导读
在3D场景中,让AI根据自然语言"把那个红色的马克杯"分割出对应物体,是具身智能的关键能力。然而现有方法需要昂贵的每场景人工标注,且不同视角生成的伪标签相互矛盾,导致模型训练不稳定。
本文提出的TrackRef3D首次实现全自动、无需人工标注的开放世界3D指代分割,通过轨迹感知语义共识模块(TSCM)将多视角预测聚合成一致的规范语义身份,并利用混合训练策略(HTS)联合优化粗粒度类别语义和细粒度指代线索。在Ref-LERF基准上,TrackRef3D以38.8 mIoU超越此前SOTA(29.2)达9.6个百分点;在LERF-OVS上达到63.2 mIoU,在3D-OVS上达到95.2 mIoU。该方法为零样本、跨视角一致的3D场景理解提供了全新范式。
文章信息
- 标题:TrackRef3D: Multi-View Consistent Track-then-Label for Open-World Referring Segmentation in 3D Gaussian Splatting
-
作者:Yuyang Tan, Renhe Zhang, Hang Zhang, Ao Li, Xin Tan
-
机构:华东师范大学、上海人工智能实验室、电子科技大学
一、背景与挑战:3D指代分割的"昂贵标注"与"视角矛盾"
**指代3D高斯泼溅(R3DGS)**旨在通过自然语言从3D场景中分割出目标物体,即使该物体在新视角下被遮挡或不可见。这对于机器人导航和自动驾驶至关重要。然而现有方法(如ReferSplat)存在三大瓶颈:
-
昂贵的人工标注:每个场景都需要人工标注类别标签和指代描述,无法规模化部署。
-
多视角不一致:利用2D基础模型逐视图生成伪掩码时,由于遮挡和领域特定词汇,同一物体在不同视角下可能得到互相矛盾的标签(例如一碗拉面在一张图中被标为"ramen",另一张图中却被标为"bowl")。
-
长查询过拟合:训练时过度依赖长描述,导致模型对用户常用的短查询泛化能力差。
本文提出的TrackRef3D 通过"追踪-标记"范式,将物体发现与语义对齐解耦,完全自动化地生成多视角一致的监督信号,并利用混合训练策略同时适应长短查询。
二、方法:全自动的追踪-标记管道
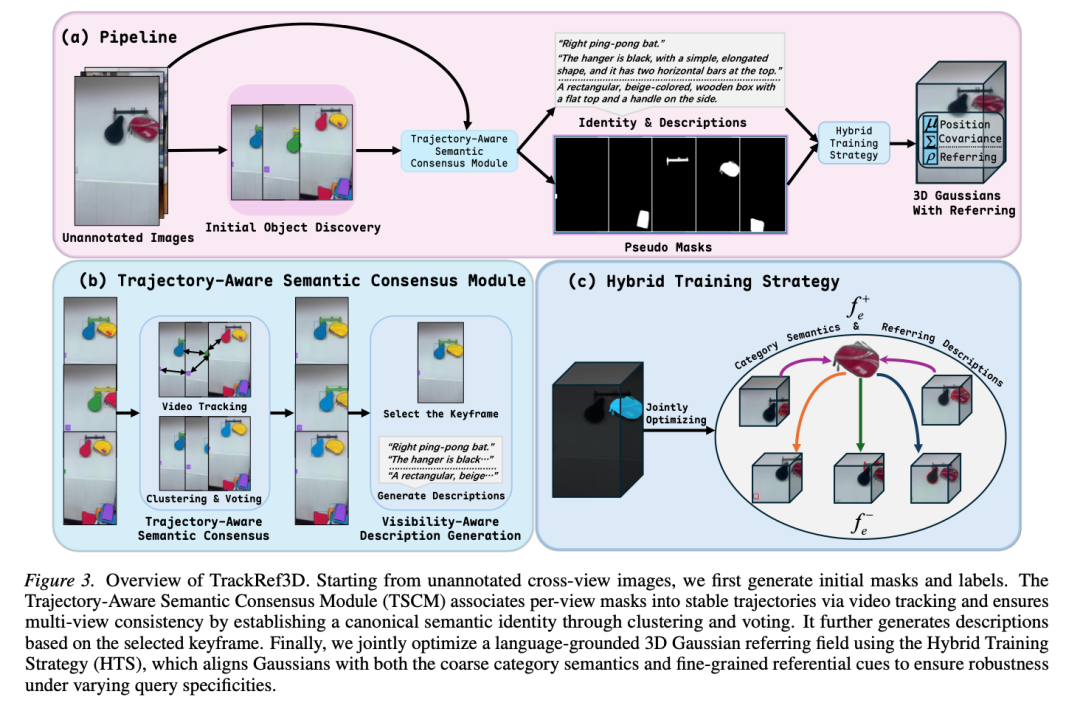
2.1 整体架构(原文图3)
TrackRef3D包含三个阶段:
-
初始物体发现:利用Florence-2进行开放词汇目标检测,再用SAM-2生成逐视图像素级掩码。保留所有预测,不提前过滤不一致。
-
轨迹感知语义共识模块(TSCM):通过视频追踪将同一物体的掩码关联成轨迹,再通过同义词聚类和轨迹内投票确定该物体的规范语义身份,并基于可见性分数选择最佳关键帧生成指代描述。
-
混合训练策略(HTS):将规范类别语义和生成的指代描述同时作为正样本,使用多正例对比损失训练语言嵌入的3D高斯场。
图片来源于原论文
2.2 轨迹感知语义共识模块(TSCM)
-
视频追踪:使用DEVA追踪器将逐视图掩码关联成轨迹,得到每个物体的跨视图轨迹 (T_i)。
-
