TF的静态坐标系代码实现可以参考鱼香ROS:
《ROS 2机器人开发从入门到实践》5.2Python中的手眼坐标变换
其中有这么个例子,不太明白坐标转换坐标为什么是这样的,查了相机坐标系后自己有个理解:
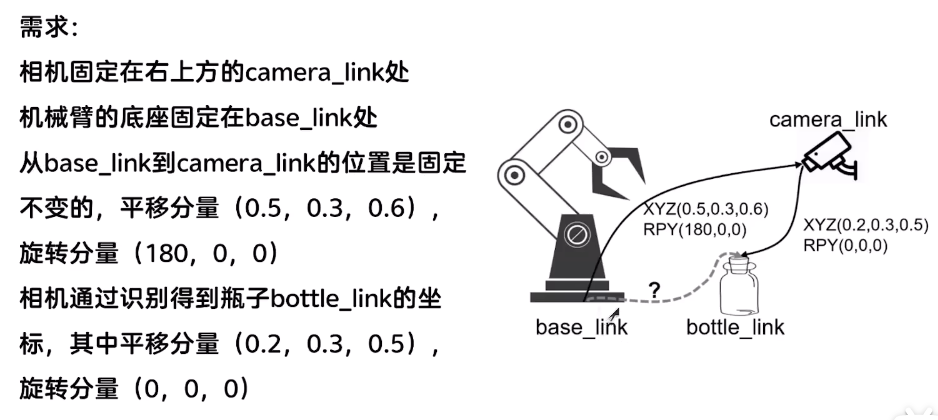
这个旋转分量是不清楚的
查了相机坐标系的定义:
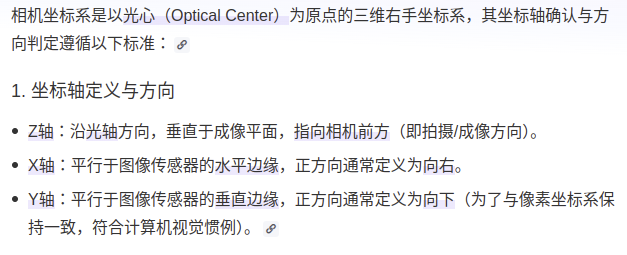
我们这个例子里为什么是(180, 0,0)
我理解是相机正常是镜头朝上放置的,那么
z轴是向上,x轴是向右,y轴根据笛卡尔坐标系是向里边的
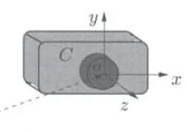
