OpenCode 其实在圈内一直很受欢迎,但最近开始变得更出圈,主要是因为小米 MiMo Code 和华为 DevEco Code 都基于开源的 OpenCode 项目进行了二次开发/扩展,用来支撑自己的 AI 编程 Agent。
OpenCode 是一个开源的 AI 编程 Agent 实现,模型无关、生态支持不错,确实适合被企业拿来做自己的 Agent 底座。
不过同样是基于 OpenCode,这两个项目的「二开」方向差异还是挺明显:
- MiMo Code 属于是"通用终端 Agent 增强版" :重点放在长任务、持久记忆、checkpoint、subagent、Goal、workflow/compose 和 MiMo 模型接入
- DevEco Code 是定制 HarmonyOS 专项工具链场景:重点是 DevEco Studio、Hvigor、HDC、ArkTS 检查、鸿蒙知识库、设备运行和 UI 验证
如下图琐事,通过目前的项目结构变化可以看出来,双方的修改和拓展方向差异还是很大的:
- MiMo-Code 裁剪了大量 opencode 的内置能力,核心是在运行时里新增自己定制的 Agent 能力
- DevEco Code 基本保留上游基础设施,然后叠加鸿蒙工具、文档、skills、spec 资源,删减的几个也都是类似 TUI、Stats 等领域的
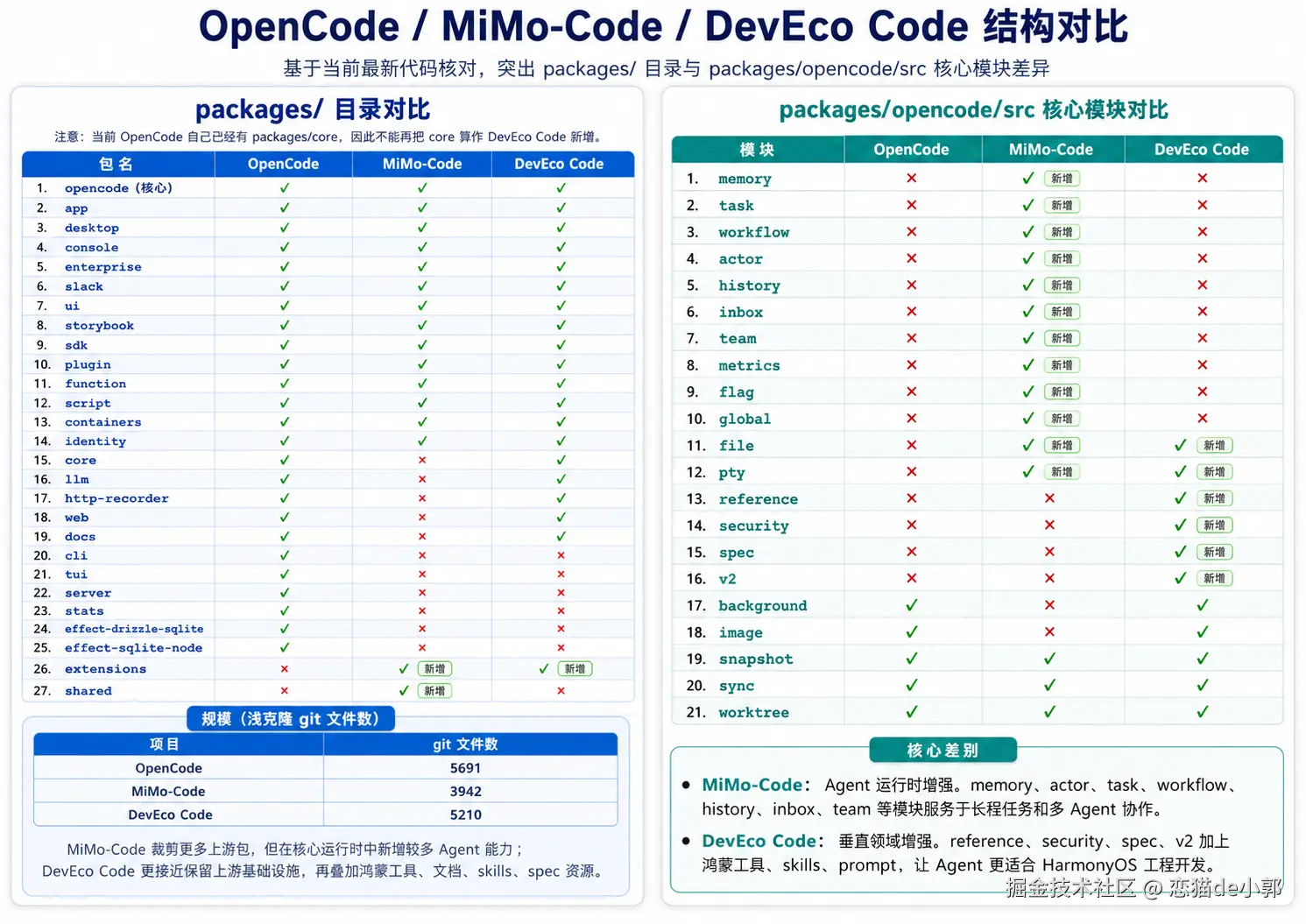
从这个表也能看出核心差别:
- MiMo-Code 的核心是 Agent 运行时增强 ,比如 :
memory、actor、task、workflow、history、inbox、team都服务于长程任务和多 Agent 协作 - DevEco Code 是垂直领域增强定制 :
reference、security、spec、v2加上鸿蒙工具、skills、prompt,让 Agent 更适合 HarmonyOS 工程开发
MiMo Code:通用 Agent 增强
