嵌入式视觉是物联网、智能硬件、工业自动化、机器人、安防监控领域的核心技术。区别于PC端视觉开发,嵌入式视觉具备低功耗、边缘本地化、轻量化、嵌入式闭环控制、无网可用、硬件分层协作等核心特征。
本文基于目前行业主流嵌入式开发硬件平台:ESP32、K230、RDK-X5、树莓派 ,结合七大标准嵌入式视觉开发赛道、全套开源技术框架、分层架构与落地场景,形成一套完整、自洽、可落地、可量产的嵌入式视觉技术体系。
本文解决行业普遍痛点:硬件选型混乱、技术栈混用、场景匹配错误、架构分层不清晰、项目复用率低等问题。
一、嵌入式视觉整体架构分层
完整嵌入式视觉系统遵循采集层 → 前端AI推理层 → 中端机器人/3D视觉层 → 后端服务中枢层的硬件分层逻辑,四平台无竞争关系,属于流水线互补协作。
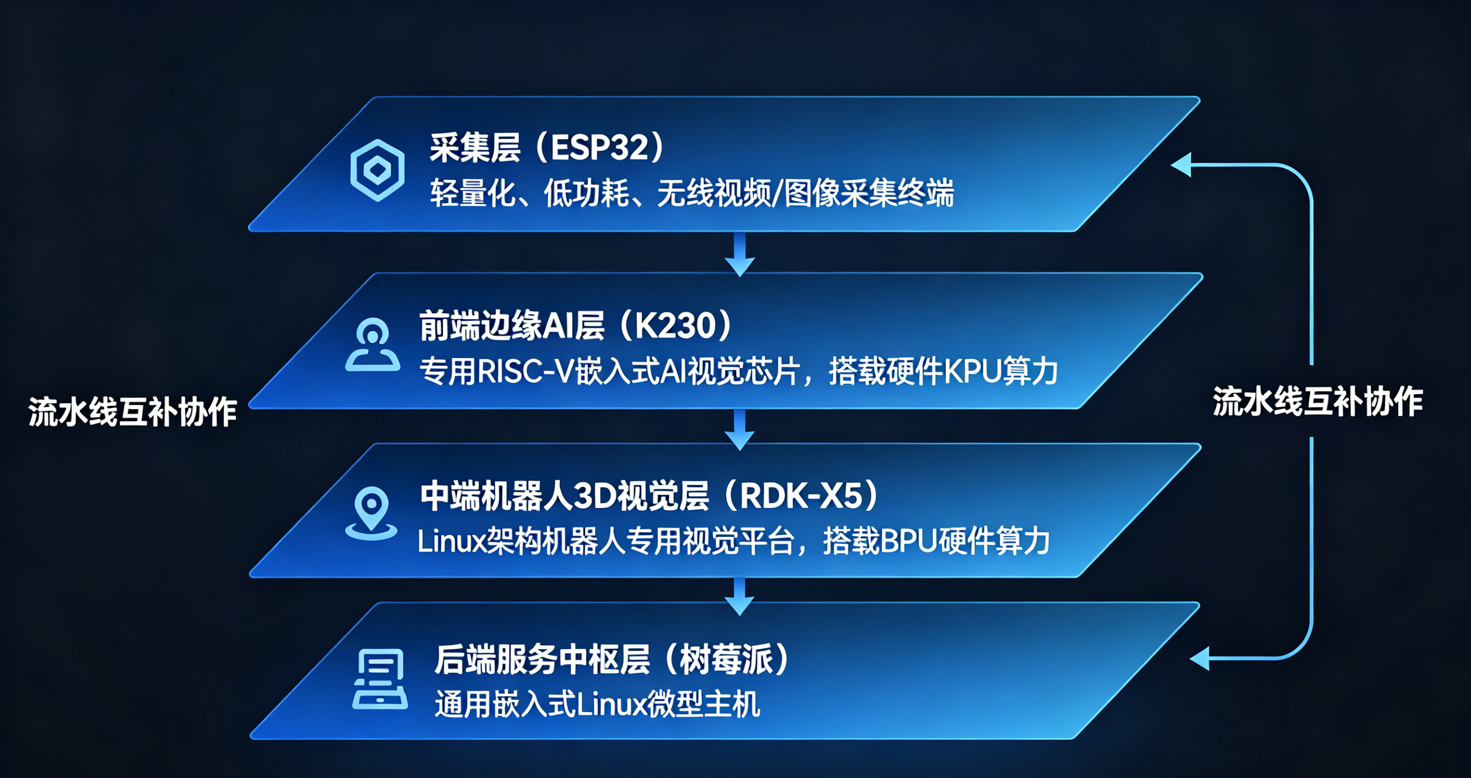
1. 采集层(ESP32)
定位:轻量化、低功耗、无线视频/图像采集终端,主打联网推流、电池抓拍、低成本IoT视觉,无硬件AI算力,专注图像采集与数据上传。
2. 前端边缘AI层(K230)
定位:专用RISC-V嵌入式AI视觉芯片,搭载硬件KPU算力,主打离线本地AI推理、多摄采集、工业机器视觉、电池智能抓拍,是目前轻量化嵌入式AI相机的核心主力。
3. 中端机器人3D视觉层(RDK-X5)
定位:Linux架构机器人专用视觉平台,搭载BPU硬件算力,原生支持双目深度、SLAM、ROS2多模态开发,主打智能机器人、AGV导航、三维感知、复杂工业AI分析。
4. 后端服务中枢层(树莓派)
定位:通用嵌入式Linux微型主机,无强前端实时AI算力,主打流媒体转发、NVR智能录像、协议网关、数据存储、系统集成、第三方生态对接,是整套视觉系统的后台大脑。
二、四大核心硬件平台全方位对比
|----------|-----------------------|------------------------|------------------------|--------------------|
| 对比维度 | ESP32-CAM | K230 | RDK-X5 | 树莓派(4/5) |
| 系统架构 | FreeRTOS/MCU架构,轻量实时 | RTOS+RISC-V,专用视觉实时系统 | Linux+ARM A55,机器人全功能系统 | 完整Linux,通用计算系统 |
| AI算力 | 无硬件NPU,仅软件侦测 | 6TOPS KPU硬加速,轻量化YOLO全系 | 10TOPS BPU硬加速,多模型并行推理 | CPU软推理,前端实时AI能力弱 |
| 相机接口 | 单路DVP,最高1080P@15fps | DVP+3路MIPI,支持4K/双目/三摄 | 双MIPI,原生双目硬件深度 | MIPI/USB,多路流媒体接入 |
| 原生网络 | WiFi/蓝牙(原生自带) | 无原生网络,需外接模组 | 网口/WiFi/蓝牙 | 网口/WiFi/蓝牙 |
| 功耗特性 | 极低功耗,μA级休眠,电池续航数月 | 中低功耗,支持休眠,可电池供电 | 中高功耗,仅适合市电运行 | 高功耗,必须市电供电 |
| 开发门槛 | 极低(Arduino/ESP-IDF) | 中等(CanMV/C SDK) | 高(Linux+ROS2) | 中等(通用Linux生态) |
