具身机器人三层闭环控制架构
1. 架构总览
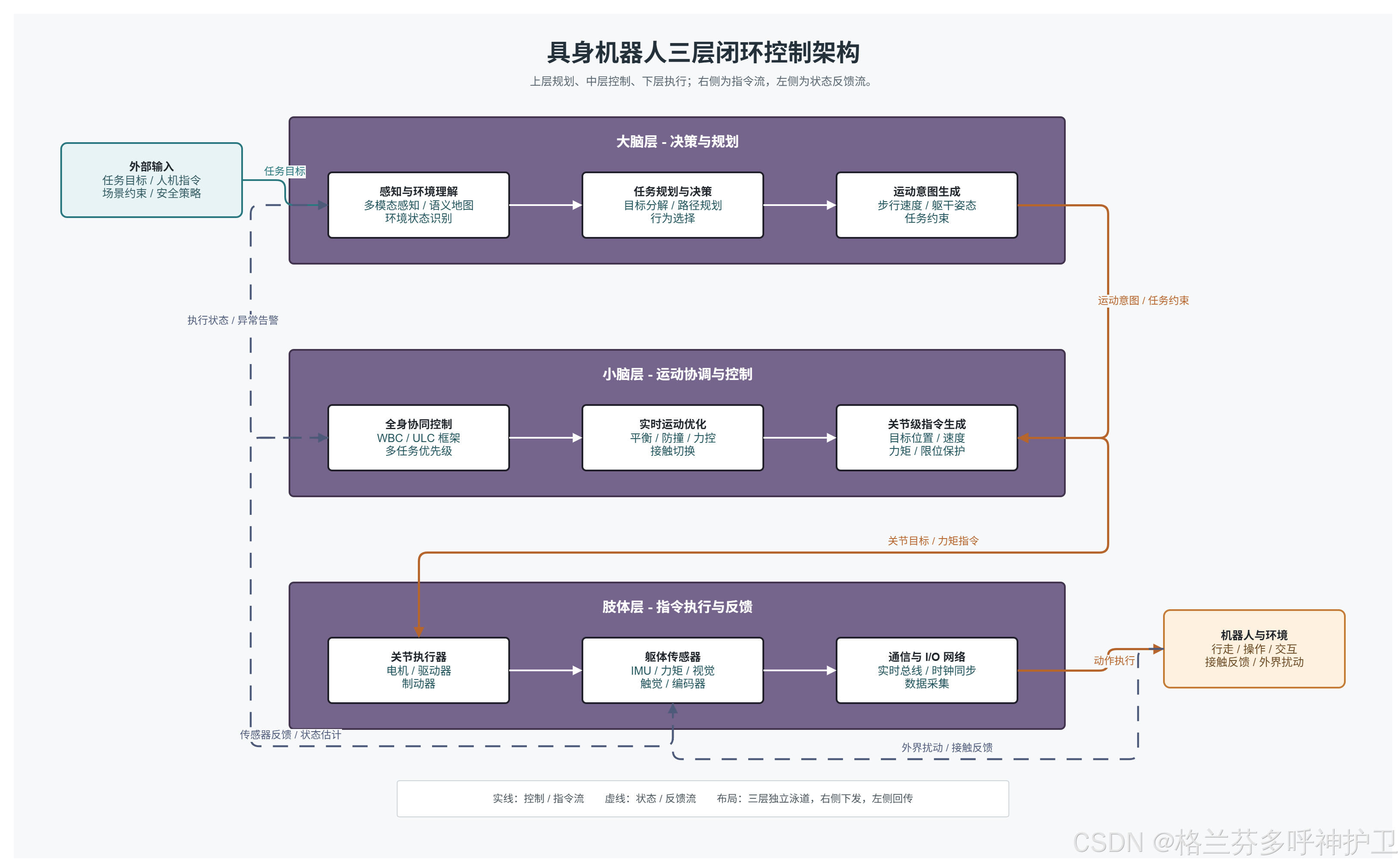
该框图描述的是具身机器人常见的三层闭环控制架构:
- 大脑层:负责理解环境、制定任务和生成运动意图。
- 小脑层:负责把高层意图转化为稳定、实时、可执行的运动控制策略。
- 肢体层:负责执行控制指令,并通过传感器持续反馈机器人和环境状态。
整体逻辑可以概括为:
text
外部任务输入
-> 大脑层进行感知理解与任务规划
-> 小脑层进行运动协调与实时控制
-> 肢体层执行关节动作
-> 机器人与环境发生交互
-> 传感器反馈状态
-> 小脑层和大脑层根据反馈修正控制与规划这是一套典型的感知-决策-控制-执行-反馈闭环系统。
2. 外部输入
外部输入是机器人行为的起点,通常包括:
- 任务目标:例如"走到指定位置""搬运物体""避开障碍物"。
- 人机指令:来自语音、遥控器、上位机、APP 或调度系统的命令。
- 场景约束:例如地形、障碍物、工作区域、协作对象。
- 安全策略:例如速度限制、禁入区域、急停条件、碰撞约束。
外部输入并不直接驱动电机,而是先进入大脑层,由大脑层进行解释、拆解和规划。
3. 大脑层:决策与规划
大脑层对应机器人的高层智能,负责"想清楚要做什么"。
3.1 感知与环境理解
主要功能:
- 融合视觉、IMU、力觉、触觉等多模态感知信息。
- 构建语义地图或局部环境模型。
- 判断机器人所在位置、周围障碍物、可通行区域和交互对象。
输出结果:
- 环境状态
- 语义信息
- 可行动空间
- 风险或异常提示
3.2 任务规划与决策
主要功能:
- 将外部任务目标拆解为可执行的子任务。
- 根据环境状态选择合适的行为策略。
- 规划路径、动作顺序和任务优先级。
示例:
text
任务:机器人从 A 点走到 B 点并搬起箱子
大脑层可能拆解为:
1. 定位目标 B 点
2. 规划行走路线
3. 接近箱子
4. 调整站姿
5. 执行抓取或搬运动作3.3 运动意图生成
大脑层不会直接给每个关节下发电机指令,而是生成较抽象的运动意图,例如:
- 期望行走速度
- 期望转向角速度
- 躯干姿态
- 落脚区域
- 任务约束
- 目标位姿
这些意图会传递给小脑层,由小脑层进一步转化为稳定的控制指令。
4. 小脑层:运动协调与控制
小脑层对应机器人的中层控制系统,负责"把想法变成稳定动作"。
它通常运行频率高于大脑层,强调实时性、稳定性和物理约束。
4.1 全身协同控制
全身协同控制关注机器人整体运动,而不是单独控制某一个关节。
常见内容包括:
- Whole-Body Control,简称 WBC
- 多任务优先级控制
- 躯干、四肢、关节之间的协调
- 重心、支撑区域和接触力控制
它解决的问题是:
text
如何让机器人在执行任务时保持整体平衡,并让多个关节协同完成动作?4.2 实时运动优化
实时运动优化会根据当前状态不断修正运动策略,典型目标包括:
- 保持平衡
- 避免碰撞
- 控制接触力
- 适应地面变化
- 处理打滑、冲击、外部扰动
- 在关节限位和力矩限制内完成动作
例如,机器人走路时如果脚底接触到不平整地面,小脑层需要快速调整关节力矩和姿态,避免摔倒。
4.3 关节级指令生成
小脑层最终会生成肢体层可以执行的低层控制指令,例如:
- 目标位置
- 目标速度
- 目标力矩
- 关节限位保护
- 急停或降级控制指令
这些指令会被发送到肢体层的执行器和通信网络中。