MiMo-Code 的改动主要集中在让 Agent 自主和"持久"上,对,为了"持久",它还是定制了一套 Agent-Memory-Task-Workflow 体系。

MiMo Code 更多是把 OpenCode 改造成自己模型下的通用终端 Agent,最大改动的就是内置持久化记忆系统,支持「项目记忆、会话检查点、任务进度」三重机制,主要是用来解决长会话"越用越偏"的场景。
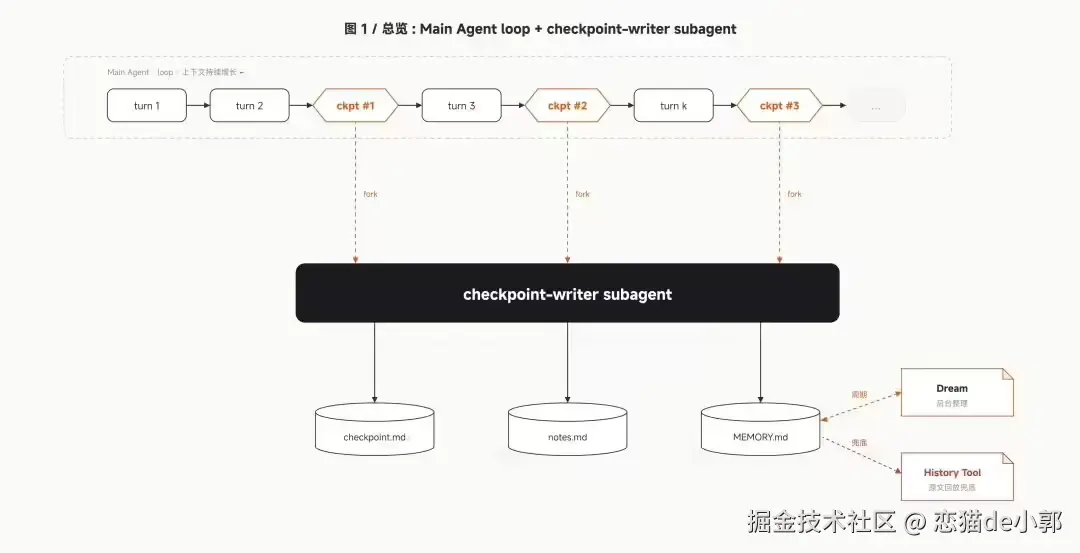
思路就是让主 agent 专心干活,记录完全外包 ,通过独立 subagent 自动保存状态,窗口快满时重建一份干净简报,主 agent 接着干。
同时 MiMo Code 定制的 Harness 配合 Compose 模式,可以实现 MiMo 模型深度协同,按 Tab 切换就能做到「自动完成设计-规划-编码-测试-审查」全流程。
还有一个
/dream命令,每 7 天自动触发,通过独立 Agent 读取历史会话和现有记忆文件,执行合并、去重、验证路径有效性和压缩,将分散的记忆收敛为一份紧凑的当前状态,并更新全局记忆。
在实现上最核心的还是它的记忆系统,主要分成几层:
| 记忆/状态 | 文件或模块 | 用途 |
|---|---|---|
| Project memory | MEMORY.md |
项目级长期知识、规则、架构决策 |
| Session checkpoint | checkpoint.md |
当前会话结构化快照 |
| Scratch notes | notes.md |
临时笔记 |
| Task progress | tasks/<id>/progress.md |
每个任务/子任务的进度记录 |
| FTS search | memory/fts.sql.ts、memory/service.ts |
对记忆内容做检索 |
也就是把「会话状态、项目记忆、任务进度」拆成不同层次,配合 checkpoint writer 自动维护。
另外 MiMo-Code 有树状任务结构,例如 T1、T1.1、T1.2 这种,它们会和 checkpoint/subagent 生命周期联动,在 Agent 停止前会检查未完成任务。