| 核心定位 | IoT无线采集、低功耗抓拍、标准IPC终端 | 离线AI视觉、工业机器视觉、前端智能推理 | 3D视觉、ROS机器人、多模态AI | 流媒体网关、NVR存储、系统集成中枢 |
三、嵌入式视觉技术路线
行业所有嵌入式Camera项目,均可归纳为七大核心赛道,各赛道技术栈、硬件选型、开源框架完全固化,无技术歧义。
赛道一:标准局域网IPC监控系统(家用/商用ONVIF设备)
核心特征:基于TCP/IP局域网,支持RTSP/WebRTC/HLS多协议、ONVIF设备发现、NVR录像存储,对标海康大华商用IPC。
硬件分工:
- 采集端:ESP32-CAM(标准低成本IPC)、K230+WiFi模组(AI增强IPC)
- 流转发与NVR:树莓派(MediaMTX、go2rtc、Frigate)
- 高端商用IPC:RDK-X5(多路视频AI结构化分析)
核心技术框架:MediaMTX、go2rtc、GStreamer、OpenIPC、SmolRTSP
落地场景:家庭监控、厂房安防、NAS接入摄像头、商用智能IPC
赛道二:低延迟裸WiFi FPV图传系统(无人机/车载)
核心特征:跳过TCP/IP协议栈,MAC层原始发包,FEC纠错,延迟<30ms,远距离传输,区别于传统局域网流媒体。
硬件分工:
- 机载采集:ESP32-CAM(低成本主力)
- 机载AI增强:K230(图像预处理、目标叠加、画质优化)
- 地面接收解码:树莓派/RDK-X5
核心开源项目:WFB-NG、OpenHD、EZ-WifiBroadcast、GStreamer硬编码
落地场景:无人机FPV、车载盲区图传、野外便携巡检设备
赛道三:边缘AI智能视觉相机(本地推理智能化)
核心特征:视频采集+本地AI推理一体化,本地完成人/车/物识别、抓拍、告警,无需云端算力。
硬件分工:
- 低成本AI抓拍:ESP32-CAM+ncnn轻量模型
- 主流离线AI相机:K230(KPU硬件加速,YOLO全系列适配)
- 机器人3D智能视觉:RDK-X5(双目深度+多模态AI)
- 多路AI录像分析:树莓派+Frigate NVR
核心推理框架:RKNN、ncnn、Tengine、OpenCV-DNN、K230专属KPU框架
落地场景:人形告警、车牌识别、流水线质检、智能抓拍安防
赛道四:超低功耗电池抓拍系统(无人值守)
核心特征:μA级深度休眠,PIR/毫米波/定时唤醒,仅抓拍图片不上传持续视频,数月级电池续航。
硬件分工:
- 主力终端:ESP32-CAM(极致低功耗)
- 智能筛选终端:K230(AI过滤无效画面,降低传输功耗)
- RDK-X5/树莓派:不适用(功耗过高)
通信方案:MQTT局域网、LoRa远距离、NB-IoT基站传输
落地场景:野外生态抓拍、工地无人值守、仓库超低功耗安防
赛道五:离线机器视觉系统(工业自动化闭环)
核心特征:断网可用、无视频预览,通过图像算法输出结果直接控制IO、舵机、电磁阀,实现工业闭环控制。
硬件分工:
- 入门视觉:ESP32-CAM基础图像处理
- 工业主力:K230(传统视觉+硬件AI一体化,替代OpenMV)
- 复杂工业视觉:RDK-X5/树莓派+OpenCV
核心算法:轮廓检测、颜色追踪、边缘识别、AprilTag、二维码解码、目标分类检测
落地场景:流水线缺料检测、工件分拣、液位检测、扫码门禁
赛道六:UVC虚拟摄像头系统(即插即用视频设备)
核心特征:通过USB OTG UVC协议,设备免驱被电脑、安卓、OBS识别,不依赖WiFi传输。
