基于 ALINX VD100 的 Simulink 图像处理实践
原文作者:Adam Taylor
原文标题:MicroZed Chronicles: Creating Image Processing with Simulink
原文链接:https://www.adiuvoengineering.com/post/microzed-chronicles-creating-image-processing-with-simulink
Github 链接:https://github.com/ATaylorCEngFIET/mz629
FPGA 大神、Ardiuvo & Hackster.IO 知名博主 Adam Taylor 此前 基于 ALINX VD100(AMD Versal AI Edge VE2302)开发平台实现 LCD 测试图案显示。
最近,他对这个项目进行了升级:增加 ALINX 摄像头模块 ,并构建完整的图像处理流水线,实现实时视频采集与显示。
由于 LCD 显示输出链路已经搭建完成,本次升级的重点主要集中在视频采集和图像处理部分。
项目硬件清单
本项目基于 ALINX VD100 Versal AI Edge 开发平台搭建,实现了从摄像头采集、图像处理到显示输出的完整视频处理链路。
| 类别 | 硬件型号 | 作用 |
|---|---|---|
| 主开发平台 | ALINX VD100 | 项目开发与验证平台 |
| 核心器件 | AMD Versal AI Edge VE2302 | 图像采集、处理及系统控制 |
| 摄像头 | ALINX MIPI Camera Module | 图像采集输入 |
| 显示设备 | 1280×720 LVDS LCD Panel | 图像显示输出 |
| 存储器 | 板载 4GB DDR4 | 视频帧缓存 |
| 非易失存储 | 8GB eMMC、512Mb QSPI Flash | 系统启动与程序存储 |

(AMD Versal自适应计算加速平台开发板VD100)
系统架构
text
ALINX MIPI Camera
↓
MIPI CSI-2 RX
↓
Sensor Demosaic
↓
VDMA Write
↓
DDR4 Frame Buffer
↓
VDMA Read
↓
Sobel Edge Detection IP
↓
LVDS LCD Display构建视频采集链路
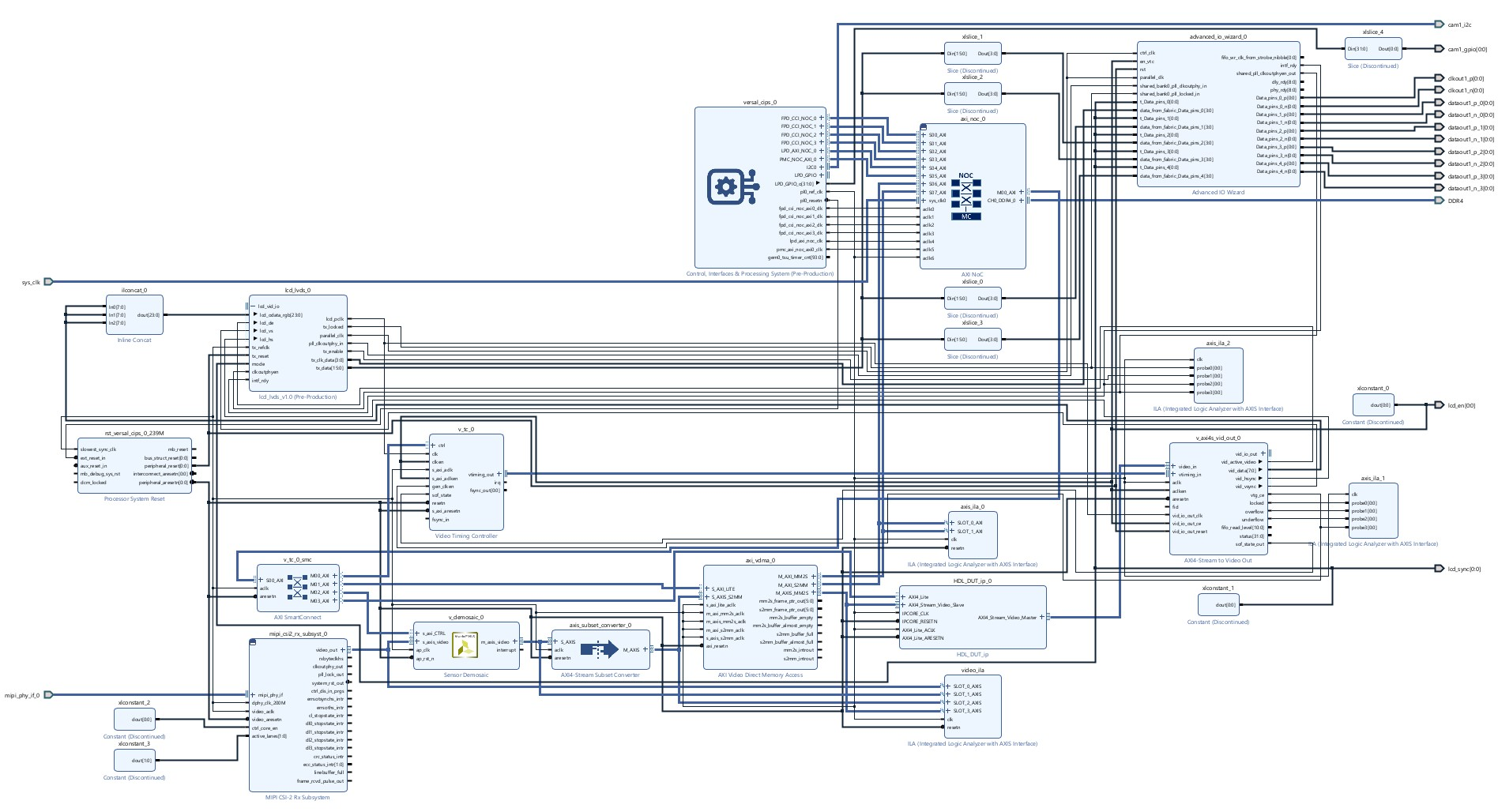
要实现摄像头视频采集,需要在设计中加入以下 IP 核:
MIPI CSI-2 RX Subsystem
配置参数如下:
- 4 Lane 输入
- RAW10 图像格式
- 每个时钟周期输出 4 个像素