5. 肢体层:指令执行与反馈
肢体层对应机器人硬件执行系统,负责"真正动起来并把状态报回来"。
5.1 关节执行器
关节执行器是机器人运动的直接动力来源,通常包括:
- 电机
- 驱动器
- 减速器
- 制动器
它接收小脑层生成的关节目标或力矩指令,并转换为实际运动。
5.2 躯体传感器
传感器负责采集机器人自身和环境交互信息,常见包括:
- IMU:测量姿态、角速度、加速度。
- 力矩传感器:估计关节受力和接触力。
- 视觉传感器:识别环境、目标和障碍物。
- 触觉传感器:检测接触、压力和滑动。
- 编码器:测量关节角度和速度。
这些信息会反馈给小脑层和大脑层。
5.3 通信与 I/O 网络
通信与 I/O 网络负责连接控制器、驱动器和传感器,要求:
- 高实时性
- 低延迟
- 时钟同步
- 高可靠性
- 支持高速数据采集
常见实现包括实时以太网、CAN、EtherCAT 等。
6. 机器人与环境
机器人最终要在真实环境中完成动作,例如:
- 行走
- 操作物体
- 与人或设备交互
- 承受外界扰动
- 接触地面、墙面、工具或物体
环境并不是静态背景,而是闭环系统的一部分。机器人动作会改变环境状态,环境又会通过接触、视觉、力觉等方式反过来影响机器人。
7. 信息流说明
7.1 控制 / 指令流
图中实线表示控制或指令流:
text
外部输入
-> 大脑层
-> 小脑层
-> 肢体层
-> 机器人与环境含义:
- 大脑层决定"做什么"。
- 小脑层决定"怎么稳定地做"。
- 肢体层负责"实际执行"。
7.2 状态 / 反馈流
图中虚线表示状态或反馈流:
text
机器人与环境
-> 肢体传感器
-> 小脑层状态估计
-> 大脑层任务修正含义:
- 肢体层反馈真实执行状态。
- 小脑层根据反馈快速修正控制。
- 大脑层根据异常、进度和环境变化调整任务规划。
8. 三层之间的关系
| 层级 | 核心问题 | 输入 | 输出 | 特点 |
|---|---|---|---|---|
| 大脑层 | 要做什么 | 任务目标、环境状态、执行反馈 | 任务计划、运动意图 | 抽象、低频、偏智能决策 |
| 小脑层 | 如何稳定地做 | 运动意图、传感器反馈 | 关节目标、力矩指令 | 实时、高频、偏控制优化 |
| 肢体层 | 如何执行并反馈 | 关节指令 | 实际动作、传感器数据 | 硬件相关、实时执行 |
9. 为什么需要三层架构
如果所有功能都放在同一层,会出现几个问题:
- 高层规划太慢,无法直接处理毫秒级控制。
- 低层控制太具体,不适合处理复杂任务语义。
- 硬件执行存在延迟、噪声和扰动,需要实时反馈修正。
- 机器人与环境交互复杂,需要分层降低系统复杂度。
三层架构的优势是:
- 职责清晰
- 控制链路明确
- 方便调试和替换模块
- 兼顾智能决策与实时控制
- 更容易构建稳定的闭环系统
10. 学习重点
理解这张图时,可以抓住以下几个关键点:
- 大脑层不是直接控制电机,而是生成任务和运动意图。
- 小脑层是高层意图与低层执行之间的桥梁。
- 肢体层既执行指令,也持续提供反馈。
- 机器人控制不是单向流程,而是闭环系统。
- 实线代表指令下发,虚线代表状态回传。
- 环境也是系统的一部分,机器人必须根据环境反馈不断修正动作。
11. 一句话总结
具身机器人三层闭环控制架构的核心思想是:
大脑层负责规划,小脑层负责稳定控制,肢体层负责执行与反馈;三者通过指令流和反馈流构成持续自我修正的闭环系统。