电机驱动开发学习1. 直流无刷电机介绍
- [一、 直流无刷电机](#一、 直流无刷电机)
- 二、直流无刷电机的重要参数
-
- [1. 电气参数](#1. 电气参数)
-
-
- [额定电压(Rated Voltage)](#额定电压(Rated Voltage))
- [额定电流(Rated Current)](#额定电流(Rated Current))
- [额定功率(Rated Power)](#额定功率(Rated Power))
- [相电阻(Phase Resistance)](#相电阻(Phase Resistance))
- [相电感(Phase Inductance)](#相电感(Phase Inductance))
- [反电动势常数(Back EMF Constant, Ke)](#反电动势常数(Back EMF Constant, Ke))
- [转矩常数(Torque Constant, Kt)](#转矩常数(Torque Constant, Kt))
-
- [2. 机械参数](#2. 机械参数)
-
-
- [额定转速(Rated Speed)](#额定转速(Rated Speed))
- [最高转速(Maximum Speed)](#最高转速(Maximum Speed))
- [额定转矩(Rated Torque)](#额定转矩(Rated Torque))
- [峰值转矩(Peak Torque / Stall Torque)](#峰值转矩(Peak Torque / Stall Torque))
- [极对数(Pole Pairs)](#极对数(Pole Pairs))
- [转动惯量(Moment of Inertia)](#转动惯量(Moment of Inertia))
-
- [3. 性能参数](#3. 性能参数)
-
-
- 效率(Efficiency)
- [空载电流(No-load Current)](#空载电流(No-load Current))
- [空载转速(No-load Speed)](#空载转速(No-load Speed))
- [温升(Temperature Rise)](#温升(Temperature Rise))
- [热阻(Thermal Resistance)](#热阻(Thermal Resistance))
-
- [4. 其他重要参数](#4. 其他重要参数)
-
-
- KV值(速度常数)
- [电气时间常数(Electrical Time Constant)](#电气时间常数(Electrical Time Constant))
- [机械时间常数(Mechanical Time Constant)](#机械时间常数(Mechanical Time Constant))
- [齿槽转矩(Cogging Torque)](#齿槽转矩(Cogging Torque))
- [转矩脉动(Torque Ripple)](#转矩脉动(Torque Ripple))
-
一、 直流无刷电机
1. 直流无刷电机介绍
直流无刷电机(BLDC Motor)是一种采用电子换向替代机械换向器的直流电机,由定子、转子、位置传感器(如霍尔传感器)和控制器组成。
核心组件
- 定子:通常由硅钢片叠压而成,绕组分布在定子槽中,通入三相交流电产生旋转磁场
- 转子:由永磁体(如钕铁硼)构成,在定子磁场作用下产生转矩并旋转
- 位置传感器:检测转子位置,为控制器提供换向信号(常用霍尔传感器或编码器)
- 控制器:接收位置信号并控制定子绕组电流换向,实现电机持续旋转
工作原理
通过位置传感器实时检测转子磁极位置,控制器根据检测结果依次给定子三相绕组通电,使定子磁场与转子永磁磁场始终保持90°左右的空间夹角,从而产生持续的电磁转矩驱动电机旋转。相比传统有刷电机,省去了机械换向器和电刷,避免了摩擦损耗和火花问题。