该模块负责接收来自 MIPI 摄像头的数据流。
Sensor Demosaic
配置参数:
- 4 Pixels Per Clock
- RAW10 输入
该模块用于完成 Bayer 图像的去马赛克处理,将图像传感器输出转换为标准 RGB 图像。
Video DMA(VDMA)
通过 NoC(Network on Chip)连接 DDRMC,实现:
- 视频帧写入 DDR
- 视频帧读取 DDR
从而完成帧缓存管理。
CIPS I2C(EMIO)
启用 EMIO 方式的 I2C 接口,用于:
- 摄像头初始化
- 摄像头参数配置
例如曝光、增益、分辨率等参数设置。
完成上述模块连接后,就建立起了一条完整的视频链路:
MIPI Camera → Demosaic → DDR Buffer → LCD Display
与此同时,还需要 Vitis 软件完成:
- 摄像头配置
- 图像处理 IP 配置
- VDMA 控制
整个系统设计已发布在 Adam Taylor 的 GitHub 中,点击文末阅读原文即可跳转。
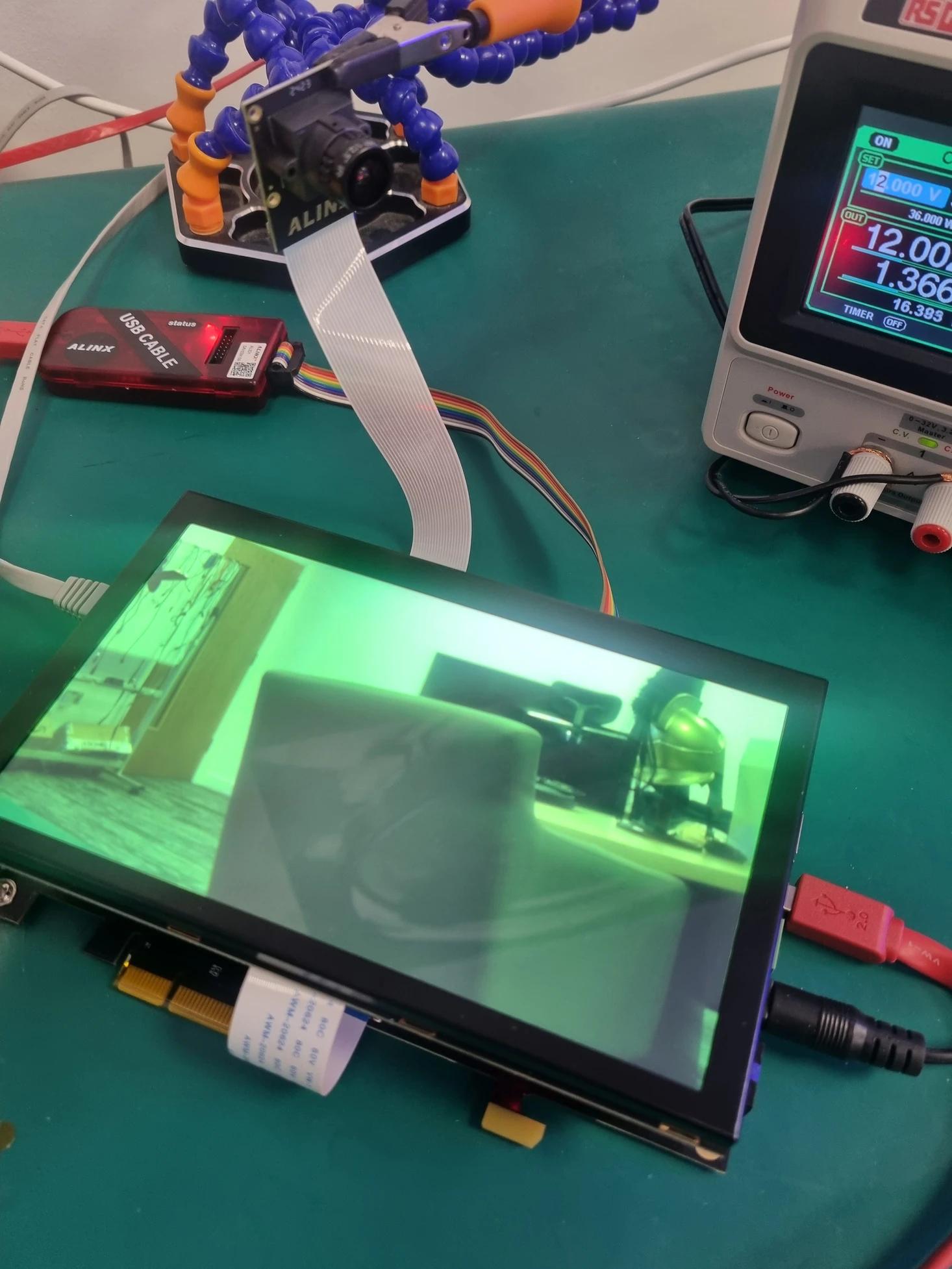
原始图像存在的问题
系统运行后,摄像头采集的画面已经能够正常显示到 LCD 上。
不过从显示效果来看,仍然存在两个比较明显的问题:
- Gamma 校正不足
- 白平衡未优化
因此图像质量还有进一步优化空间。