硬件分工:
- 低成本UVC:ESP32-S3-CAM
- AI智能UVC:K230+USB转接(自带AI识别画面叠加)
- 多路UVC采集:树莓派/RDK-X5
核心方案:esp-uvc-camera、tinyUVC、Linux UVC Gadget
落地场景:直播副摄像头、工业内窥镜、外置智能相机
赛道七:ROS机器人视觉系统(导航与运动控制)
核心特征:图像封装ROS话题,实现光流、SLAM、AprilTag定位,视觉算法直接闭环控制电机运动,为机器人提供视觉感知。
硬件分工:
- 前端感知:ESP32-CAM/K230(图像采集、特征提取、AI检测)
- 主控决策:RDK-X5(ROS2原生适配、SLAM、避障导航最优)
- 通用备选:树莓派(入门ROS机器人开发)
核心技术:ROS2 Humble、OpenCV-ArUco、视觉光流、目标跟踪话题发布
落地场景:自主巡检机器人、跟随小车、机械臂视觉抓取、AGV导航
四、各平台技术栈与底层框架
1. 全平台通用底层基础
V4L2视频采集内核、FFmpeg编解码、通用OpenCV图像算法、TCP/IP流媒体协议栈,是所有嵌入式视觉项目的底层依赖。
2. ESP32-CAM专属技术栈
esp32-camera官方底层驱动、Arduino/ESP-IDF、SmolRTSP、ULP低功耗休眠、MQTT物联网传输。主打采集、联网、低功耗。
3. K230专属技术栈(核心差异化)
CanMV/MaixPy开发框架、KPU硬件推理驱动、MIPI多路相机驱动、RTOS实时系统、轻量化图像算子库。主打离线AI、多摄、工业实时视觉,是目前替代OpenMV、低端Linux视觉板的最优方案。
4. RDK-X5专属技术栈
地平线BPU工具链、ROS2机器人生态、双目深度算法、多模型并行推理、Linux多媒体流水线。主打机器人3D视觉、多模态智能。
5. 树莓派专属技术栈
MediaMTX/go2rtc流媒体网关、Frigate AI-NVR、HomeAssistant生态集成、Linux全功能服务部署。主打系统集成、存储、转发、后台服务。
五、硬件组合方案
- 极简家用AI监控:ESP32-CAM(RTSP推流)+ 树莓派(go2rtc+Frigate AI录像)
- 离线工业智能相机:K230单机(采集+AI推理+IO控制,断网可用)
- 高端AI联网IPC:K230(本地AI)+ ESP32-S3(网络推流+ONVIF)+ 树莓派(NVR存储)
- 双目机器人系统:K230(前端目标检测)+ RDK-X5(ROS导航+SLAM避障)
- 超低功耗野外抓拍:ESP32-CAM(主力)/ K230(智能筛选)+ LoRa/4G模块
六、选型结论
-
追求极致低成本、低功耗、无线采集 → 选 ESP32-CAM
-
追求离线本地AI、工业机器视觉、电池智能设备 → 选 K230(嵌入式AI视觉最优解)
-
做机器人、双目3D、ROS导航、多模态AI → 选 RDK-X5
-
做流媒体网关、NVR存储、系统集成、后台服务 → 选 树莓派
-
完整商用视觉系统:四平台分层协作,形成"采集+AI感知+机器人决策+云端后台"的完整嵌入式视觉解决方案。
七、总结
嵌入式视觉开发不存在"万能硬件",各平台各司其职、分层互补。ESP32-CAM解决采集与联网低功耗 问题,K230解决前端本地化AI推理 问题,RDK-X5解决机器人3D智能感知 问题,树莓派解决系统服务与集成问题。