前言
-
最近的项目需要用到
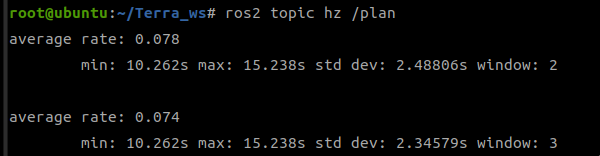
navigation2中的全局路径规划器提供的/plan用于自主局部路径规划lqr的实现,但是奈何出现了以下的问题: -
-
如上所示,全局路径规划器提供的
/plan更新的频率过低,即便是更改了导航的配置参数也无动于衷:- 但实际上,
expected_planner_frequency只是用来监控 planner 是否按预期运行,超出会报 warning,但不会改变实际规划频率。
- 但实际上,
yaml
planner_server:
ros__parameters:
expected_planner_frequency: 10.0
use_sim_time: false
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_navfn_planner/NavfnPlanner"
tolerance: 0.2
use_astar: false
allow_unknown: true- 本文提供一个方案,在不更改底层源码的前提,直接暴力修改
nav2运行时候的行为树,来达到提高navigation2全局路径更新频率的效果。
解决方案
分析
- 通常情况下,
nav2导航的启动文件bringup_launch.py会加载nav2.yaml,我们在其中可以看到:- 关于导航的基础参数可以看之前的文章:【10天速通Navigation2】(六):Navigation2 导航bringup基础配置和参数详解
yaml
bt_navigator:
ros__parameters:
use_sim_time: false
global_frame: map
robot_base_frame: base_link
odom_topic: /odom
bt_loop_duration: 10
default_server_timeout: 20
# 'default_nav_through_poses_bt_xml' and 'default_nav_to_pose_bt_xml' are use defaults:
# nav2_bt_navigator/navigate_to_pose_w_replanning_and_recovery.xml
# nav2_bt_navigator/navigate_through_poses_w_replanning_and_recovery.xml
# They can be set here or via a RewrittenYaml remap from a parent launch file to Nav2.
plugin_lib_names:
...- 可以看到注释里头说道,如果没有特别设置,则使用的是默认的
default_nav_through_poses_bt_xml和default_nav_to_pose_bt_xml
修改
- 我们可以新建一个
yaml(可以参考官方的默认实现 )
bash
mkdir -p /root/Terra_ws/src/slam/slam_gmapping/bt
cp \
/opt/ros/humble/share/nav2_bt_navigator/behavior_trees/navigate_to_pose_w_replanning_and_recovery.xml \
/root/Terra_ws/src/slam/slam_gmapping/bt/navigate_to_pose.xml- 这里也提供官方的默认实现:
xml
<!--
This Behavior Tree replans the global path periodically at 1 Hz and it also has
recovery actions specific to planning / control as well as general system issues.
This will be continuous if a kinematically valid planner is selected.