使用 Simulink 实现 Sobel 边缘检测
在完成视频采集与显示后,希望快速验证一个能够插入现有视频流水线的图像处理算法。
最终选择的是:
Sobel Edge Detection(Sobel 边缘检测)
并通过 MathWorks Simulink HDL Coder 自动生成 FPGA IP。
创建 HDL 子系统
首先在 Simulink 中建立一个新的 Subsystem,后续通过 HDL Coder 转换为 Vivado IP。
由于 Sobel 算法需要灰度图像作为输入,因此第一步需要实现:
RGB 转灰度
text
RGB Image
↓
Grayscale Conversion
↓
Sobel Processing即把彩色图像转换为灰度图像后,再进行边缘检测处理。
AXI4-Stream 视频接口设计
整个模块采用标准 AXI4-Stream Video 接口。
输入数据包括
tData
24bit 像素数据:
- R:8bit
- G:8bit
- B:8bit
组成一个 RGB888 像素。
控制信号
- tUser
- tLast
用于表示帧起始 和行结束等视频时序信息。
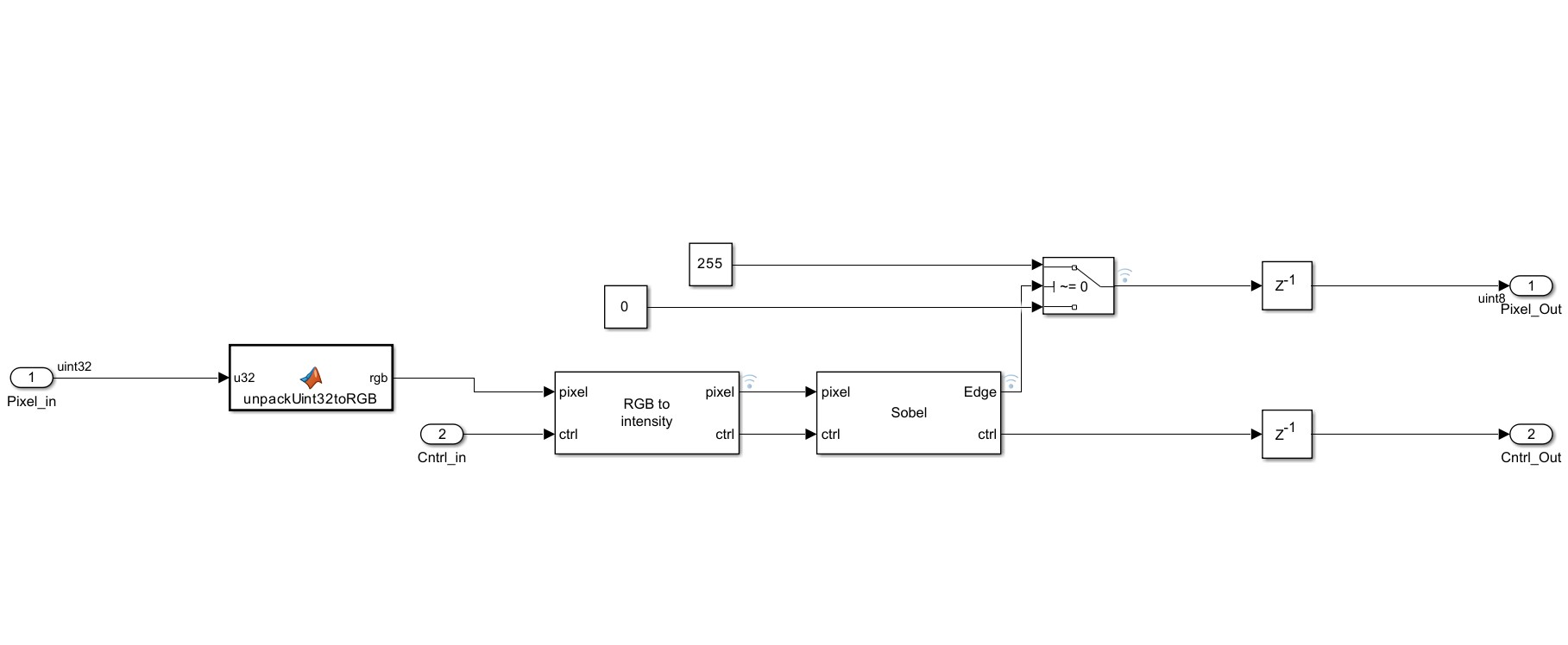
Sobel 算法处理流程
完成灰度转换后,图像进入 Sobel 运算模块。
Sobel 算法会输出边缘检测结果。