同时 MiMo-Code 把 OpenCode 的 task/subagent 思路扩展成更完整的 actor 系统 ,目前 actor 工具支持:
runspawnstatuswaitcancelsend
可以配合
TaskRegistry、ActorRegistry、ActorWaiter管理生命周期,等于是一套定制的多 Agent 执行模型。
而且 MiMo-Code 还增加了的 /goal 停止条件机制 ,这个 /goal 的核心实现是在 session/goal.ts ,也就是和会话相关,功能类似 Codex 的 /goal :
用户设定一个停止条件后,主 Agent 尝试停止时,会由独立 judge 模型根据完整对话判断条件是否真的满足,如果不满足,就继续推进任务。
最后就是 Compose 编排模式 , 模式支持 plan、execute、review、tdd、verify、merge、parallel、subagent 等内置 skill,也就是类似一套带「需求 -> 计划 -> 实现 -> 测试 -> 审查 -> 合并」的编排流程,也是 Mino Code 定制的特色支持。
所以 OpenCode 还是 OpenCode,但是小米把它改造成更适合自己需求的长程自治、跨会话记忆、多 Agent 协作和 MiMo 模型接入的通用编码 Agent。
DevEco Code:鸿蒙开发专项增强
DevEco Code 是华为 HDC 2026 期间发布的,基于 OpenCode 定制开发,深度集成鸿蒙生态工具链,用来面向 HarmonyOS 应用开发的专用 AI Agent。
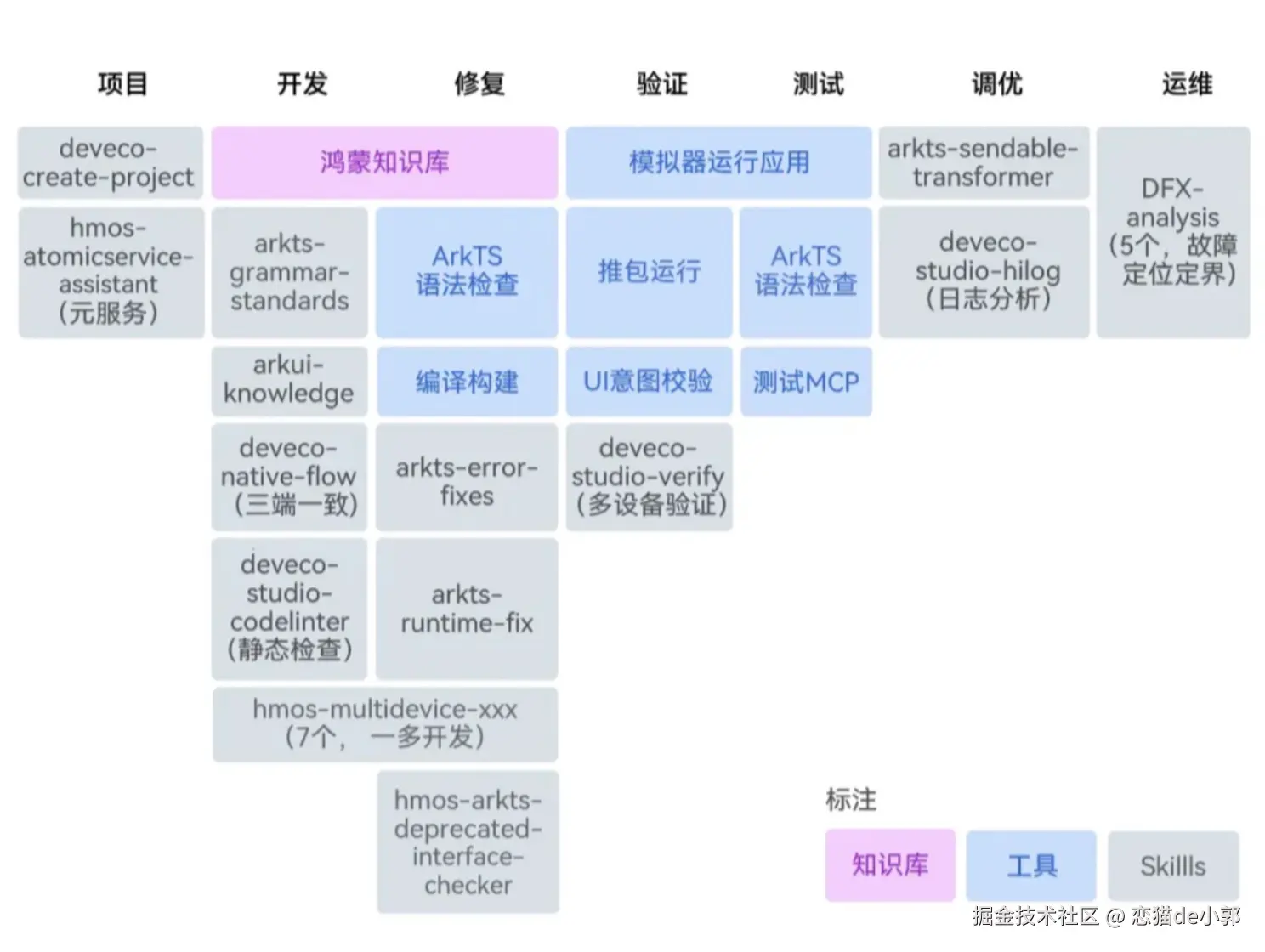
简单来说,DevEco Code 更像是在 OpenCode 里内置了一套 HarmonyOS 开发 Agent 工具链,有点类似之前我们聊过的 Android CLI ,整个定制围绕 HarmonyOS 工程做了一针套支持,包括:创建工程、修复编译、运行到设备、收集日志、查鸿蒙知识库、做 UI 验证。
