TWIST2代码:https://github.com/amazon-far/TWIST2
GMR代码: https://github.com/YanjieZe/GMR
PICO开发:https://github.com/XR-Robotics
1. Miniconda3
bash
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O /tmp/miniconda.sh
bash /tmp/miniconda.sh -b -p $HOME/miniconda3
source ~/miniconda3/bin/activate
conda init bash
# 接受服务条款
conda tos accept --override-channels --channel https://repo.anaconda.com/pkgs/main
conda tos accept --override-channels --channel https://repo.anaconda.com/pkgs/r2. 创建 gmr conda 环境 (Python 3.10)
bash
conda create -n gmr python=3.10 -y
conda activate gmr3. 克隆并安装 GMR(运动重定向核心)
bash
# 某个地址
git clone https://github.com/YanjieZe/GMR.git
pip install -e GMRGMR 安装时会自动安装以下 pip 包:
| 包名 | 用途 |
|---|---|
| mujoco | 物理仿真 |
| numpy | 数值计算 |
| scipy | 旋转变换 |
| redis | Redis 通信 |
| rich | 终端美化 |
| opencv-python | 图像处理 |
| loop_rate_limiters | 帧率限制 |
| torch | 深度学习 |
4. 安装并配置 Redis Server
bash
sudo apt update
sudo apt install -y redis-server
# 编辑配置
sudo sed -i 's/^bind .*/bind 0.0.0.0/' /etc/redis/redis.conf
sudo sed -i 's/^protected-mode .*/protected-mode no/' /etc/redis/redis.conf
# 启动
sudo systemctl enable redis-server
sudo systemctl restart redis-server
# 验证
redis-cli ping # 应返回 PONG5. XRobot PICO SDK
5.1 PC开发电脑环境搭建 ubuntu 22.04
bash
# 1. 安装 PC Service (deb)
wget https://github.com/XR-Robotics/XRoboToolkit-PC-Service/releases/download/v1.0.0/XRoboToolkit_PC_Service_1.0.0_ubuntu_22.04_amd64.deb
sudo dpkg -i XRoboToolkit_PC_Service_1.0.0_ubuntu_22.04_amd64.deb
# 2. 编译安装 Python SDK
sudo apt install -y cmake build-essential python3-dev pybind11-dev
cd /home/dongbu/code
git clone https://github.com/YanjieZe/XRoboToolkit-PC-Service-Pybind.git
cd XRoboToolkit-PC-Service-Pybind
mkdir -p tmp && cd tmp
git clone https://github.com/XR-Robotics/XRoboToolkit-PC-Service.git
cd XRoboToolkit-PC-Service/RoboticsService/PXREARobotSDK
bash build.sh
cd ../../../..
mkdir -p lib include
cp tmp/XRoboToolkit-PC-Service/RoboticsService/PXREARobotSDK/PXREARobotSDK.h include/
cp -r tmp/XRoboToolkit-PC-Service/RoboticsService/PXREARobotSDK/nlohmann include/nlohmann/
cp tmp/XRoboToolkit-PC-Service/RoboticsService/PXREARobotSDK/build/libPXREARobotSDK.so lib/
conda install -c conda-forge pybind11 -y
python setup.py install安装好后,ubuntu会出现应用, xrobotoolkit-pc-service
等待pico链接
5.2 PICO 头显安装 App 说明
PICO 端需要安装 XRoboToolkit Unity Client,这是一个 Unity 构建的 Android APK,用于将 PICO 头显的姿态数据传输到 PC。
下载 APK
从 GitHub Releases 页面下载最新的 APK:
https://github.com/XR-Robotics/XRoboToolkit-Unity-Client/releases/
PICO 开发者模式(如未开启)
- PICO 头显内:设置 → 通用 → 关于本机 →
连续点击「软件版本号」7 次,开启开发者模式 - 设置 → 通用 → 开发者选项 → 开启「USB 调试」
开发电脑通过 ADB 安装 APK (有线将pico和开发机连接)
bash
# 1. 安装 adb(如果未安装)
sudo apt install -y adb
# 2. USB 连接 PICO 头显到 PC,验证连接
adb devices
# 应输出类似:XXXXXXXX device
# 3. 安装 APK
adb install XRoboToolkit-PICO-1.1.1.apk配置与使用
App 安装后在 PICO 应用库中出现 XRoboToolkit
运行脚本
连接使用步骤
- 确保 PC 和 PICO 在同一局域网
- PC 端启动
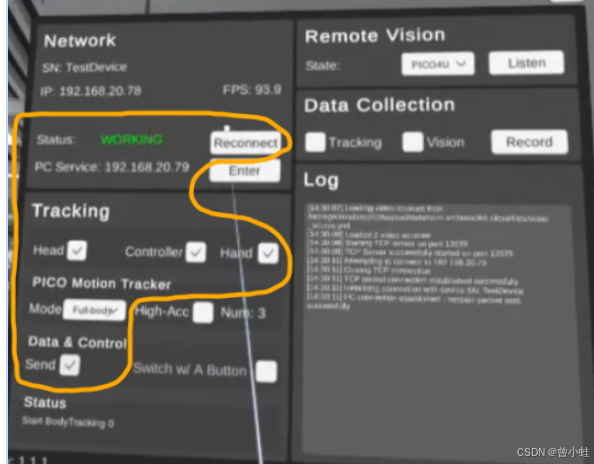
xrobotoolkit-pc-service(GUI 应用,会显示本机 IP) - PICO 端穿戴好体感跟踪传感器,并校正(最少是双腿)
- PICO 端启动 XRoboToolkit App
- 在 App 中输入 PC 的 IP 地址并连接
- 开始流式传输全身和手部数据
- PC 端运行
bash teleop.sh
bash
cd twist2
bash teleop.sh