目录
1.摘要
针对多变三维环境,本文提出一种基于双四元数的无人机三维路径规划方法,利用单位双四元数表示位姿,解决运动耦合不足与万向节死锁问题;通过将双四元数优化模型转化为无约束运动优化模型,消除了两阶段优化的误差累积;并引入双向搜索粒子群算法提升求解效率。
(双四元数作为无奇异、可统一描述旋转+平移的数学工具,使无人机姿态和位置能够被耦合优化。)
2.无人机路径规划
双四元数的运动表示
双四元数由实部和虚部组成:
q ^ = q ~ + ϵ q ~ d \hat{q}=\tilde{q}+\epsilon\tilde{q}_d q^=q~+ϵq~d
其中, q ~ \tilde{q} q~和 q ~ d \tilde{q}_d q~d 为标准四元数, ϵ \epsilon ϵ为对偶单位且满足 ϵ 2 = 0 , ϵ ≠ 0 \epsilon^2=0,\epsilon\neq0 ϵ2=0,ϵ=0。当且仅当满足 ∣ q ~ ∣ = 1 |\tilde{q}|=1 ∣q~∣=1 目
⟨ q ~ , q ~ d ⟩ = 0 \langle\tilde{q},\tilde{q}_d\rangle=0 ⟨q~,q~d⟩=0时, q ^ \hat{q} q^为单位双四元数 (UDQ) 。
任何刚体运动 (旋转矩阵 R R R和平移向量 p ) p) p)均可唯一表示为一个单位双四元数:
q ^ = q ~ + ϵ 2 q ~ p ~ \hat{q}=\tilde{q}+\frac\epsilon2\tilde{q}\tilde{p} q^=q~+2ϵq~p~
为实现空间变换,引入六维运动向量 x = r , p x=r,p x=r,p ( r r r 为旋转向量, p p p 为平移向量),其范数定义为:
