酒店智能一卡通梯控与机器人乘梯系统:构建高效、自动化的垂直交通枢纽
【摘要】本方案构建了酒店智能梯控与机器人乘梯一体化系统,通过三层架构实现垂直交通智能化:1)管理层对接PMS自动同步房卡权限,集成机器人调度接口;2)控制层通过梯控主板实现刷卡权限验证与电梯操作;3)感知层为机器人提供实时电梯状态监测。系统核心价值在于打通人机协同流程,客人可刷卡直达楼层,机器人能自主完成送物乘梯。实施需重点关注定制线材适配、多系统接口联调及传感器精准安装,建议分阶段推进以降低风险。该方案显著提升酒店运营效率与服务智能化水平。
┌─────────────────────────────────────────────────────────────┐
│ 管理层(酒店前台) │
│ ┌──────────────┐ ┌──────────┐ ┌──────────┐ ┌─────────┐ │
│ │ 管理工作站 │ │ 发卡器 │ │ PMS接口 │ │ 机器人接口│ │
│ │ (DAIC-YKT) │ │(DAIC-RW) │ │(DAIC-PMS) │ │(DAIC-AGV)│ │
│ └──────────────┘ └──────────┘ └──────────┘ └─────────┘ │
└────────────────────┬────────────────────────────────────────┘
│ 485/网络
┌────────────────────▼────────────────────────────────────────┐
│ 控制层(电梯机房/轿厢) │
│ ┌──────────────┐ ┌──────────┐ ┌──────────┐ ┌─────────┐ │
│ │ 梯控主板 │ │ 读卡器 │ │ 触点扩展 │ │ 电源 │ │
│ │(DAIC-DT-DCMB)│ │(DAIC-DCDR)│ │(DAIC-DT-K)│ │(DAIC-Dp)│ │
│ └──────────────┘ └──────────┘ └──────────┘ └─────────┘ │
└────────────────────┬────────────────────────────────────────┘
│
┌────────────────────▼────────────────────────────────────────┐
│ 感知层(机器人乘梯) │
│ ┌──────────────┐ ┌──────────┐ ┌──────────┐ │
│ │ 楼层信号采集 │ │ 开关门检测 │ │ 楼层检测 │ │
│ │(DAIC-DT-LC) │ │(DAIC-DT-KG)│ │(DAIC-DT-LJ)│ │
│ └──────────────┘ └──────────┘ └──────────┘ │