等于是增加了 DevEco Studio、Hvigor、HDC、ArkTS 检查和设备调试相关集成。
例如:
| 工具 | 说明 |
|---|---|
build_project |
执行编译构建并导出构建产物 |
start_app |
在模拟器或真机上运行应用 |
hdc_log |
收集 / 清理设备日志 / 查看连接设备 |
verify_ui |
执行 UI 操作验证功能是否正确 |
check_ets_files |
ArkTS 静态语法检查 |
arkts_knowledge_search |
HarmonyOS / ArkTS / ArkUI 知识搜索 |
switch_cwd |
切换构建项目路径 |

不过这里需要稍微区分一下实现方式:
hdc_log、switch_cwd、arkts_knowledge_search是 DevEco Code 自己在packages/opencode/src/tool/下实现/注册的本地工具build_project、start_app、check_ets_files、verify_ui等主要在packages/opencode/src/tool/lib/emulator_tools.json中声明 schema,看起来是通过 DevEco/HarmonyOS 侧的桥接能力暴露给 Agent,不是普通 shell 命令硬调- DevEco Code 还在
packages/opencode/src/tool/lib/env.ts里做了DEVECO_HOME、DevEco Studio 版本、hvigorw.js、hdc路径探测
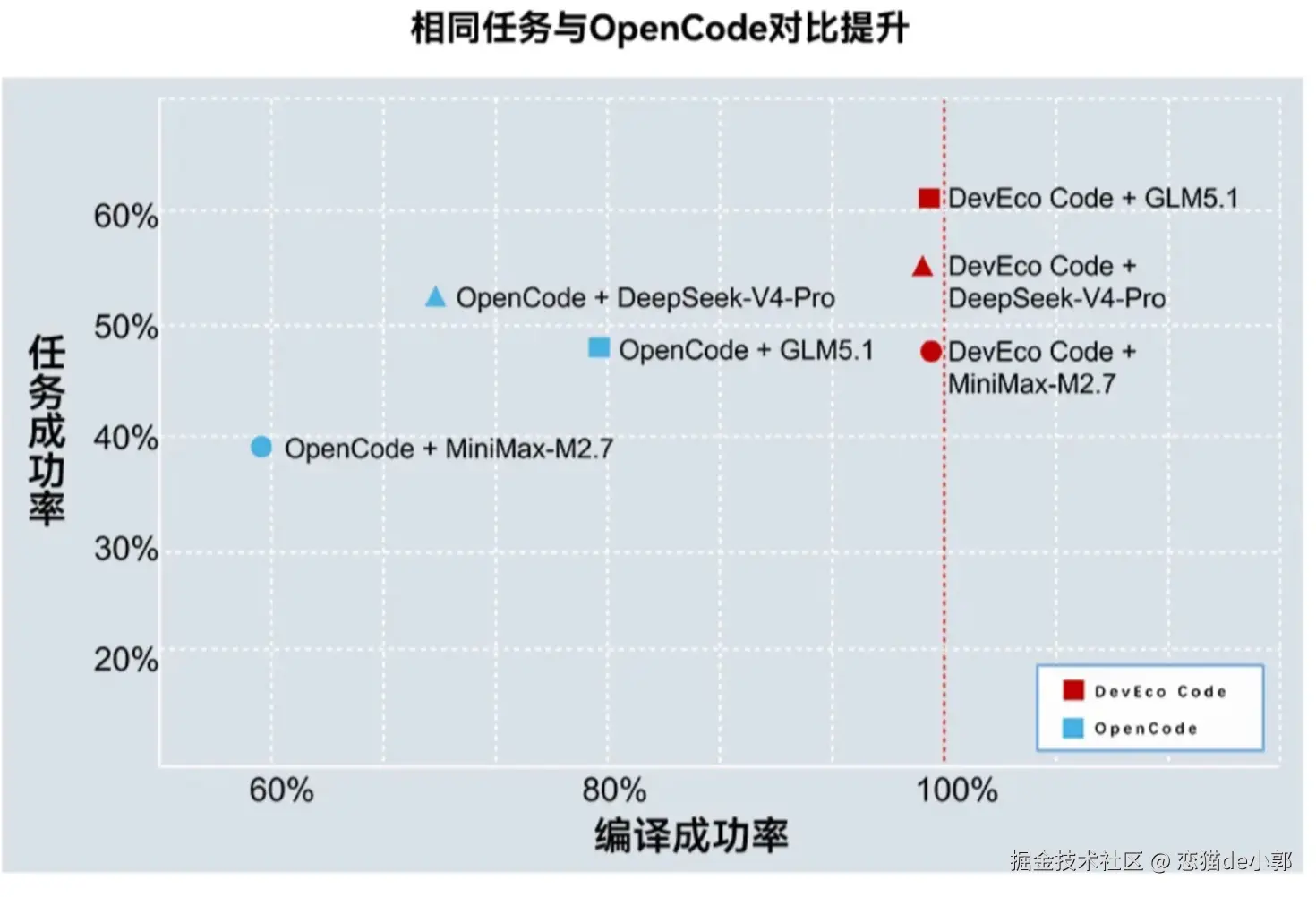
比如遇到鸿蒙相关的编译问题时,Agent 会优先走鸿蒙知识库和专项工具来解决问题,官方的说法是可以大幅提高 AI 任务的成功率:
另外的鸿蒙知识库搜索 arkts_knowledge_search 会调用:
bash