-->
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<RecoveryNode number_of_retries="6" name="NavigateRecovery">
<PipelineSequence name="NavigateWithReplanning">
<RateController hz="1.0">
<RecoveryNode number_of_retries="1" name="ComputePathToPose">
<ComputePathToPose goal="{goal}" path="{path}" planner_id="GridBased"/>
<ClearEntireCostmap name="ClearGlobalCostmap-Context" service_name="global_costmap/clear_entirely_global_costmap"/>
</RecoveryNode>
</RateController>
<RecoveryNode number_of_retries="1" name="FollowPath">
<FollowPath path="{path}" controller_id="FollowPath"/>
<ClearEntireCostmap name="ClearLocalCostmap-Context" service_name="local_costmap/clear_entirely_local_costmap"/>
</RecoveryNode>
</PipelineSequence>
<ReactiveFallback name="RecoveryFallback">
<GoalUpdated/>
<RoundRobin name="RecoveryActions">
<Sequence name="ClearingActions">
<ClearEntireCostmap name="ClearLocalCostmap-Subtree" service_name="local_costmap/clear_entirely_local_costmap"/>
<ClearEntireCostmap name="ClearGlobalCostmap-Subtree" service_name="global_costmap/clear_entirely_global_costmap"/>
</Sequence>
<Spin spin_dist="1.57"/>
<Wait wait_duration="5"/>
<BackUp backup_dist="0.30" backup_speed="0.05"/>
</RoundRobin>
</ReactiveFallback>
</RecoveryNode>
</BehaviorTree>
</root>- 上述代码的逻辑可以简单理解为:
bash
NavigateRecovery (最多6次)
└── PipelineSequence
├── 每1秒:
│ └── ComputePathToPose
│ └── fail → clear global costmap
│
└── FollowPath
└── fail → clear local costmap
如果整个失败:
└── ReactiveFallback
├── GoalUpdated → restart
└── RecoveryActions:
├── clear costmaps
├── spin
├── wait
└── back up- 然后我们可以直接在
yaml设置default_nav_to_pose_bt_xml的路径
yaml
bt_navigator:
ros__parameters:
use_sim_time: false
global_frame: map
robot_base_frame: base_link
odom_topic: /odom
bt_loop_duration: 10
default_server_timeout: 20
# 'default_nav_through_poses_bt_xml' and 'default_nav_to_pose_bt_xml' are use defaults:
# nav2_bt_navigator/navigate_to_pose_w_replanning_and_recovery.xml
# nav2_bt_navigator/navigate_through_poses_w_replanning_and_recovery.xml
# They can be set here or via a RewrittenYaml remap from a parent launch file to Nav2.
default_nav_to_pose_bt_xml: "/root/Terra_ws/src/slam/slam_gmapping/bt/navigate_to_pose.xml"- 注意:修改文件后记得编译!!!
- 运行
bringup_launch.py,可以通过查询确认运行的是我们新增的内容:
bash
ros2 param get /bt_navigator default_nav_to_pose_bt_xml
最终实现
- 如果你和本项目一样,只需要
navigation2中的全局路径规划器提供的/plan,那么你直接暴力删除其他内容,留下面内容即可。
xml
<!--
This Behavior Tree replans the global path periodically at 1 Hz and it also has
recovery actions specific to planning / control as well as general system issues.
This will be continuous if a kinematically valid planner is selected.
-->
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<Repeat num_cycles="-1">
<RateController hz="10.0">
<ComputePathToPose
goal="{goal}"
path="{path}"
planner_id="GridBased"/>
</RateController>
</Repeat>
</BehaviorTree>
</root>- 上述代码会约用一个极快的频率不断"重新计算从当前位姿到 goal 的全局路径",并把结果写入
{path},但不会执行运动。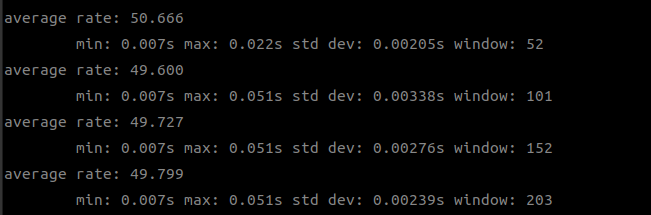
报错解决:
-
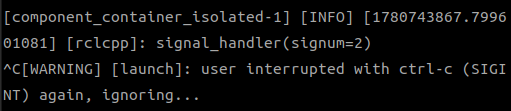
如果你尝试关掉
bringup_launch.py出现了下述报错 -
-
那就强行杀掉吧:
bash
pkill -9 -f component_container
pkill -9 -f bt_navigator
pkill -9 -f nav2总结
- 本文提供一个方案,在不更改底层源码的前提,直接暴力修改
nav2运行时候的行为树,来达到提高navigation2全局路径更新频率的效果。 - 如有错误,欢迎支持!
- 感谢观看!