└─────────────────────────────────────────────────────────────┘

一、 系统总览:三层融合,实现"人机分流、智慧调度"
本方案构建了一个以梯控一卡通平台 为核心,前台管理、轿厢控制、状态感知三层协同的智能化体系:
-
管理与接口层(前台):对接PMS,实现入住/退房自动授权;提供标准接口对接机器人系统,实现机器人任务调度。
-
控制与执行层(轿厢内):实现对人(客人/员工)刷卡乘梯的权限控制。
-
感知与协同层(机器人乘梯):为机器人提供电梯实时运行数据,确保其安全、精准地自动乘梯。
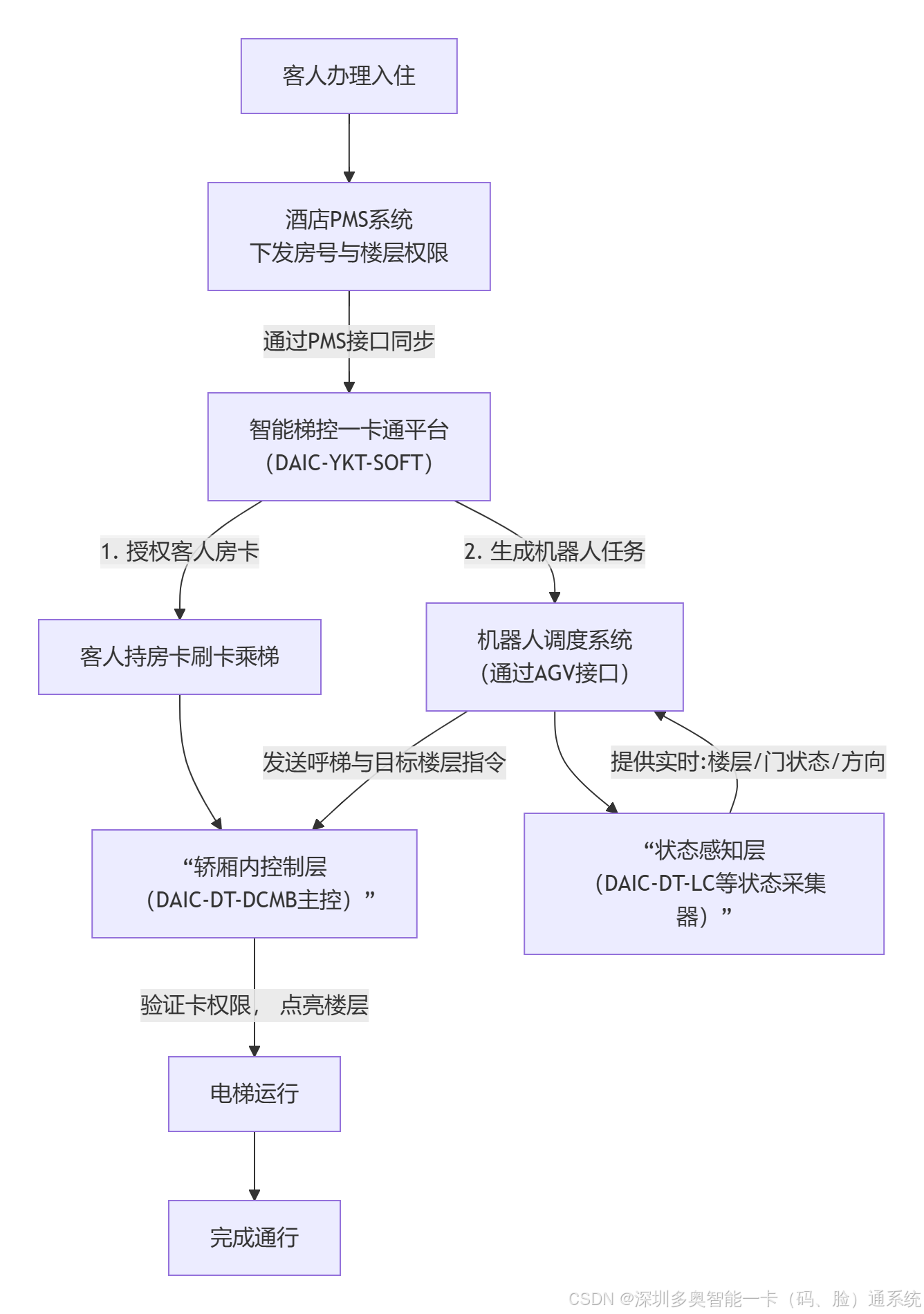
核心工作流程:人、机器、系统三方协同,可以通过以下流程图清晰展示:
flowchart TD
A[客人办理入住] --> B[酒店PMS系统<br>下发房号与楼层权限];
B -- 通过PMS接口同步 --> C[智能梯控一卡通平台<br>(DAIC-YKT-SOFT)];
C -- 1. 授权客人房卡 --> D[客人持房卡刷卡乘梯];
C -- 2. 生成机器人任务 --> E[机器人调度系统<br>(通过AGV接口)];
D --> F["轿厢内控制层<br>(DAIC-DT-DCMB主控)"];
E --> G["状态感知层<br>(DAIC-DT-LC等状态采集器)"];
F -- 验证卡权限, 点亮楼层 --> H[电梯运行];
G -- 提供实时:楼层/门状态/方向 --> E;
E -- 发送呼梯与目标楼层指令 --> F;
H --> I[完成通行];流程解读:
-
蓝色路径:传统客人通行流程,通过与PMS对接实现了自动化权限下发。
-
橙色路径 :机器人自动乘梯流程,其核心在于状态感知层为机器人提供决策依据,控制层执行机器人的乘梯指令。
-
绿色模块:一卡通平台是中枢,统一管理人、机器人的乘梯权限与调度。
┌────────────────────────────────────────────────────────────────┐
│ 酒店前台管理中心 │
│ ┌────────────────────┐ ┌──────────────┐ ┌───────────────┐ │
│ │ 梯控一卡通管理软件 │ │ PMS接口 │ │ 机器人接口 │ │
│ │ DAIC-YKT-SOFT │ │ DAIC-Soft-PMS│ │ DAIC-Soft-AGV │ │
│ └────────┬───────────┘ └──────┬───────┘ └───────┬───────┘ │
│ │ │ │ │
│ ┌────────┴───────────┐ ┌──────┴───────┐ ┌───────┴───────┐ │
│ │ 一卡通发卡器 │ │ PMS酒店系统 │ │ AGV机器人系统 │ │
│ │ DAIC-YKT-RW │ │ │ │ │ │