通过 Switch 模块完成二值化:
- 检测到边缘 → 输出 255
- 非边缘区域 → 输出 0
最终生成黑白边缘图像。
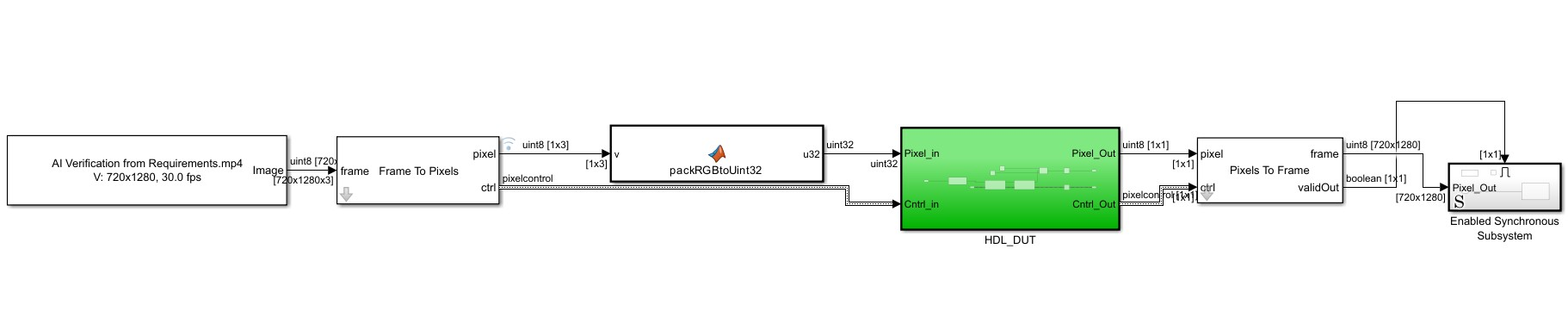
Simulink 仿真验证
为了在 FPGA 实现之前验证算法效果,可以先在 Simulink 进行视频仿真。
输入端采用 From Multimedia File 读取视频文件。
随后利用 Frame To Pixels 将视频帧转换为:
- 像素流
- 视频同步信号
模拟真实视频接口的数据格式。
输出端通过 Pixels To Frame 重新组合图像帧。
重新组装视频帧。
并利用 Video Viewer 查看处理结果。
AXI4-Stream 数据格式转换
这里遇到一个比较典型的问题。
Frame To Pixels 输出格式为uint8[1×3]即[R G B]三个独立的 8bit 数据。
而 AXI4-Stream 接口要求输入格式为uint32 单一数据输入。
因此需要增加一个 MATLAB Function:将 RGB 数据打包为单个 32 位数据(uint8[1x3]→uint32)。由于 MATLAB 不支持 24bit 数据类型,因此只能采用 uint32 作为替代方案。
在 HDL 模块入口处,再执行相反操作:uint32 → uint8[1x3] 恢复RGB数据。

