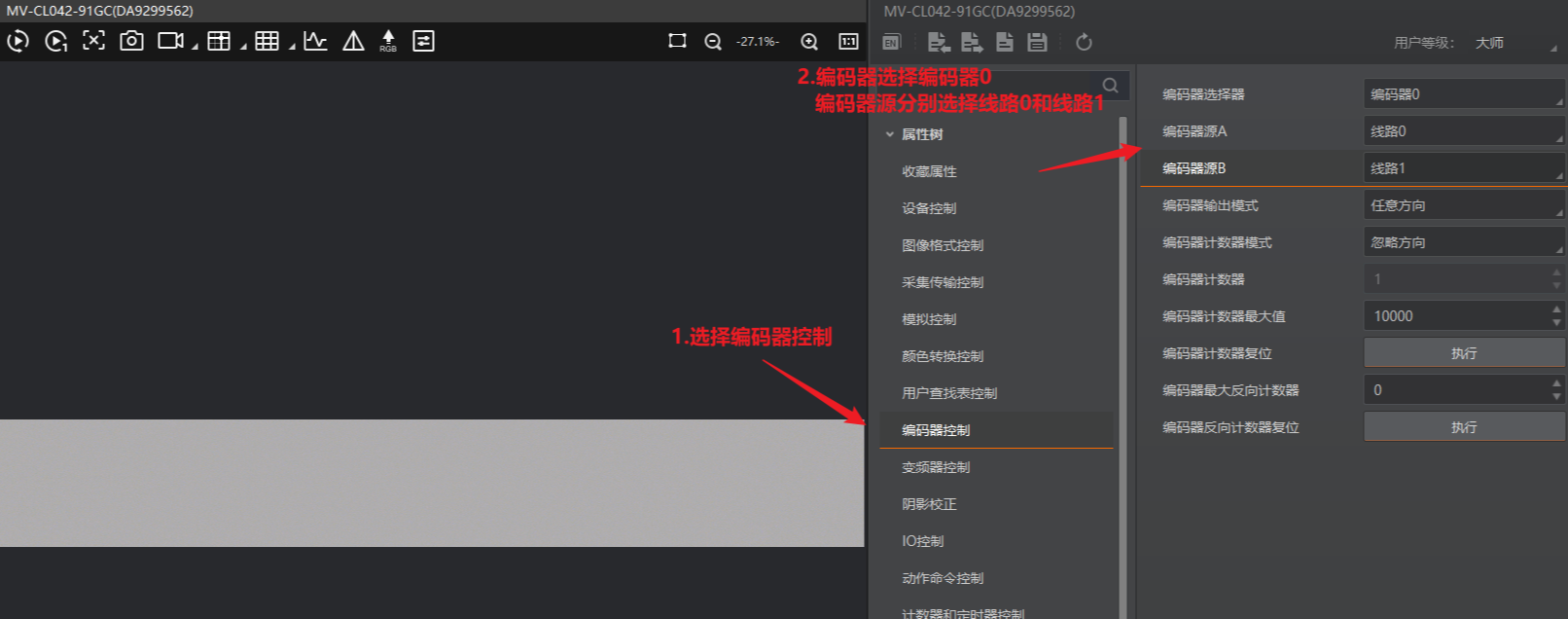
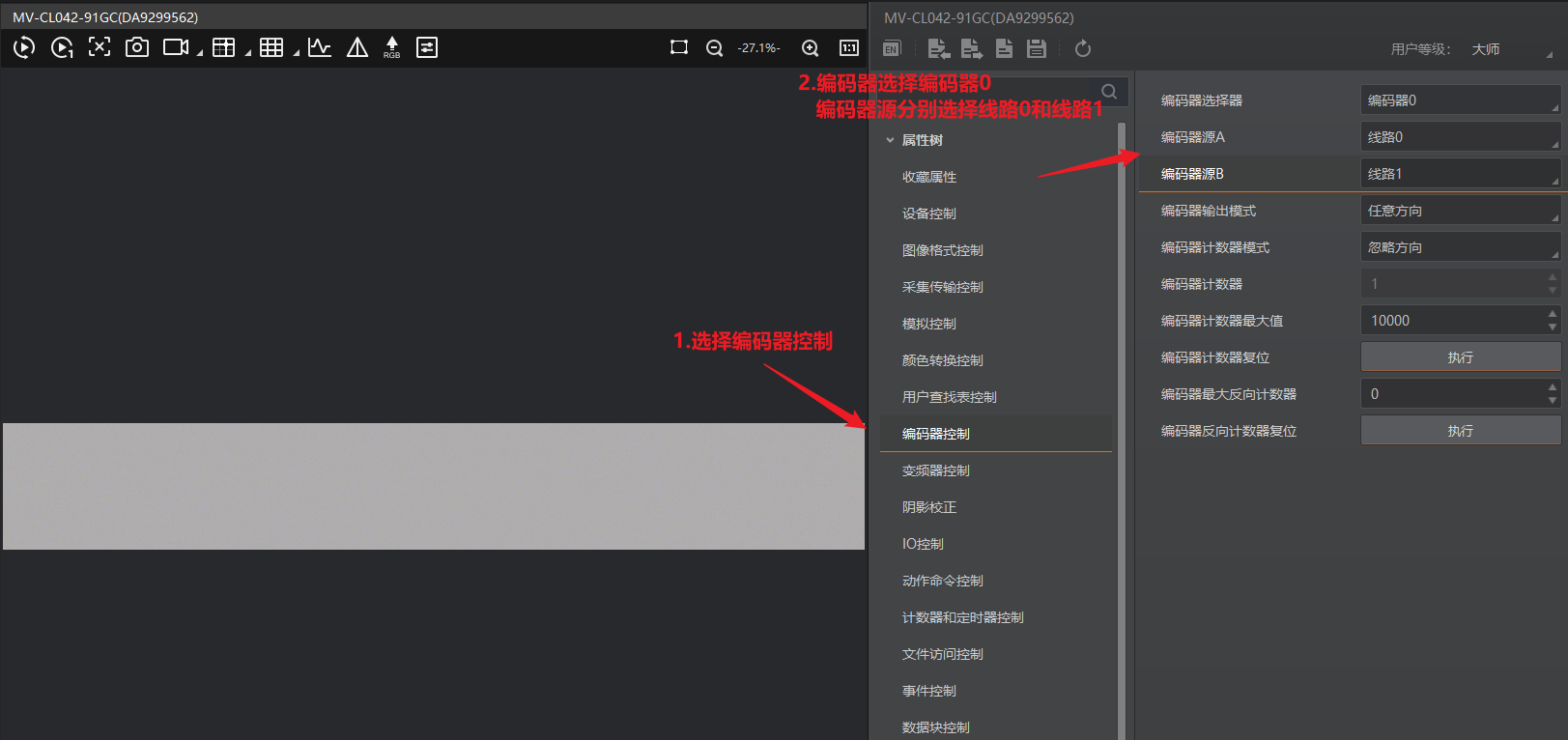
编码器设定
-
分频器设定