│ └────────────────────┘ └──────────────┘ └───────────────┘ │
├────────────────────────────────────────────────────────────────┤
│ TCP/IP 网络层 │
│ (无线网桥 / 工业交换机联网) │
├────────────────────────────────────────────────────────────────┤
│ 电梯现场设备层 │
│ ┌──────────────┐ ┌──────────────┐ ┌──────────────────────┐ │
│ │ 梯控控制器 │ │ 电梯读头 │ │ 轿厢运行状态采集 │ │
│ │ DAIC-DT-DCMB │ │ DAIC-DT-DCDR │ │ 楼层/开关门/上下行 │ │
│ └──────────────┘ └──────────────┘ └──────────────────────┘ │
└────────────────────────────────────────────────────────────────┘
消防报警信号 → 梯控控制器接收消警信号
↓
自动切换至非管制模式
↓
所有楼层按钮恢复自由操作
↓
电梯正常运行,保障人员疏散
二、 核心组件功能与协同详解
| 子系统 | 核心设备/服务 | 功能与协同关系 |
|---|---|---|
| 1. 管理中心与生态对接 (前台/服务器) | 梯控一卡通软件 (DAIC-YKT-SOFT) |
系统的总管理平台。负责卡务、权限、设备、记录管理。 |
PMS接口 (DAIC-Soft-PMS) |
酒店运营融合的关键。实现"入住自动开通楼层,退房自动失效",彻底解放前台人工发卡工作,杜绝差错。 | |
机器人接口 (DAIC-Soft-AGV) |
自动化延伸的核心。提供标准API/SDK,供机器人调度系统调用,实现机器人呼梯、派梯。 | |
发卡器 (DAIC-YKT-RW) |
用于发行员工卡、临时卡及系统调试。 | |
| 2. 轿厢内权限控制 (客人乘梯) | 梯控主板 (DAIC-DT-DCMB) |
轿厢顶的本地控制大脑。验证刷卡权限,控制电梯楼层。 |
梯控扩展板 (DAIC-DT-K) |
通过无源干触点安全连接电梯按键面板,模拟按压动作。 | |
IC卡读头 (DAIC-DT-DCDR) |
嵌入式安装,供客人刷卡。 | |
| 3. 电梯状态感知 (机器人乘梯基础) | 楼层信号采集器 (DAIC-DT-LC) |
系统的"眼睛" 。实时采集电梯运行方向、开关门状态、精确楼层,是机器人安全决策的唯一依据。 |
开关门/楼层检测器 (DAIC-DT-KG/LJ) |
辅助传感器,确保状态检测的冗余与精确。 | |
| 4. 工程与通信 (系统生命线) | 定制按键控制线/排线 | 施工质量关键。必须根据电梯型号定制,实现免破线、安全可靠的连接。 |