∣ x ∣ = ∣ r 1 ∣ 2 + ∣ r 2 ∣ 2 + ∣ r 3 ∣ 2 + σ ∣ p 1 ∣ 2 + σ ∣ p 2 ∣ 2 + σ ∣ p 3 ∣ 2 |x|=\sqrt{|r_1|^2+|r_2|^2+|r_3|^2+\sigma|p_1|^2+\sigma|p_2|^2+\sigma|p_3|^2} ∣x∣=∣r1∣2+∣r2∣2+∣r3∣2+σ∣p1∣2+σ∣p2∣2+σ∣p3∣2
通过定义运动算子 M ( q ^ ) M(\hat{q}) M(q^)和单位双四元数算子 U ^ ( x ) : \hat{U}(x): U^(x):
M ( q ^ ) = R ( q \~ ) , T ( q \^ ) M(\hat{q})=R(\\tilde{q}),T(\\hat{q}) M(q^)=R(q\~),T(q\^)
U ^ ( x ) = U ( r ) + ϵ 2 U ( r ) p ~ \hat{U}(x)=U(r)+\frac\epsilon2U(r)\tilde{p} U^(x)=U(r)+2ϵU(r)p~
路径参数化与问题转换
无人机在时间 t t t 的六自由度状态由单位双四元数统一表示:
q ^ ( t ) = q ~ ( t ) + ϵ 2 q ~ ( t ) p ~ ( t ) \hat{q}(t) = \tilde{q}(t) + \frac{\epsilon}{2} \tilde{q}(t) \tilde{p}(t) q^(t)=q~(t)+2ϵq~(t)p~(t)
将连续路径离散化为 N N N 个路径点,对应的离散运动向量和双四元数路径分别表示为:
x = x ( 1 ) , x ( 2 ) , ... , x ( N ) ∈ M N x = x(1), x(2), \\ldots, x(N) \in M^N x=x(1),x(2),...,x(N)∈MN
q ^ = q \^ ( 1 ) , q \^ ( 2 ) , ... , q \^ ( N ) ∈ U ^ N \hat{q} = \\hat{q}(1), \\hat{q}(2), \\ldots, \\hat{q}(N) \in \hat{U}^N q^=q\^(1),q\^(2),...,q\^(N)∈U^N