主要优势
- 高效率(通常可达85%-95%)
- 长寿命(无电刷磨损)
- 低噪声(无机械换向冲击)
- 高转速范围
- 良好的调速性能
典型应用
- 新能源汽车驱动系统
- 工业自动化设备
- 无人机动力系统
- 家用电器(如空调压缩机、洗衣机)
- 医疗设备
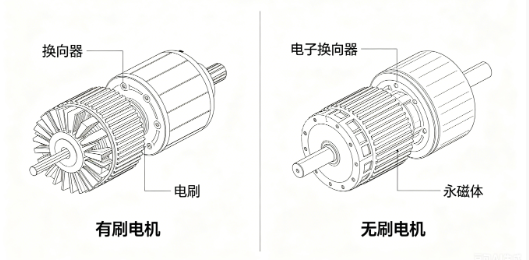
2. 直流无刷电机与传统有刷电机对比
结构差异
| 对比项 | 有刷直流电机 | 无刷直流电机 |
|---|---|---|
| 换向方式 | 机械换向(电刷+换向器) | 电子换向(控制器+位置传感器) |
| 转子结构 | 绕组转子 | 永磁体转子 |
| 定子结构 | 永磁体定子 | 绕组定子 |
| 接触部件 | 有(电刷与换向器接触) | 无(非接触式) |
性能对比
效率与能耗
- 有刷电机:由于电刷与换向器之间存在摩擦损耗和接触电阻,效率通常在70%-85%之间,能量损失较大
- 无刷电机:消除了机械摩擦损耗,效率可达85%-95%,节能效果显著,特别适合长时间运行场景
寿命与维护
- 有刷电机 :
- 电刷属于易损件,需要定期更换
- 换向器会产生碳粉,需要清理维护
- 典型寿命:1000-3000小时
- 无刷电机 :
- 无电刷磨损,主要损耗来自轴承
- 几乎免维护
- 典型寿命:10000-30000小时以上
噪声与电磁干扰
- 有刷电机 :
- 机械换向产生较大噪声(通常60-80dB)
- 电刷火花产生较强电磁干扰(EMI)
- 不适合对噪声敏感的环境
- 无刷电机 :
- 运行平稳,噪声低(通常30-50dB)
- 无火花,电磁干扰小
- 适合医疗设备、办公环境等静音要求高的场合
转速与功率密度
- 有刷电机 :
- 受限于机械换向能力,最高转速通常不超过10000rpm
- 功率密度相对较低
- 高速运行时电刷磨损加剧
- 无刷电机 :
- 转速范围广,可达50000-100000rpm甚至更高
- 功率密度高,同等体积下输出功率更大
- 高速性能优异
控制性能
- 有刷电机 :
- 控制简单,直接调节电压即可调速
- 响应速度较慢
- 低速时转矩脉动明显
- 无刷电机 :
- 需要专用控制器,控制算法复杂
- 动态响应快,调速精度高
- 可实现精确的位置控制和转矩控制
- 支持FOC(磁场定向控制)等高级控制策略
成本分析
- 有刷电机 :
- 初始成本低(结构简单)
- 维护成本高(需定期更换电刷)
- 全生命周期成本较高
- 无刷电机 :
- 初始成本高(需要控制器和传感器)
- 维护成本极低
- 长期运行经济效益更好
综合对比表
| 指标 | 有刷电机 | 无刷电机 | 优势方 |
|---|---|---|---|
| 效率 | 70%-85% | 85%-95% | 无刷 |
| 寿命 | 1000-3000h | 10000-30000h+ | 无刷 |
| 维护需求 | 高 | 低 | 无刷 |
| 噪声水平 | 高 | 低 | 无刷 |
| 电磁干扰 | 强 | 弱 | 无刷 |
| 最高转速 | <10000rpm | >50000rpm | 无刷 |
| 控制复杂度 | 简单 | 复杂 | 有刷 |
| 初始成本 | 低 | 高 | 有刷 |
| 功率密度 | 较低 | 高 | 无刷 |
| 可靠性 | 一般 | 高 | 无刷 |
3. 直流无刷电机的分类
- 从相角上分:60度、120度相位角
- 按速度分:高速无刷电机、低速无刷电机
- 是否有位置传感器分:有位置传感器无刷电机、无位置传感器无刷电机
- 反电动势:梯形波:BLDC,正弦波:PMSM永磁同步电机
- 按结构形式分:内转子电机、外转子电机