| 无线网桥 + 工业交换机 | 在轿厢顶与机房之间建立稳定、抗干扰的数据通道,保障指令与状态实时传输。 | |
485通讯线 (RVVP2 * 0.75) |
用于连接梯控主板与机器人信号接入点,传输呼梯指令与状态反馈。 |
 三、 方案核心价值:超越传统梯控
三、 方案核心价值:超越传统梯控
-
对酒店管理方:
-
运营提效:与PMS对接,实现零人工干预的权限管理,节省人力,提升客人入住体验。
-
安全保障:严格区分客人与员工区域,防止非住客随意进入客房楼层。
-
服务创新:为引入送货机器人、清洁机器人奠定基础,提升酒店科技与服务形象。
-
-
对客人 :一卡直达,无需在轿厢内按楼层,体验便捷、私密、安全。
酒店前台
住客办理入住 → 前台PMS系统自动/手动发卡
↓
房卡写入所住楼层数据
↓
住客进入电梯 → 在读头上刷卡
↓
梯控控制器验证卡号与权限 → 自动点亮对应楼层按钮
↓
电梯运行至住客楼层
↓
住客退房 → PMS系统通知梯控 → 卡片权限自动失效
住客
住客进入电梯 → 在读头上刷卡
↓
控制器验证卡号与权限
↓
验证通过 → 自动点亮授权楼层按钮 → 电梯运行
↓
验证失败 → 楼层按钮不响应 → 语音提示"无效卡"
- 对机器人自动化 :提供了标准化、可依赖的电梯调度接口,使机器人能在酒店内自主完成送物、清洁等任务,实现真正的"无人化服务延伸"。
机器人
机器人收到任务(如送餐至N楼)
↓
机器人调用梯控接口 → 呼叫电梯至当前楼层
↓
梯控系统控制电梯到达 → 开门
↓
机器人检测电梯到达 → 进入轿厢
↓
机器人调用梯控接口 → 选择目标楼层N
↓
梯控系统点亮N楼按钮 → 电梯运行
↓
电梯到达N楼 → 开门
↓
机器人检测到达 → 离开轿厢 → 完成乘梯

四、 关键实施要点与风险提示
您清单中B部分"工程线材"是项目成功落地的关键,需特别注意:
-
电梯对接的复杂性与安全性:
- 勘查必须前置 :安装前必须提供电梯按键面板的正面和内部接线照片,以定制正确的控制线和排线。
电梯轿厢运行 → U感楼层检测器采集楼层位置
↓
光电开关门检测器采集门状态
↓
电梯方向信号采集上下行状态
↓
楼层信号采集器(DAIC-DT-LC)汇总处理
↓
通过RS-485/TCP-IP上传至梯控系统/机器人系统
↓
机器人获取实时状态 → 判断乘梯时机
-
- 取电与施工配合:必须在电梯维保单位配合下,从轿厢顶检修箱取电。所有施工不得影响电梯原安全回路。
-
网络部署的可靠性:
- 电梯井道环境复杂,工业交换机 和电梯专用无线网桥的选型和安装位置至关重要,必须确保网络全程稳定,避免因网络延迟导致机器人指令超时。
-
多方接口联调:
- PMS接口:需与酒店软件供应商明确数据同步机制(实时/定时)、字段格式(房号、楼层、入住时间、离店时间)。
客人入住
住客在前台办理入住
↓
PMS生成入住信息(房间号、入住时间、退房时间)