这里绕X轴转了180度,相机就朝下了,其坐标系是这样的(红绿蓝分别代表xyz)
鱼香ROS的图也有点不准确
姑且这么理解吧
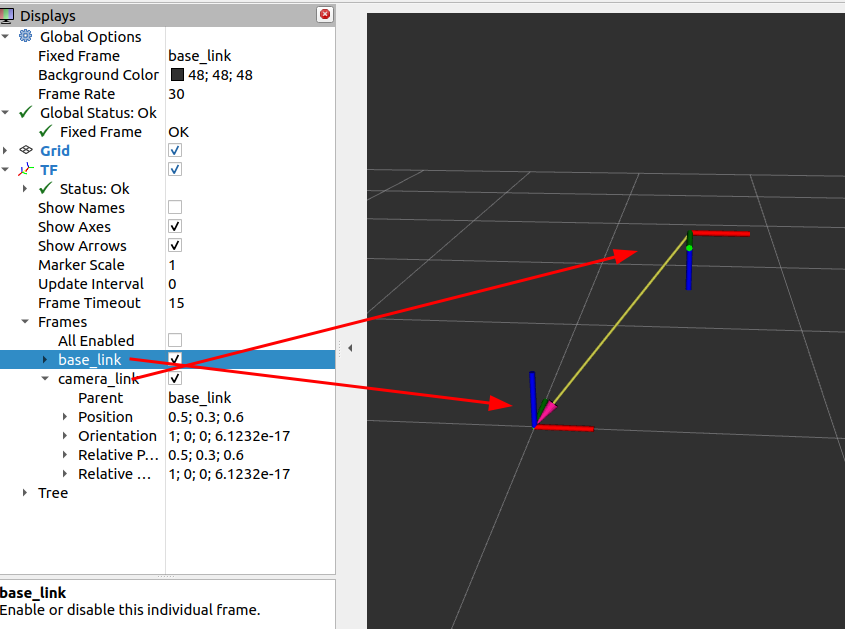
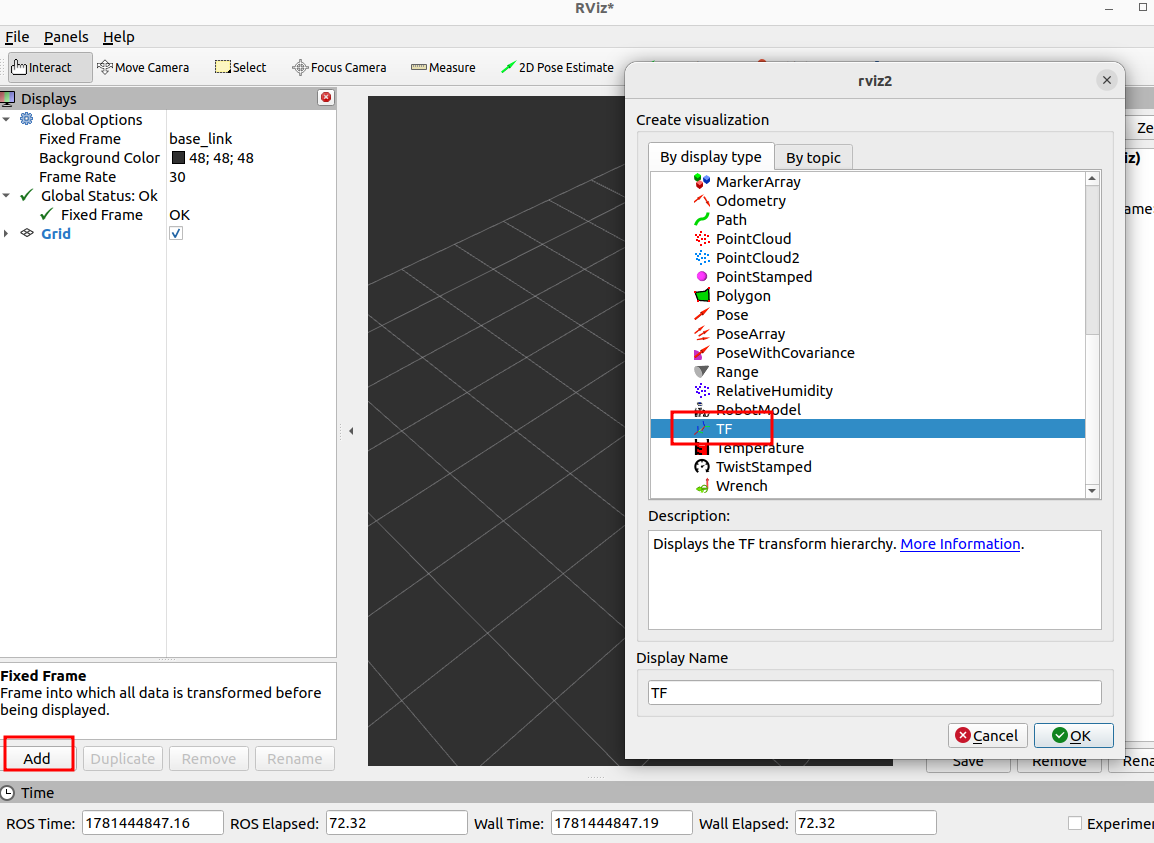
可视化怎么做出来的
首先输入命令
ros2 run rviz2 rviz2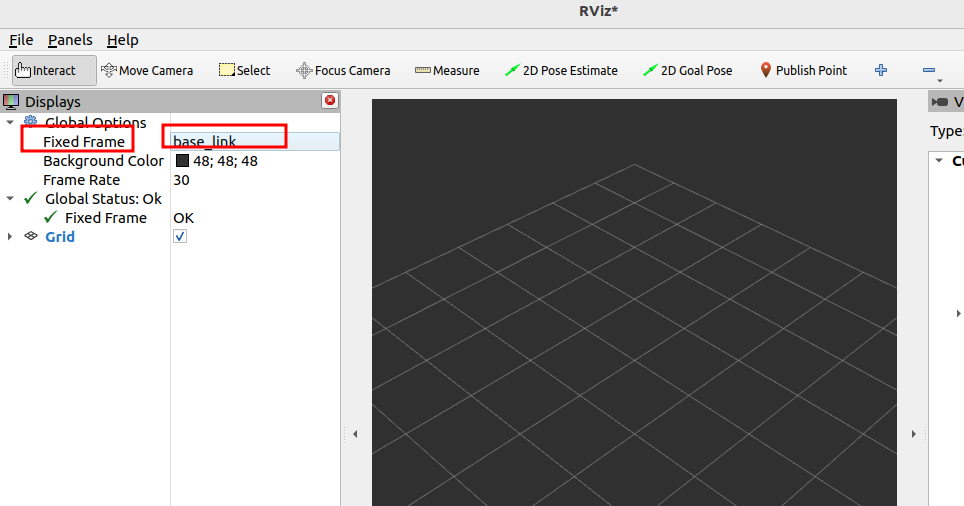
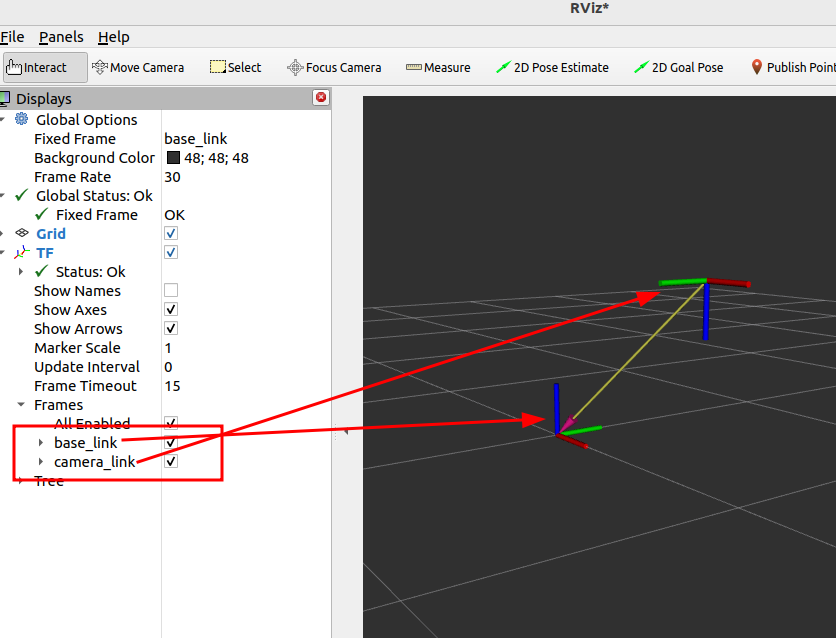
把相应坐标系的√去掉哪个坐标系就会消失