https://cn.devecostudio.huawei.com/codeGenie/bigSearch然后要求 deveco OAuth 登录,它的 tool 描述里明确要求:
遇到
.ets、ArkUI decorator/lifecycle、HarmonyOS SDK API、DevEco/hvigor build error、@kit.*/@ohos.*API 等问题时,必须先查知识库。
当然,DevEco Code 页不是完全只加了工具,也改了一些 Agent 编排,比如:
build:默认模式,允许 UI 验证相关工具goal:更准确地说是 SDD Goal Agent,用于 spec 定义、规范驱动开发和功能验证,这个倒不是 Mino Code 的 goal 那种spec-verify:隐藏 subagent,专门做 Harmony feature 的 build、deploy、UI verifyplan:禁止build_project、check_ets_files、start_app、hdc_log、switch_cwd、arkts_knowledge_search等执行类/依赖工具链操作
所以,回到 DevEco Code,同样 OpenCode 还是 OpenCode,不过华为在它上面加了一套 HarmonyOS 领域工具链和领域知识库,让它在鸿蒙工程里的编译通过率、设备调试效率、ArkTS 问题定位等能力更强。
最后
所以,MiMo-Code 是把 OpenCode 改造成更强大、更有记忆、更适合长程任务的通用自主 Agent,而 DevEco Code 是把 OpenCode 改造成专为 HarmonyOS 开发者服务的垂直工程 Agent。

虽然都是基于 OpenCode,但技术路线几乎不重叠,MiMo 强化的是"Agent 自治能力",DevEco 强化的是"鸿蒙工程落地能力"。
至于为什么它们不直接用 OpenCode 然后合并回上游?你看的定制化程度就知道不大可能回流,这些能力如果合并回上游,会直接破坏 OpenCode 的中立性立场,所以基于 OpenCode 也是一个省时省力的选择。