↓
PMS调用梯控API / 写入中间表
↓
梯控系统写入房卡 → 楼层权限生效
↓
住客拿到房卡 → 可刷卡通梯到达所住楼层
客人退房
住客在前台办理退房
↓
PMS生成退房信息
↓
PMS调用梯控API / 写入中间表
↓
梯控系统注销房卡 → 楼层权限失效
↓
房卡无法再刷卡通梯
-
- 机器人接口:需与机器人厂商共同定义完整的通信协议,包括:机器人呼梯、取消指令、电梯状态订阅、到达通知等,并进行充分的安全逻辑测试(如防夹、故障处理)。
-
状态检测的精准性:
- 机器人乘梯安全完全依赖于
DAIC-DT-LC等传感器的数据。安装必须极其精确,调试阶段需反复验证数据的实时性与准确性,确保机器人收到的"门全开、已平层"信号与现场100%同步。
- 机器人乘梯安全完全依赖于
机器人轿厢外
机器人到达候梯厅 → 调用梯控API呼叫电梯
↓
梯控系统向指定电梯发送指令 → 电梯前往机器人所在楼层
↓
楼层信号采集器反馈:电梯到达、开门
↓
机器人检测门已开 → 进入轿厢
机器人轿厢内
机器人进入轿厢 → 调用梯控API选择目标楼层
↓
梯控系统点亮目标楼层按钮 → 电梯运行
↓
楼层信号采集器实时反馈运行状态
↓
到达目标楼层 → 开门
↓
机器人检测门已开 → 离开轿厢
**五、**梯控工程线材配置
5.1 线材清单
| 序号 | 名称 | 规格 | 用途 | 备注 |
|---|---|---|---|---|
| 1 | 电源线 | RVV3×1.0 | 智能梯控系统供电 | 轿箱顶取电,一般用一个插排/台 |
| 2 | 楼层按键控制线 | 软排线/定制 | 控制器与电梯操作面板按键连接 | 一般6米,需提供按键正面照可做对插 |
| 3 | 电源拔动开关控制线 | RVV6×0.5 | 控制器至电梯操作面板检修司机口拔动开关 | 一般6米 |
| 4 | IC卡电梯读头数据线 | RVVP6×0.5 | 电梯门禁控制器与梯控读头连线 | 一般6米 |
| 5 | 485通讯线 | RVVP2×0.75 | 控制器与第三方连线 | 机器人RS-485通讯时使用 |
| 6 | 随行电缆 | --- | 电梯公司提供 | 主要接消防信号 |
5.2 联网设备
| 序号 | 名称 | 规格 | 用途 |
|---|---|---|---|
| 7 | 电梯专用无线网桥 | --- | 联网梯控(轿厢到机房无线传输) |
| 8 | 工业交换机 | --- | 联网电梯门禁(有线组网) |
5.3 安装配件
| 序号 | 名称 | 规格 | 用途 |
|---|---|---|---|
| 9 | 梯控安装包 | 电梯门禁配件 | 线槽、扎带、螺丝等安装辅材 |
5.4 线材说明
5.4.1 电源线 RVV3×1.0
- 用途:智能梯控系统供电
- 取电方式:从电梯轿厢顶部维修灯220V插线排取电
- 一般用量:每台电梯一个插排
- 线径:3芯1.0mm²,满足梯控系统供电需求