内转子电机与外转子电机对比
结构差异
内转子电机(Inrunner)
- 结构特点:转子在内部,定子在外部
- 工作原理:内部的永磁体转子旋转,外部的定子绕组固定
- 常见应用:传统工业电机、电动汽车驱动、机床主轴
外转子电机(Outrunner)
- 结构特点:转子在外部,定子在内部
- 工作原理:外部的永磁体转子旋转,内部的定子绕组固定
- 常见应用:无人机电机、风扇、硬盘驱动器、电动工具
性能对比
| 对比项 | 内转子电机 | 外转子电机 |
|---|---|---|
| 转动惯量 | 较小 | 较大 |
| 动态响应 | 快 | 较慢 |
| 转矩密度 | 较低 | 较高 |
| 散热性能 | 较好(定子在外) | 一般(定子在内) |
| 最高转速 | 高(可达50000rpm+) | 相对较低(通常<20000rpm) |
| 结构稳定性 | 好 | 需考虑离心力影响 |
| 安装方式 | 轴输出,便于连接负载 | 外壳旋转,可直接驱动 |
| 防护等级 | 较易实现高防护 | 转子外露,防护较难 |
二、直流无刷电机的重要参数
1. 电气参数
额定电压(Rated Voltage)
- 定义:电机设计的工作电压,通常为直流电压
- 常见值:12V、24V、36V、48V、72V等
- 影响:决定电机的转速范围和功率输出能力
- 注意:实际工作电压应在额定电压±10%范围内
额定电流(Rated Current)
- 定义:电机在额定负载下连续运行时的电流
- 单位:安培(A)
- 影响:与电机输出功率和发热直接相关
- 选型要点:驱动器电流容量应大于电机额定电流的1.5-2倍
额定功率(Rated Power)
- 定义:电机在额定工况下输出的机械功率
- 计算公式 :P = T × ω = T × (2πn/60)
- P:功率(W)
- T:转矩(N·m)
- n:转速(rpm)
- 分类:输入功率(电功率)和输出功率(机械功率)
- 效率关系:输出功率 = 输入功率 × 效率
相电阻(Phase Resistance)
- 定义:定子每相绕组的直流电阻
- 单位:欧姆(Ω)
- 影响 :
- 决定铜损大小(P_loss = I²R)
- 影响电机发热和效率
- 电阻越小,效率越高
- 典型值:几毫欧到几欧姆不等
相电感(Phase Inductance)
- 定义:定子每相绕组的电感量
- 单位:毫亨(mH)
- 影响 :
- 影响电流响应速度
- 电感越大,电流变化越慢,转矩脉动越小
- 影响PWM开关频率选择
- 典型值:0.1-10mH
反电动势常数(Back EMF Constant, Ke)
- 定义:电机旋转时产生的反电动势与转速的比值
- 单位:V/krpm 或 V/(rad/s)
- 物理意义:反映电机的电磁设计特性
- 计算公式 :Ke = E / ω
- E:反电动势(V)
- ω:角速度(rad/s)
- 应用:用于无传感器控制算法中的位置估算
转矩常数(Torque Constant, Kt)
- 定义:电机产生的转矩与电流的比值
- 单位:N·m/A
- 计算公式:Kt = T / I
- 重要关系:在国际单位制中,Kt = Ke(数值相等)
- 应用:用于转矩控制和电流环设计
2. 机械参数
额定转速(Rated Speed)
- 定义:电机在额定电压和额定负载下的稳定运行转速
- 单位:转/分钟(rpm)
- 影响因素:电压、负载、极对数
- 计算公式:n = (U - I×R) / Ke
最高转速(Maximum Speed)
- 定义:电机允许的安全运行最高转速
- 限制因素 :
- 机械强度(转子离心力)
- 轴承承载能力
- 控制器开关频率
- 反电动势限制
- 典型值:可达50000-100000rpm
额定转矩(Rated Torque)
