一:前言
最近手上压了一块米联客的Miz7035,一块xilinx zynq-7000系列的开发板,想着正好学习一下linux在ARM9上的移植,网上基本都是ZC702、zed的教程,这对于买了非标准板的人来说就不太友好,很多文件都不知道是怎么生成的。本着学习加分享的心态,把这两天移植linux的过程写下来,尽可能详细。驱动和系统移植不是我的专长,很多地方我也是知其然不知其所以然,写得不对的地方欢迎指正。
二:前期准备
1、一台安装好linux系统的主机,我安装的是centos7.2.
2、一块zynq-7000系列的FPGA开发板,我手上的是米联客miz7035,其他zynq系列一样通用。
3、vivado开发环境,我安装的2018.2版本
4、u-boot,device-tree,kernel下载。地址分别是:https://github.com/Xilinx/u-boot-xlnx (u-boot)、https://github.com/Xilinx/linux-xlnx(kernel)、https://github.com/Xilinx/device-tree-xlnx(device-tree)。
5、根文件系统,这里我裂墙推荐Debian,Debian这个Linux系统,底层非常稳定,内核和内存的占用都非常小,下载地址:rootfs.tar.gz_免费高速下载|百度网盘-分享无限制
三:操作步骤
1.设置交叉编译环境
因为最终运行在arm9上,所以uboot、内核,文件系统编译都需要用arm-linux交叉编译工具,zynq2000使用的是arm-linux-gnueabihf,交叉编译工具可以从网上单独下载,也可直接使用vivado自带的交叉编译工具。使用方法也很简单
source /opt/Xilinx/SDK/2018.2/settings64.sh或者