5.4.2 楼层按键控制线
- 用途:智能电梯门禁控制器与电梯操作面板按键连接
- 类型:软排线或定制对插线
- 一般长度:6米
- 特殊说明:如提供电梯操纵盘按键正面照片和内部照片,可定制对插线束,无需破线焊接
5.4.3 电源拔动开关控制线 RVV6×0.5
- 用途:梯控控制器至电梯操作面板检修司机口拔动开关
- 一般长度:6米
- 线径:6芯0.5mm²
5.4.4 IC卡电梯读头数据线 RVVP6×0.5
- 用途:电梯门禁控制器与梯控读头之间数据传输
- 一般长度:6米
- 线径:6芯0.5mm²,屏蔽线防干扰
5.4.5 485通讯线 RVVP2×0.75
- 用途:智能电梯控制器与第三方系统(如机器人)通讯
- 线径:2芯0.75mm²,屏蔽线
- 适用场景:机器人采用RS-485通讯时使用
5.5 联网方案
方案一:无线网桥联网
轿厢梯控控制器 → 无线网桥(发射端)
↓ 无线传输
机房无线网桥(接收端)→ 交换机 → 管理平台
- 适用于电梯井道无法布设网线的场景
- 无线传输稳定,延迟低
方案二:工业交换机有线联网
轿厢梯控控制器 → 随行网线 → 机房工业交换机 → 管理平台
- 适用于电梯随行电缆可附带网线的场景
- 传输稳定可靠,带宽充裕
六、.设备配置清单
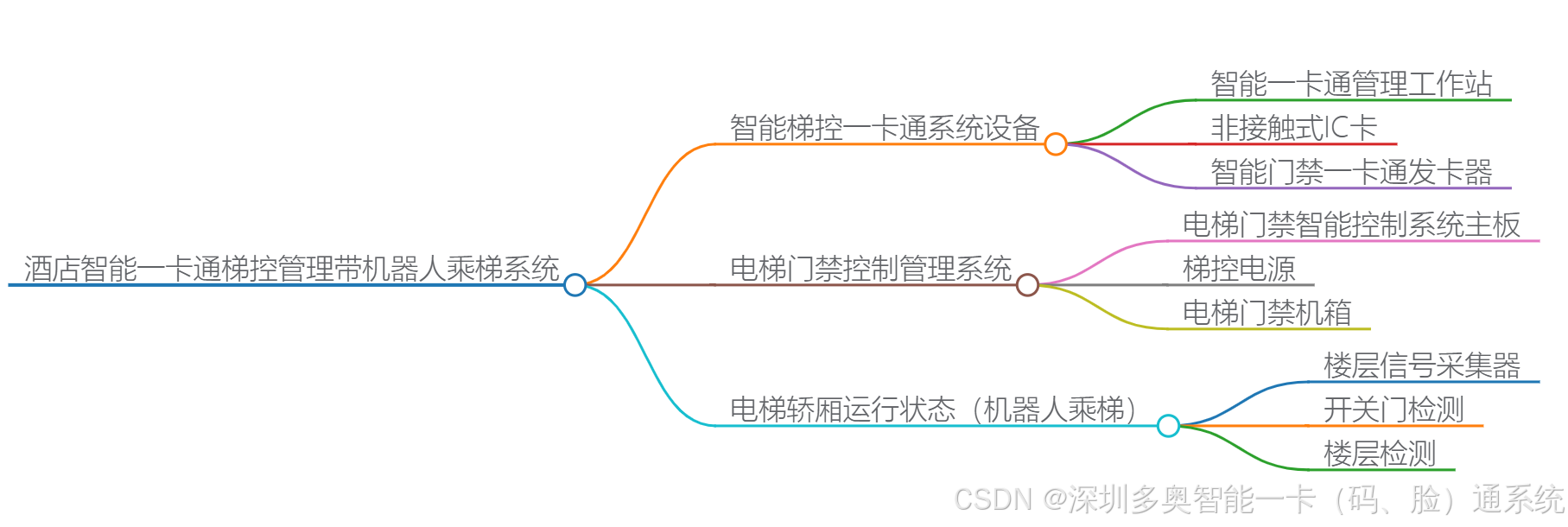
6.1 A-一、智能一卡通授权发卡及安防管理中心系统设备
| 序号 | 设备名称 | 型号 | 单位 | 数量 | 说明 |
|---|---|---|---|---|---|
| 1 | 智能一卡通管理工作站 | --- | 台 | 1 | 前台,多奥部署梯控软件 |
| 2 | 非接触式IC卡(调试卡) | DAIC-YKT-AM1 | 张 | 1 | 1张通卡,其他单层测试 |
| 3 | 非接触式IC卡(用户卡) | IC S50 M1 | 张 | 按需 | 房卡,根据需求配置 |
| 4 | 智能门禁一卡通发卡器 | DAIC-YKT-RW | 台 | 1 | 含系统操作、调试、授权 |
| 5 | 智能梯控一卡通管理软件 | DAIC-YKT-SOFT | 套 | 1 | 开通电梯 |
| 6 | PMS接口 | DAIC-Soft-PMS | 套 | 1 | 多奥提供接口并协助PMS对接 |
| 7 | 机器人接口 | DAIC-Soft-AGV | 套 | 1 | 多奥提供接口并协助AGV对接 |
说明:一个项目只需一套梯控管理中心,如对接PMS可一次性发卡。
6.2 A-二、电梯门禁控制管理系统
| 序号 | 设备名称 | 型号 | 单位 | 数量 | 说明 |
|---|---|---|---|---|---|
| 1 | 电梯门禁智能控制系统主板 | DAIC-DT-DCMB | 块 | 每梯1 | 管制轿厢内,可刷卡 |
| 2 | 梯控电源 | DAIC-DT-Dp | 台 | 每梯1 | 电梯门禁专用 |
