目录
1.摘要
针对无人机在协作地形覆盖任务中的多回路路径规划问题,本文提出一种随机加减算法(A&D),通过初始化、回路更新和最短路径计算,在满足覆盖率的前提下最小化航线总长。针对禁飞区动态变化,设计了引入过渡点的分层在线局部调整策略。仿真表明,该算法在回路生成和应对突发状况上均优于主流算法。
2.三维地形覆盖任务路线规划模型
持续覆盖任务
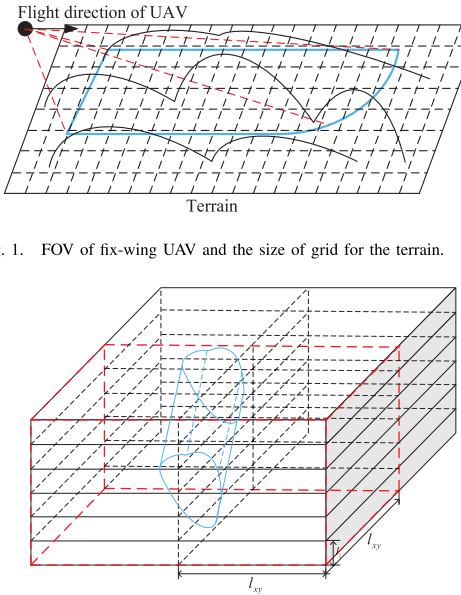
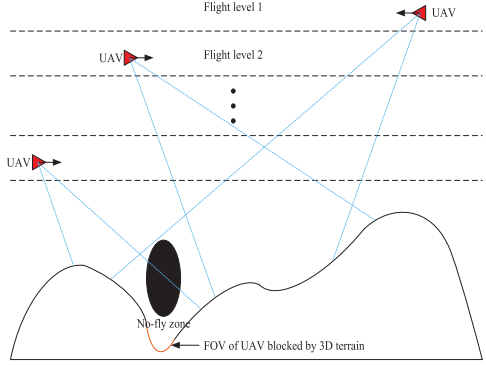
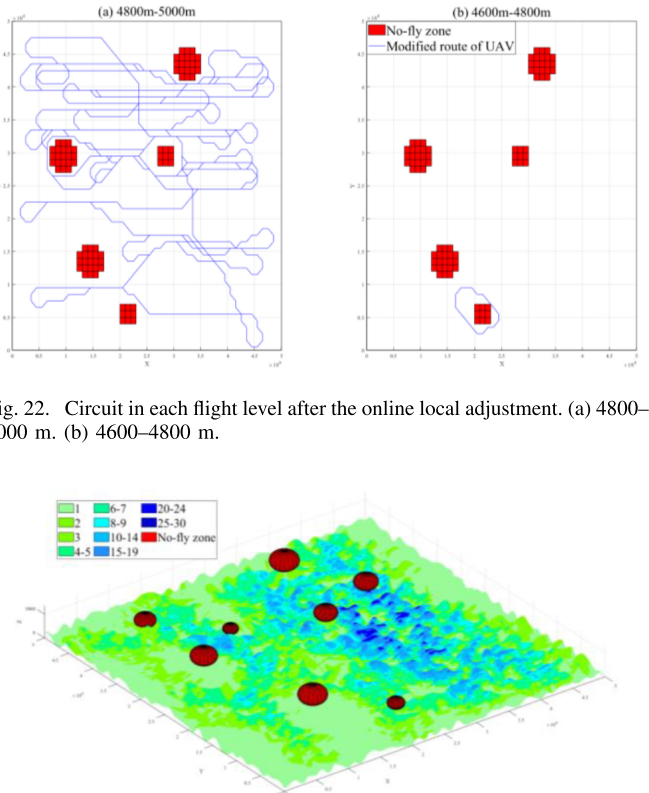
本文将三维空间离散化为长宽远大于高度长方体网格,将不规则禁飞区近似化为网格组合。针对地形起伏导致频繁变高效率低的问题,提出多无人机分层飞行模式,每架无人机仅在由相邻两个高度组成的高度层内飞行。
数学建模
为实现 persistent 覆盖,通过定义三维状态数组 P a × b × c P_{a\times b\times c} Pa×b×c决策网格是否属于航线。在满足最小覆盖率(MCR)的约束下,通过多机协同减少重复覆盖,最小化所有无人机回路总长度:
J = ∑ i = 1 N U C i J=\sum_{i=1}^{N_U}C_i J=i=1∑NUCi
其中, N U N_U NU为无人机数量, C i C_i Ci 为第 i i i 架无人机的回路长度。
3.协作覆盖路径规划算法
网格可选状态与航点访问顺序
在确定同层航点访问顺序时,为避免大规模TSP高额计算开销,采用改进扫掠式方法:无人机沿轴向逐列覆盖,遭遇禁飞区时通过局部绕行进行规避,最终依次生成各层无人机的完整闭合回路。
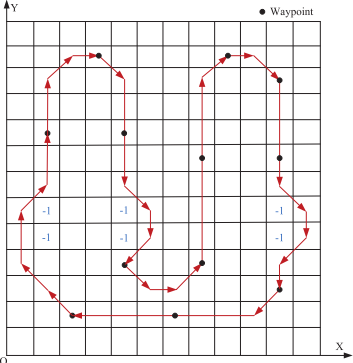
可行回路初始化
可行回路初始化通过逐层随机加点与冗余剔除实现。先随机选三点构建初始回路,再持续随机引入满足可飞性且能增加覆盖率的备选航点,直至达标或启用新高度层。随后遍历回路,剔除不降低覆盖率且不破坏回路闭合的冗余航点,最终用改进扫掠法连接余下航点生成闭合回路。
各高度层回路更新
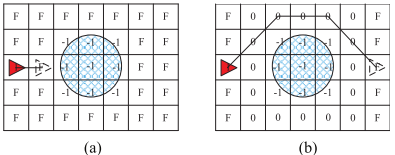
通过开启和关闭算子更新回路:开启算子将状态0转1以增设航点,关闭算子将1转0以剔除航点,均在满足覆盖率约束下执行。
航点约束A*算法
在A* 算法基础上修改节点扩展规则满足转弯约束的两点间最短航线。备选节点入选Open表须同时满足:处于当前高度层且非禁飞区;与前续航段转弯角小于 ϕ \phi ϕ且非后续无路可走死节点,在与终点重合时,切入方向须满足后续航段的转弯约束。
4.在线回路规划局部调整
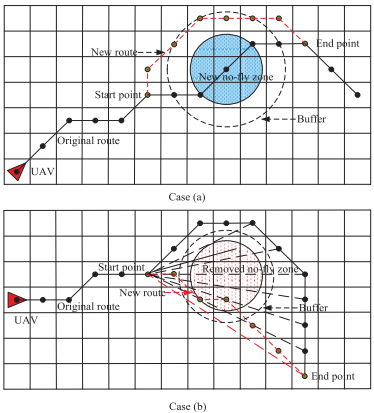
在线局部调整策略通过动态更新环境网格响应变化。突发新禁飞区时,以原航线上受影响的起止航点为边界重划航线;禁飞区消失时,通过射线交点校验截取可优化航段。为应对无解或覆盖率下降,采用分层调整:若两点间无可行解,则向前后外扩原航点直至联通;若新航线导致覆盖率不足,则引入过渡点平衡距离与增益。
5.结果展示
6.参考文献
Wu Y, Yin H, Chen X, et al. Multicircuit route planning for UAVs performing the terrain coverage taskJ. IEEE Internet of Things Journal, 2024, 11(13): 23765-23779.
7.算法辅导·应用定制·读者交流
xx