gedit /opt/Xilinx/SDK/2018.2/.settings64-SDK_Core_Tools.sh将该文件中的内容全部复制到bashrc,更新环境变量,这样在新的终端中打开,环境变量也不会消失。
2.u-boot编译
进入u-boot文件夹,
make distclean //清除配置文件和编译中间结果
make CROSS_COMPILE=arm-linux-gnueabihf- zynq_mz7x_defconfig //重新配置,生成makefile,具体板子不一样,在U-Boot/configs文件夹下
make CROSS_COMPILE=arm-linux-gnueabihf- tools //编译开发所需要的工具
make CROSS_COMPILE=arm-linux-gnueabihf- //编译,完成后生成一个elf文件u-boot,uboot.bin,u-boot.srec等文件最后把编译生成的u-boot后缀改成.elf,连同u-boot.img和spl/boot.bin,一共三个文件拷贝出来。
3.kernel内核编译
export PATH=${YOUR_UBOOT_DIR}/tools:$PATH //编译内核如果要生成uImage,则需要用到mkimage工具,该工具在u-boot/tools下有提供make distclean //清除配置文件和编译中间结果
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- xilinx_mz7x_defconfig //重新配置,生成makefile
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- prepare scripts //编译开发所需要的工具
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- UIMAGE_LOADADDR=0x8000 uImage //编译内核,且生成uImage最后把{KERNEL_DIR}/arch/arm/boot/zImage,{KERNEL_DIR}/arch/arm/boot/uImage拷贝出来。
*# zImage - compressed kernel image
uImage - zImage plus U-Boot header
uImage是在zImage之前加上一个长度为0x40的"头",说明这个映像文件的类型、加载位置、生成时间、大小等信息。换句话说,如果直接从uImage的0x40位置开始执行,zImage和uImage没有任何区别。*
4、设备树编译
经过内核编译,在kernel文件夹下script/dtc中有编译好的设备树编译工具
cd kernel/scripts/dtc
./dtc -I dts -O dtb -o devicetree.dtb /FPGA工程目录/SDK目录/device_tree_bsp_0/system-top.dts //dts为sdx工程中生成,编译后在当前目录下生成一个名为devicetree.dtb)。5. 编译并安装内核模块,更新文件系统
本文提供的rootfs是已经编译好的,如果想要重新编译或者更新文件系统,可以下载后解压,然后执行以下步骤
cd your_downlood_kernel_dir //打开编译好的内核文件夹
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- modules //编译内核模块,
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- modules_install INSTALL_MOD_PATH=../rootfs // 在上一步打开的终端中,重新安装内核模块,安装路径为解压出来的rootfs路径