相邻路径点需满足步长连续性约束
∥ p ( i + 1 ) − p ( i ) ∥ 2 ≤ δ m a x \|p(i+1) - p(i)\|2 \le \delta{max} ∥p(i+1)−p(i)∥2≤δmax
利用运动算子 M M M 和单位双四元数算子 U ^ \hat{U} U^ 的互逆映射特性,无约束运动优化模型(PPMOM):
min x ∈ M N J ( U ^ N ( x ) ) , s . t . x ( 1 ) = M ( q ^ s t a r t ) , x ( N ) = M ( q ^ g o a l ) \min_{x \in M^N} J(\hat{U}^N(x)), \quad s.t. \, x(1) = M(\hat{q}{start}), \, x(N) = M(\hat{q}{goal}) x∈MNminJ(U^N(x)),s.t.x(1)=M(q^start),x(N)=M(q^goal)
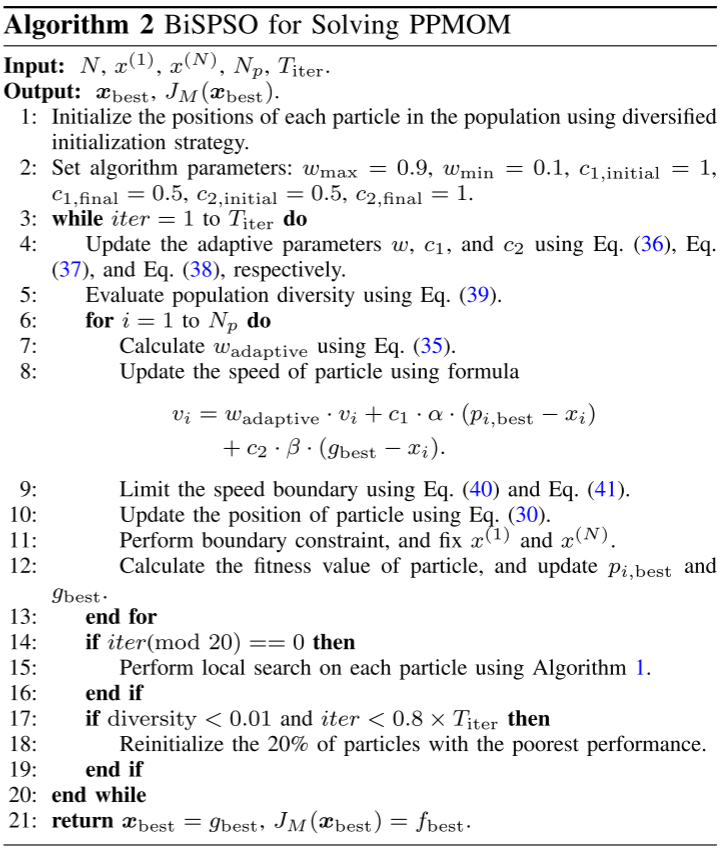
3.无人机路径规划方法
为提高算法收敛速度、解的质量和全局优化性能,本文采用先验知识初始化,局部搜索改进PSO。(常见策略,略~)
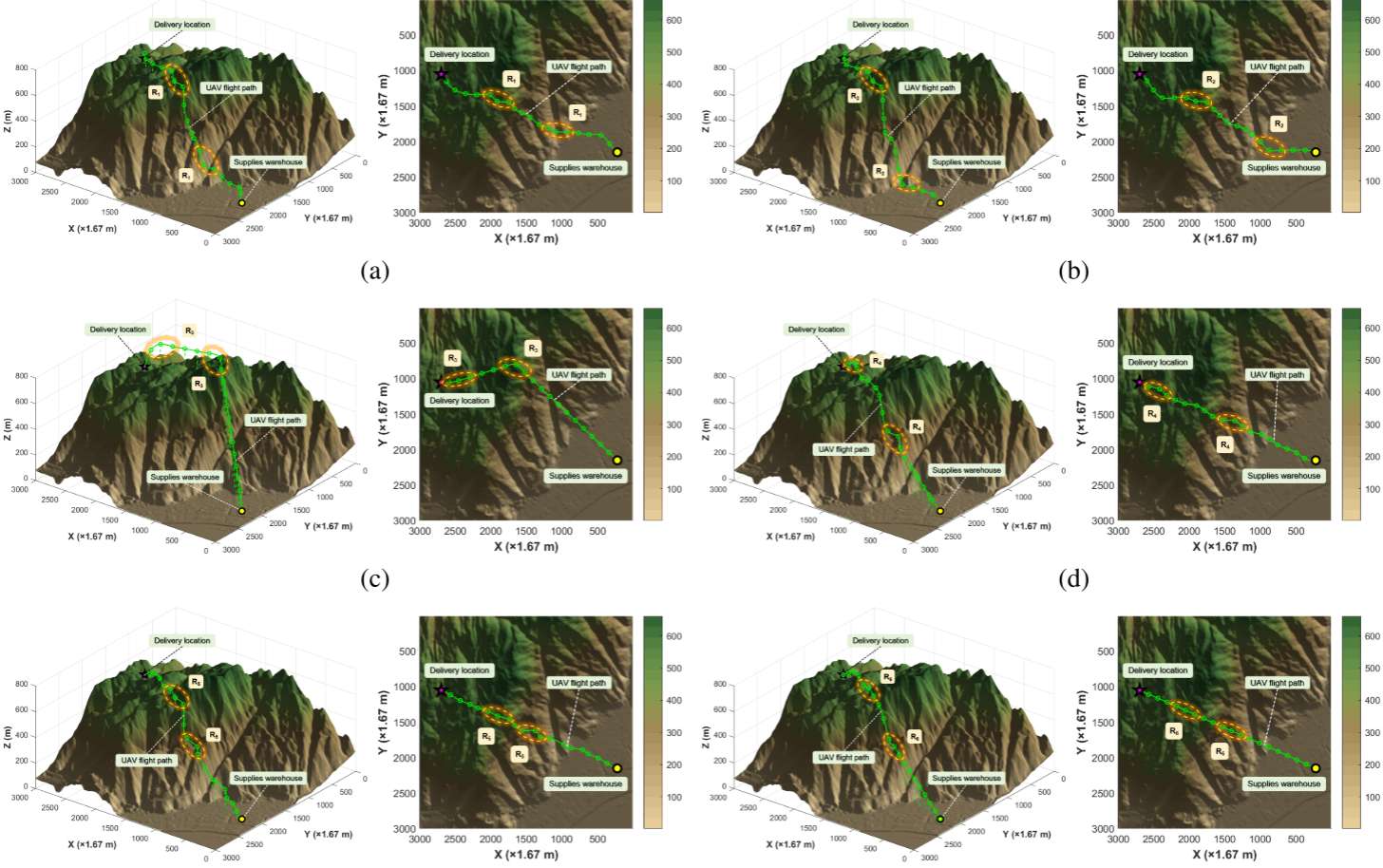
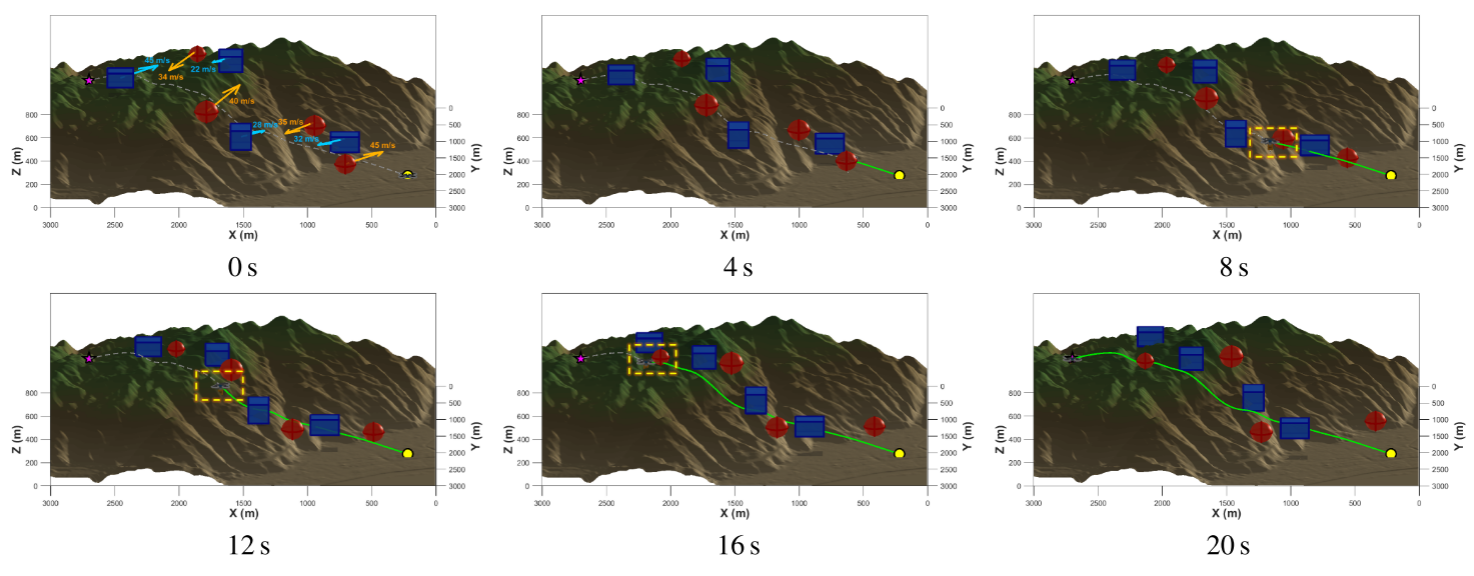
4.结果展示
5.参考文献
Xia H, Ke Y, Jia Z, et al. A Novel UAV 3D Path Planning Method Based on Dual Quaternion Motion Optimization and ApplicationsJ. IEEE Transactions on Vehicular Technology, 2026.
6.算法辅导·应用定制·读者交流
xx