捕获
TIM5属于APB1时钟树,外部晶振HSE为8MHz,通过倍频给到TIM5的时钟频率为84MHz
Plain
HSE 8MHz → PLL(M=8, N=336, P=2) → SYSCLK 168MHz
↓
APB1 ÷4 → PCLK1 42MHz
↓
TIM5 ×2 → 84MHz初始化TIM5:开启外设时钟、GPIO 配置、时基配置、输入捕获配置、NVIC 中断配置、启动定时器
C
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource0, GPIO_AF_TIM5);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = 0xFFFFFFFF;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM5, &TIM_TimeBaseStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x03;
TIM_ICInit(TIM5, &TIM_ICInitStructure);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM5, ENABLE);TIM5时基配置,0xFFFFFFFF 是TIM5的自动重装值(ARR / Period),也就是计数器能数到的最大值
| 参数 | 值 | 作用 |
|---|---|---|
| Period | 0xFFFFFFFF | 自动重装值设为最大,计数器从 0 数到约 51 秒才溢出(84 MHz 下) |
| Prescaler | 0 | 实际分频 = 0+1 = 1,计数时钟 = 84 MHz |
| CounterMode | 向上计数 | 每个时钟 +1 |
| ClockDivision | DIV1 | 不影响捕获时钟,只影响采样延迟 |
计数中断
SQL
void TIM5_IRQHandler(void)
{
uint32_t cap_now;
uint32_t period;
if (TIM_GetITStatus(TIM5, TIM_IT_CC1) != RESET)
{
TIM_ClearITPendingBit(TIM5, TIM_IT_CC1);
cap_now = TIM_GetCapture1(TIM5);
if (s_cap_has_last)
{
if (cap_now >= s_cap_last)
{
period = cap_now - s_cap_last;
}
else
{
period = (0xFFFFFFFFu - s_cap_last) + cap_now + 1u;
}
if (period > 0u)
{
g_measured_period_ticks = period;
g_measured_freq_hz = IC_TIM_CLK_HZ / period;
g_capture_valid = 1;
}
TIM_ITConfig(TIM5, TIM_IT_CC1, DISABLE);
}
s_cap_last = cap_now;
s_cap_has_last = 1;
}
}启动定时器捕获测量
C
void IC_Capture_Start(void)
{
s_cap_last = 0;
s_cap_has_last = 0;
TIM_SetCounter(TIM5, 0);
TIM_ClearITPendingBit(TIM5, TIM_IT_CC1);
TIM_ITConfig(TIM5, TIM_IT_CC1, ENABLE);
}
IC_Capture_Configuration();
IC_Capture_Start();波形
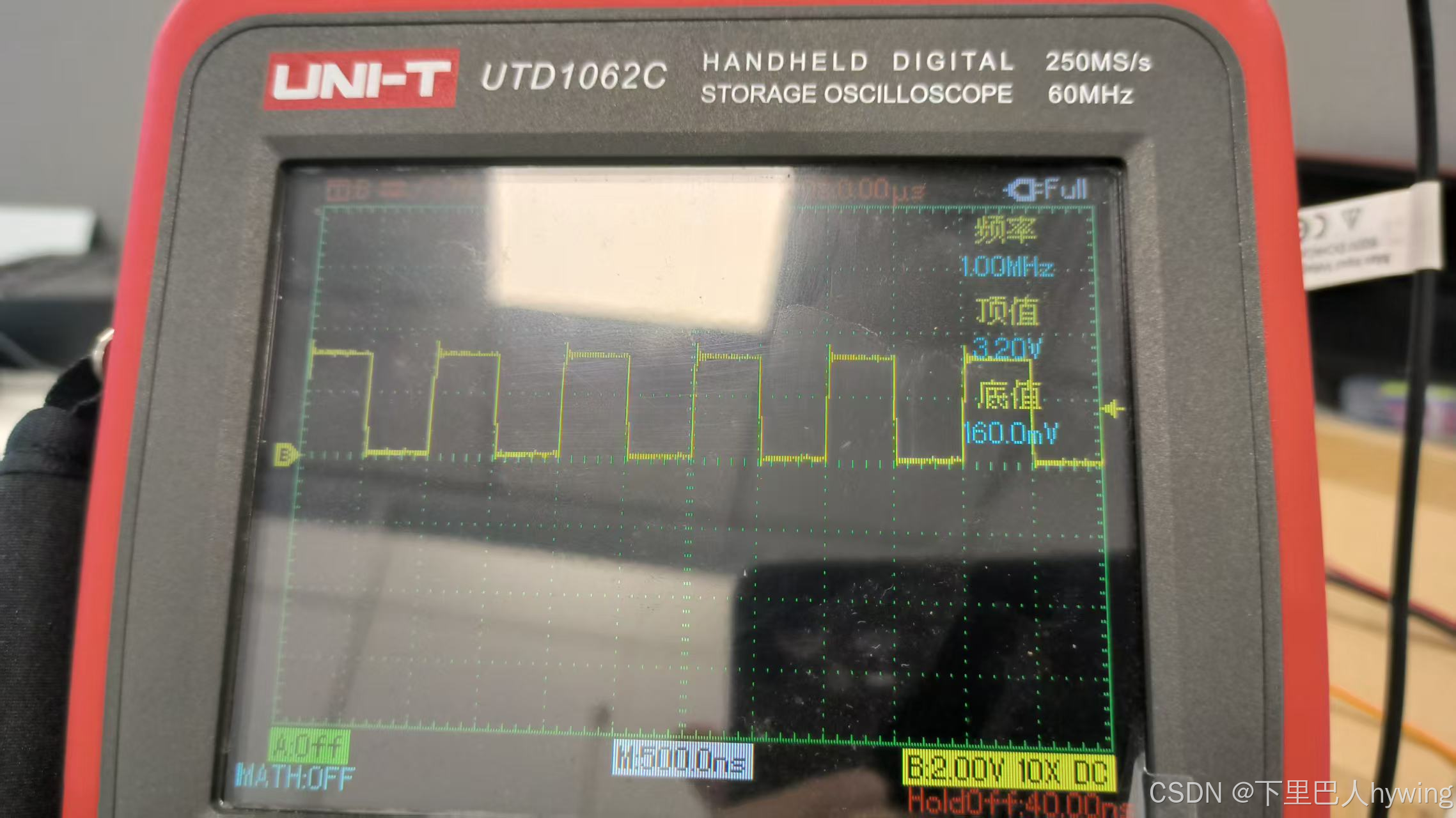
我们用TIM14生成1MHz,TIM14和TIM5同样属于APB1总线,复用PF9引脚生成1MHz波形
C
void TIME_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM14, ENABLE);
GPIO_PinAFConfig(GPIOF, GPIO_PinSource9, GPIO_AF_TIM14);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOF, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = s_presets[0].period - 1u;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM14, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = s_presets[0].pulse;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM14, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM14, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM14, ENABLE);
TIM_Cmd(TIM14, ENABLE);
TIME_SetFreqMode(FREQ_MODE_0P9MHZ);
}测量
示波器
STM32串口打印