同义词聚类:对轨迹内所有预测标签的文本嵌入进行层次聚类(余弦距离阈值 (\tau_{\text{rem}}=0.85)),将同义标签(如"ramen"和"bowl"如果语义相近)合并为一个簇,并选取最短表面形式作为簇身份。
-
轨迹内投票 :对每个轨迹,统计各簇身份的出现频率,选取得票最多的作为该轨迹的规范语义身份(c_i^*),并传播到轨迹内所有视图,确保跨视图标签完全一致。
-
描述生成 :为避免从遮挡视图生成模糊描述,设计可见性得分,选择中等面积(不特别大也不特别小)的关键帧,再用CogVLM2生成指代描述。
2.3 混合训练策略(HTS)
将轨迹的规范语义标签和生成的指代描述都视为同一物体的正样本,使用多正例对比损失:
其中 包含所有与该物体相关的正描述(类别名+指代描述),是批内所有描述(作为负样本)。此损失迫使同一物体的3D高斯嵌入与所有相关文本描述(无论长短)都保持高相似度,从而提升对短查询的泛化能力。
总损失 ,其中 为渲染掩码与TSCM伪掩码的二元交叉熵。
三、实验结果
3.1 基准与指标
-
Ref-LERF:4个真实场景,人工标注指代描述,评估mIoU。
-
LERF-OVS / 3D-OVS:开放词汇基准,使用类别名查询。
-
自采实验室场景:1033视图训练,10视图测试,人工标注2D掩码作为真值。
图片来源于原论文
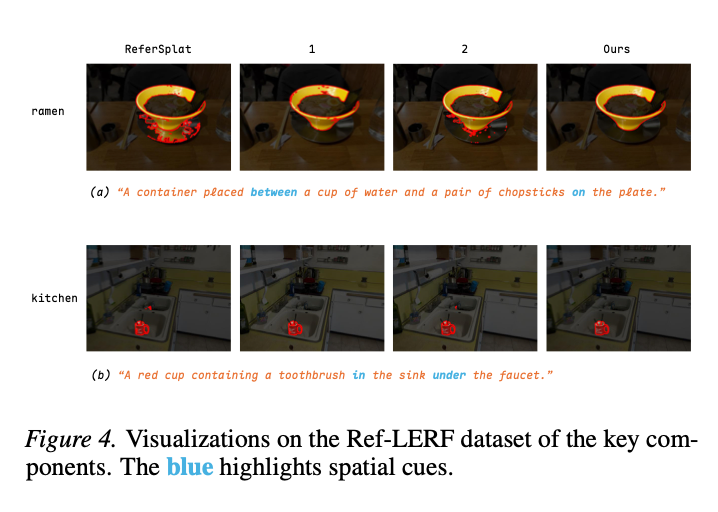
3.2 主要结果(Ref-LERF)
| 方法 | Ramen | Figurines | Teaware | Kitchen | 平均 |
|---|---|---|---|---|---|
| SPIn-NeRF | 7.3 | 9.7 | 11.7 | 10.3 | 9.8 |
| LangSplat | 12.0 | 17.9 | 7.6 | 17.9 | 13.9 |
| GS-Grouping | 27.9 | 8.6 | 14.8 | 6.3 | 14.4 |
| Grounded SAM | 14.1 | 16.0 | 16.9 | 16.2 | 15.8 |
| GOI | 27.1 | 16.5 | 22.9 | 15.7 | 20.5 |
| ReferSplat | 35.2 | 25.7 | 31.3 | 24.4 | 29.2 |
| TrackRef3D | 45.7 | 34.2 | 41.7 | 33.6 | 38.8 |
TrackRef3D平均提升9.6个百分点。
3.3 自采实验室场景
| 方法 | 指代查询 | 语义查询 |
|---|---|---|
| GS-Grouping | 28.9 | 36.1 |
| LangSplat | 13.6 | 41.2 |
| ReferSplat | 37.4 | 24.4 |
| TrackRef3D | 48.5 | 68.3 |
3.4 LERF-OVS 和 3D-OVS 基准
| 方法 | LERF-OVS平均 | 3D-OVS平均 |
|---|---|---|
| Feature-3DGS | 45.7 | 87.8 |
| GS-Grouping | 46.3 | 87.7 |