| 3 | 电梯门禁机箱 | DAIC-DT-Dc | 个 | 每梯1 | 梯控专用 |
| 4 | 智能梯控触点扩展 | DAIC-DT-K | 块 | 按楼层 | 电梯按键 |
| 5 | 电梯门禁读头(IC卡) | DAIC-DT-DCDR | 个 | 每梯1 | 嵌入式,需根据现场情况选尺寸 |
| 6 | 智能电梯门禁智能管理系统软件 | DAIC-DT-SOFT | 套 | 每梯1 | 梯控软件 |
6.3 A-三、电梯轿厢运行状态(机器人乘梯)
| 序号 | 设备名称 | 型号 | 单位 | 数量 | 说明 |
|---|---|---|---|---|---|
| 1 | 楼层信号采集器 | DAIC-DT-LC | 台 | 每梯1 | 上下行、开关门、所在楼层 |
| 2 | 开关门检测 | DAIC-DT-KG | 套 | 每梯1 | 光电 |
| 3 | 楼层检测 | DAIC-DT-LJ | 套 | 每梯1 | U感 |
6.4 B、智能电梯梯控管理系统(电梯门禁工程线材)
| 序号 | 名称 | 规格 | 单位 | 数量 | 说明 |
|---|---|---|---|---|---|
| 1 | 电源线 | RVV3×1.0 | 米 | 每梯约5 | 轿箱顶取电,一个插排/台 |
| 2 | 梯控安装包 | --- | 套 | 每梯1 | 电梯门禁配件 |
| 3 | 楼层按键控制线 | 软排线/定制 | 米 | 每梯约6 | 控制器与操作面板按键,可做对插 |
| 4 | 电源拔动开关控制线 | RVV6×0.5 | 米 | 每梯约6 | 至检修司机口拔动开关 |
| 5 | IC卡电梯读头数据线 | RVVP6×0.5 | 米 | 每梯约6 | 控制器与读头连线 |
| 6 | 电梯随行电缆 | --- | --- | 电梯公司提供 | 主要接消防信号 |
| 7 | 485通讯线 | RVVP2×0.75 | 米 | 按需 | 机器人RS-485通讯时使用 |
| 8 | 电梯专用无线网桥 | --- | 对 | 按需 | 联网梯控 |
| 9 | 工业交换机 | --- | 台 | 按需 | 联网电梯门禁 |
总结:
这套系统,是酒店行业智能化升级的典范方案。它成功地将客人服务流程 、酒店运营系统 和自动化设备 通过电梯这个垂直枢纽深度整合。实施的核心挑战不在于硬件安装,而在于与电梯维保、PMS供应商、机器人厂商三方的紧密协调与深度联调。建议采用分阶段实施策略:先完成基础的客人梯控并与PMS对接,稳定运行后再实施机器人乘梯模块,以控制项目风险,确保每个环节的可靠性。
这份方案,为现代化智慧酒店描绘了一幅完整的**"人机共融、数据打通、全流程自动化"** 的垂直交通蓝图。它不仅实现了基础的客人楼层权限管控,更进一步打通了酒店PMS与机器人调度系统,将电梯从被动工具转变为可主动调度的智能资源。以下是对该方案系统架构、核心工作流程及工程实施要点的深度解析。