- 定义:电机在额定工况下可连续输出的转矩
- 单位:牛·米(N·m)或克·厘米(g·cm)
- 计算:T = Kt × I
- 注意:长期运行不应超过额定转矩
峰值转矩(Peak Torque / Stall Torque)
- 定义:电机短时内可输出的最大转矩(堵转转矩)
- 特点 :
- 通常是额定转矩的2-3倍
- 只能短时间运行(避免过热)
- 受限于最大电流和磁饱和
- 应用:加速、过载能力评估
极对数(Pole Pairs)
- 定义:转子永磁体的磁极对数
- 常见值:2极、4极、6极、8极等(极对数=极数/2)
- 影响 :
- 决定电机的基速和转矩特性
- 极对数越多,转矩越大,最高转速越低
- 影响反电动势频率:f = (p × n) / 60
电子转速=实际转速*电机极对数
转动惯量(Moment of Inertia)
- 定义:转子抵抗角加速度的能力
- 单位:kg·m² 或 g·cm²
- 影响 :
- 影响动态响应速度
- 惯量越小,加减速越快
- 影响系统稳定性
- 应用:伺服系统匹配时需考虑负载惯量比
3. 性能参数
效率(Efficiency)
- 定义:输出机械功率与输入电功率的比值
- 计算公式:η = (P_out / P_in) × 100%
- 典型值:85%-95%
- 影响因素 :
- 铜损(绕组电阻损耗)
- 铁损(铁芯磁滞和涡流损耗)
- 机械损耗(轴承摩擦、风阻)
- 高效区:通常在额定负载的60%-80%时效率最高
空载电流(No-load Current)
- 定义:电机在无负载情况下运行的电流
- 组成 :
- 铁损电流
- 机械损耗电流
- 很小的铜损
- 意义:反映电机的内部损耗,空载电流越小越好
空载转速(No-load Speed)
- 定义:电机在无负载情况下的转速
- 特点:略高于额定转速(约5%-10%)
- 计算:n₀ ≈ U / Ke
温升(Temperature Rise)
- 定义:电机运行时温度与环境温度的差值
- 单位:开尔文(K)或摄氏度(℃)
- 绝缘等级 :
- B级:允许温升80K(最高130℃)
- F级:允许温升105K(最高155℃)
- H级:允许温升125K(最高180℃)
- 影响:温升过高会降低效率和寿命
热阻(Thermal Resistance)
- 定义:电机散热能力的指标
- 单位:℃/W 或 K/W
- 意义:热阻越小,散热越好,允许持续输出功率越大
4. 其他重要参数
KV值(速度常数)
-
定义:每伏特电压对应的空载转速
-
单位:rpm/V
-
计算:KV = n₀ / U
-
应用:常用于无人机电机选型
- 高KV值:高转速、低转矩(适合小螺旋桨高速飞行)
- 低KV值:低转速、高转矩(适合大螺旋桨重载飞行)
举例来说,如果KV值是100,工作电压是10V,则实际转速就是 100*10=1000RPM。
电气时间常数(Electrical Time Constant)
- 定义:电流达到稳态值63.2%所需的时间
- 计算:τ_e = L / R
- 意义:反映电流响应速度,影响控制带宽
机械时间常数(Mechanical Time Constant)
- 定义:转速达到稳态值63.2%所需的时间
- 意义:反映机械响应速度
齿槽转矩(Cogging Torque)
- 定义:由定子齿槽与永磁体相互作用产生的周期性转矩波动
- 影响 :
- 造成低速运行不平稳
- 产生噪声和振动
- 抑制方法:斜槽设计、分数槽绕组、优化磁极形状
转矩脉动(Torque Ripple)
- 定义:输出转矩的周期性波动
- 表示:通常用百分比表示(相对于平均转矩)
- 原因 :
- 换向过程中的电流切换
- 反电动势波形非理想
- 齿槽效应
- 要求:精密应用中要求转矩脉动<5%