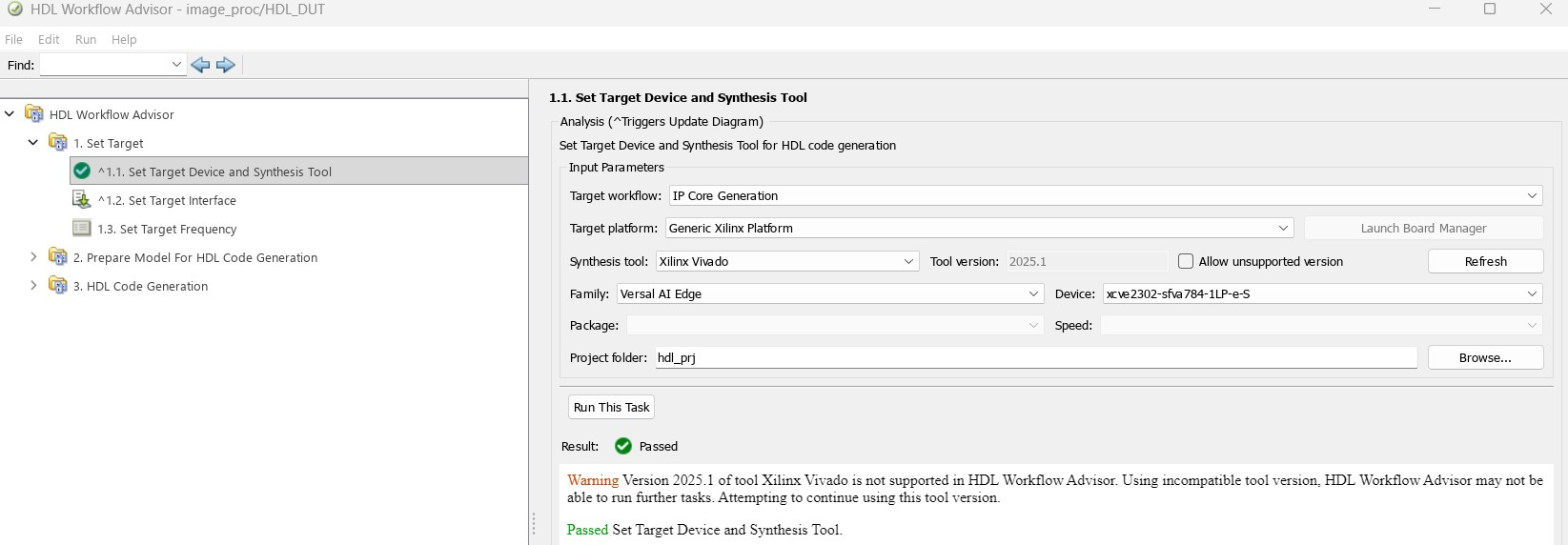
自动生成 Vivado IP
完成仿真验证后,通过 HDL Coder 直接生成 Vivado IP。
生成内容包括:
- RTL HDL
- AXI4-Stream 接口
- Vivado IP Packager 文件
- 工程支持文件
开发者可以直接导入 Vivado 使用。
集成到 VD100 视频流水线
生成的 Sobel IP 被加入到 Vivado 工程中。
由于该模块采用:
单像素处理(1 Pixel Per Clock)
因此放置在 VDMA 输出端之后
资源占用情况
| 资源类型 | 使用量 |
|---|---|
| DSP | 5 |
| LUT | 941 |
| Flip-Flop | 1606 |
工作频率:200 MHz
在 Versal AI Edge VE2302 上实现时序收敛没有任何问题。

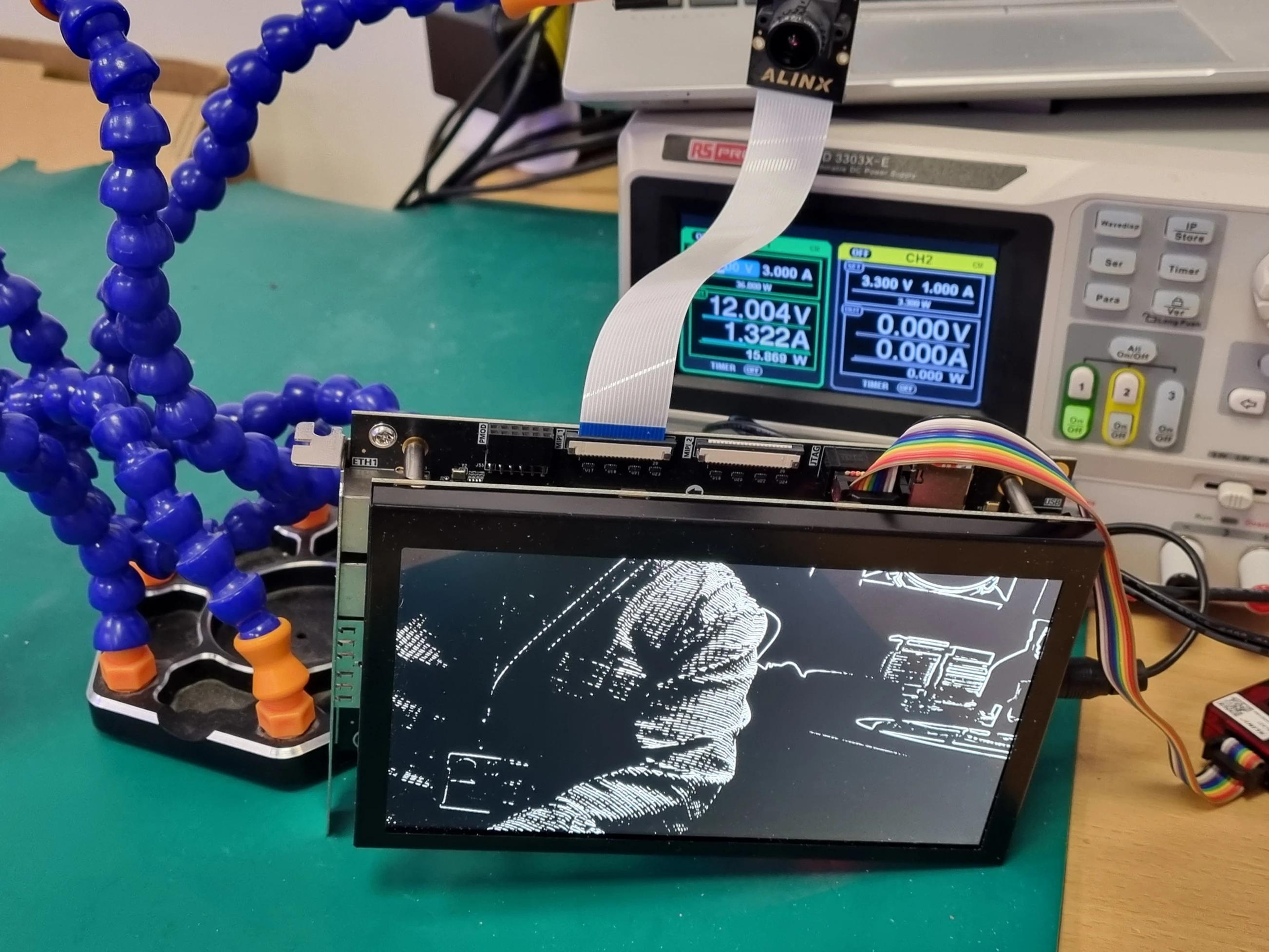
实际运行效果
修改 Vitis 软件,使其能够配置 Sobel 模块后,系统成功运行。
实时摄像头画面经过 FPGA 处理后实现了完整的实时边缘检测演示系统:
- 实时摄像头采集
- FPGA 边缘检测处理
- LCD 实时显示
显示刷新率达到 60Hz