| GOI | 50.6 | 90.6 |
| LangSplat | 51.4 | 93.4 |
| ReferSplat | 55.4 | 94.1 |
| TrackRef3D | 63.2 | 95.2 |
四、消融与深度分析
4.1 模块贡献消融(Ref-LERF)
| 配置 | TSCM | HTS | Ramen | Kitchen |
|---|---|---|---|---|
| Baseline | × | × | 35.2 | 24.4 |
| +TSCM | ✓ | × | 39.4 | 29.1 |
| +HTS | × | ✓ | 37.7 | 26.3 |
| 完整 | ✓ | ✓ | 45.7 | 33.6 |
4.2 TSCM各组件分解
| 配置 | Ramen | Kitchen |
|---|---|---|
| Baseline | 35.2 | 24.4 |
| (A) Florence-2+SAM-2 | 23.1 | 13.7 |
| (B) (A)+追踪 | 23.1 | 13.7 |
| (C) (B)+仅聚类 | 31.7 | 22.8 |
| (D) (B)+仅投票 | 39.3 | 27.1 |
| 完整TSCM | 45.7 | 33.6 |
4.3 同义词聚类阈值敏感性
| Ramen | Kitchen | |
|---|---|---|
| 0.70 | 29.6 | 20.4 |
| 0.75 | 33.1 | 24.7 |
| 0.80 | 39.5 | 28.4 |
| 0.85 | 45.7 | 33.6 |
| 0.90 | 41.3 | 28.5 |
4.4 描述生成关键帧选择
| 策略 | Ramen | Kitchen |
|---|---|---|
| 最大面积 | 19.4 | 12.0 |
| 最小面积 | 23.1 | 16.3 |
| 随机 | 35.9 | 26.4 |
| 中位数 | 40.3 | 29.2 |
| 权重(σ=50) | 39.8 | 29.4 |
| 权重(σ=100) | 45.7 | 33.6 |
| 权重(σ=125) | 43.6 | 31.3 |
五、总结与展望
核心贡献:
-
首个全自动开放世界3D指代分割管道:无需人工标注,仅需多视图RGB图像和重建的3D高斯场景。
-
轨迹感知语义共识模块(TSCM):通过追踪、同义词聚类和轨迹内投票,彻底解决多视角伪标签不一致问题。
-
混合训练策略(HTS):将类别语义和指代描述同时作为正样本,用多正例对比损失训练,显著提升对短查询的泛化能力。
-
SOTA性能:在Ref-LERF上平均mIoU 38.8(+9.6),实验室场景指代48.5、语义68.3,LERF-OVS 63.2,3D-OVS 95.2。
局限与未来方向:
-
描述生成质量受限于VLM在特定场景下的表现,极端小物体或罕见外观生成描述可能不准确。
-
当前仅在中等规模场景验证,更大规模、更动态的环境需进一步测试。
TrackRef3D为实现零标注、跨视角一致的3D场景理解提供了可落地的技术路径,有望推动具身智能在真实世界的部署。