tar -cvzf rootfs.tar.gz rootfs。//将安装好内核模块的根文件系统重新压缩6.生成启动镜像文件
制作启动镜像需要用到三个文件:fsbl.elf、system.bit和第二步生成的u-boot.elf。
打开SDK工具,生成fsbl的方法网上很多,自己查阅,不赘述了,这里只介绍如何制作boot image
在fsbl工程目录上右键选择Create Boot Image
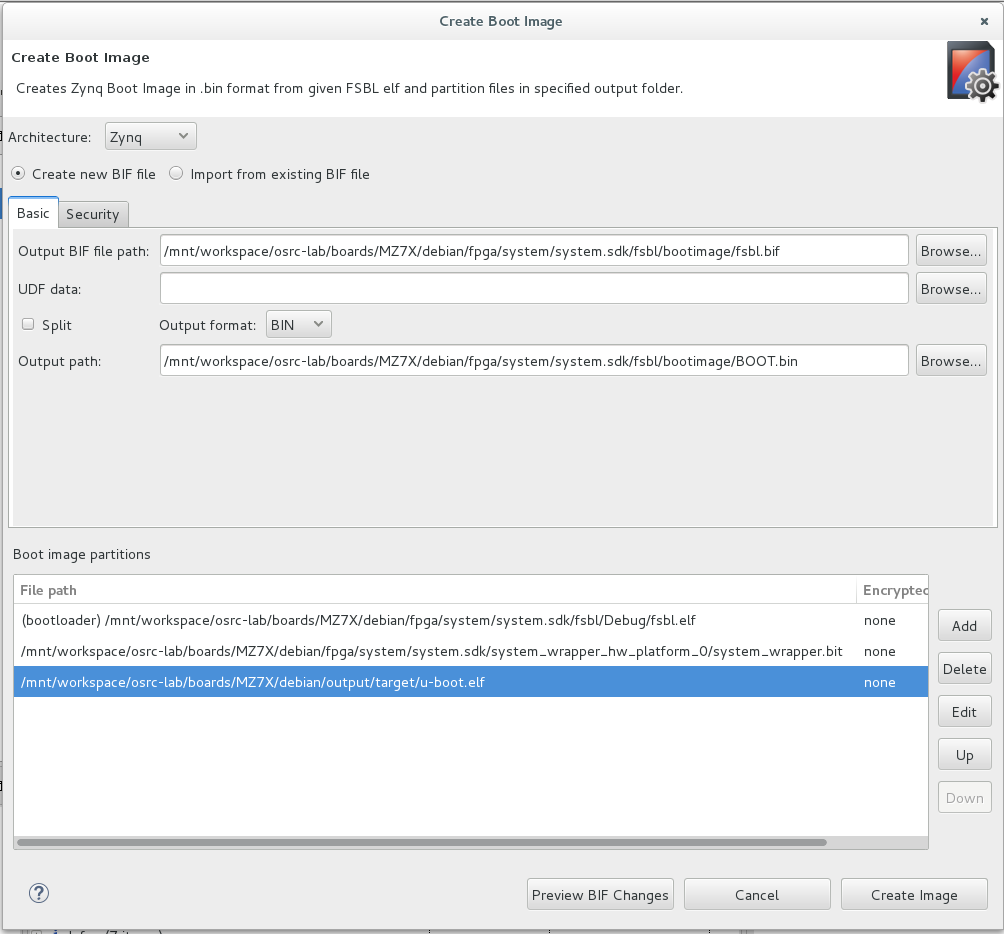
加入u-boot.elf的路径,然后Create Image,就会在指定的输出路径上生成BOOT.bin
7.设置UBOOT环境变量
新建一个uEnv.txt,输入内容:
optargs=console=tty0 consoleblank=0 vt.global_cursor_default=0这部分不是很懂,有清楚的请留言。
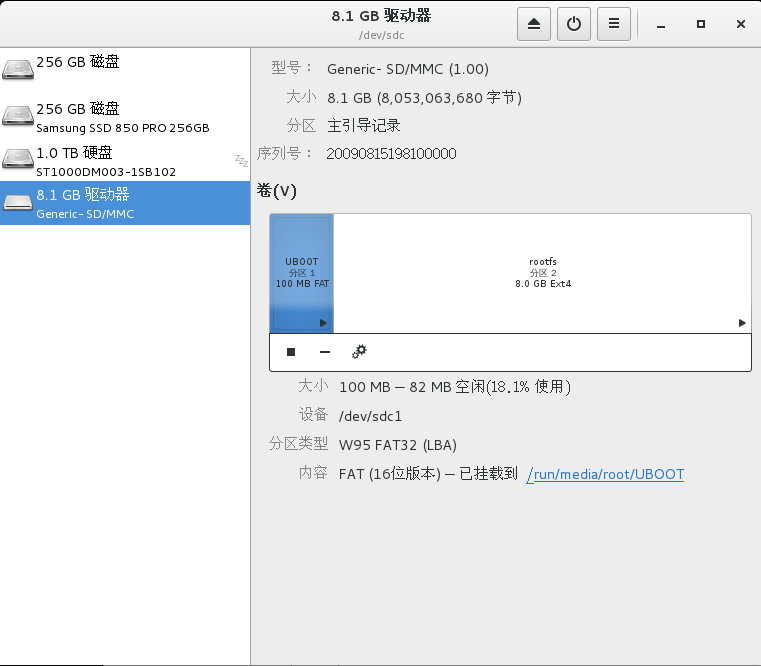
8.制作SD卡
找一张SD卡,通过系统自带的磁盘工具,首先格式化。然后创建两个分区,一个100M FAT格式,命名为UBOOT,剩余的8G ext4格式,命名为rootfs。如图所示:
将步骤6、7、4、3生成的BOOT.bin、uEnv.txt、devicetree.dtb、uImage拷贝到UBOOT分区下
将步骤5生成的rootfs.tar.gz解压到rootfs分区下。
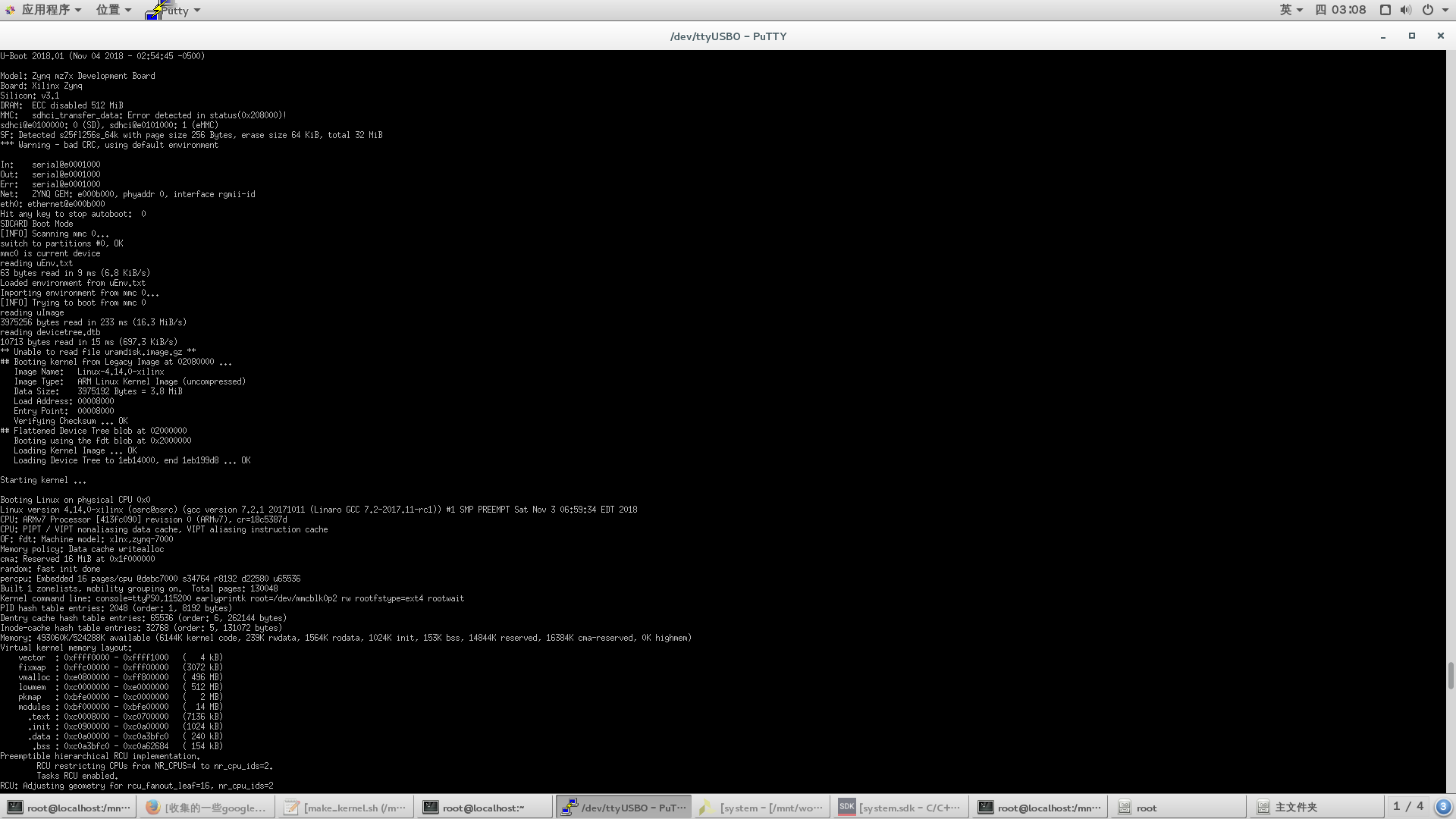
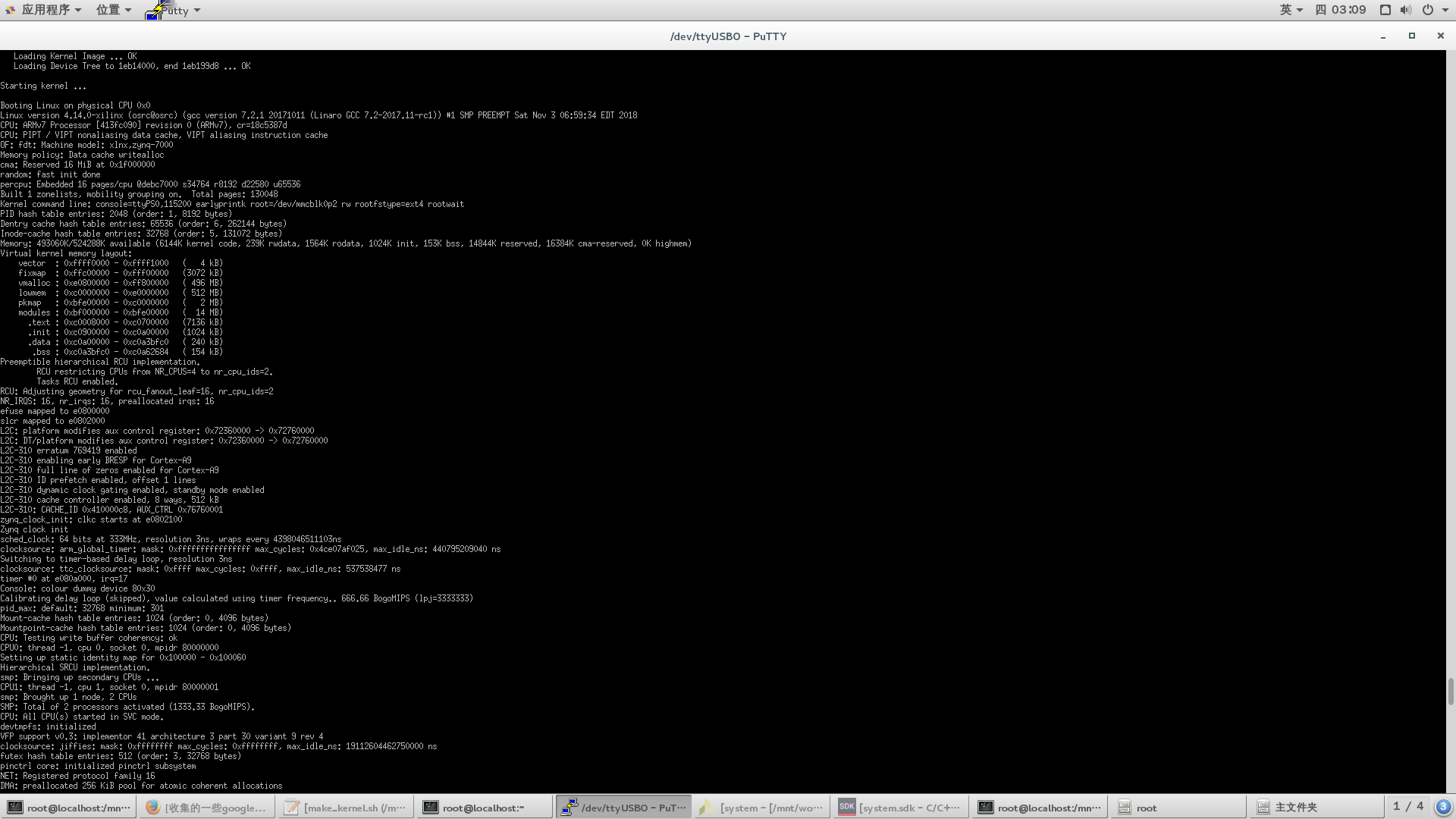
四:实验结果
五、结束语
至此,debian在zynq上的移植全部结束,之后,我将分享如何在linux基础上开发字符驱动,以及如何运行QT程序,并通过一个摄像头采集的例子作为具体应用