目录
1.摘要
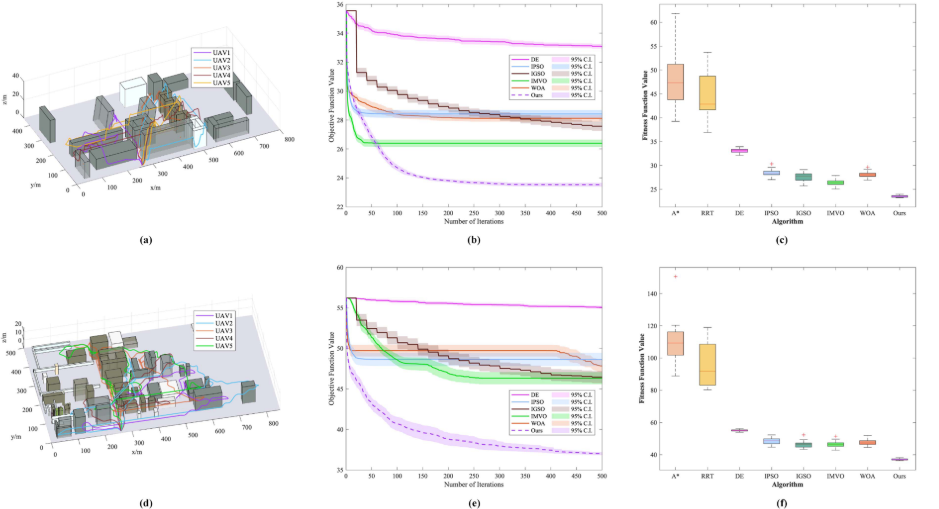
针对灾后工业区复杂危险场景,本文提出一种融合探测点分配与轨迹规划的两阶段无人机集群搜救优化方法,兼顾设备与无人机性能约束,通过启发式算法迭代生成最优探测点位,提升搜救成功率、缩短作业时长。仿真实验表明,该方法相较现有主流算法,搜救平均效率提升 90.80%。
2.搜救作业路径规划模型
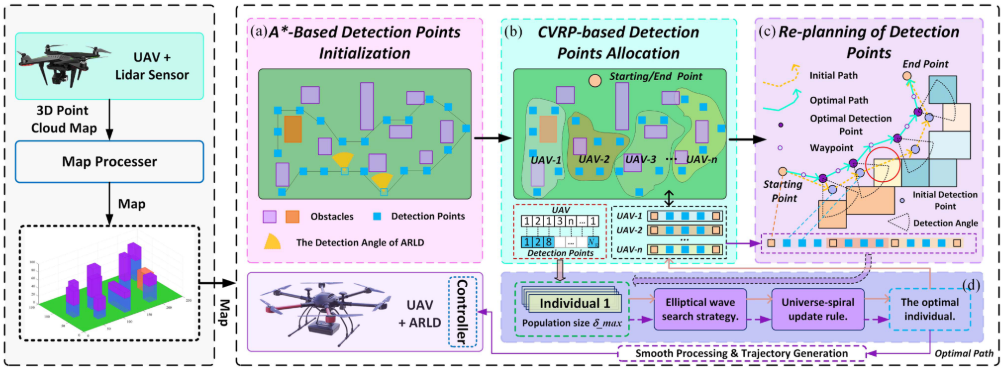
本文基于灾后工业区全局地图开展无人机集群搜救轨迹规划,综合设备与飞行器性能约束,优化搜救效率、能耗与集群负载均衡。通过 A * 算法与 CVRP 模型完成初始探测点求解与分配,并采用改进启发式算法优化探测点位,同时规范定义相关三维模型与无人机位姿参数,构建完整规划体系。
采用A*算法完成探测点初始化,在无障碍可行空域构建连续路径映射曲线,生成有效初始探测节点:
L : 0 , 1 → M , L ( 0 ) = q start , L ( 1 ) = q goal , L ( h ) ∈ M free , ∀ h ∈ 0 , 1 \mathcal{L}:0,1 \to \mathcal{M},\ \mathcal{L}(0)=q_{\text{start}},\ \mathcal{L}(1)=q_{\text{goal}},\ \mathcal{L}(h) \in \mathcal{M}_{\text{free}},\forall h \in 0,1 L:0,1→M, L(0)=qstart, L(1)=qgoal, L(h)∈Mfree,∀h∈0,1
构建含障碍惩罚机制CVRP探测点分配模型,通过引入障碍碰撞惩罚函数规避跨障碍路径:
D ( r 1 , r 2 ) = D ( r 2 , r 1 ) = ∥ P ( r 1 ) − P ( r 2 ) ∥ + f pen × Pen ( r 1 , r 2 , M O S ) , ∀ r 1 , r 2 ∈ 1 , N R \mathcal{D}\left(r_{1}, r_{2}\right)=\mathcal{D}\left(r_{2}, r_{1}\right)=\left\| P^{\left(r_{1}\right)}-P^{\left(r_{2}\right)} \right\| + f_{\text{pen}} \times \text{Pen}\left(r_{1}, r_{2}, \mathcal{M}\mathcal{O}{\mathcal{S}}\right),\ \forall r{1}, r_{2} \in\left1, N_{\\mathcal{R}}\\right D(r1,r2)=D(r2,r1)= P(r1)−P(r2) +fpen×Pen(r1,r2,MOS), ∀r1,r2∈1,NR
min D flock = ∑ n ∑ r 2 D ( r 1 , r 2 ) × ξ ( n , r 2 ) \min \mathcal{D}{\text{flock}}=\sum{n} \sum_{r_{2}} \mathcal{D}\left(r_{1}, r_{2}\right) \times \xi\left(n, r_{2}\right) minDflock=n∑r2∑D(r1,r2)×ξ(n,r2)
本文将搜救能效定义为单位能耗下幸存者探测数量,构建能效最大化与无人机飞行能耗计算模型:
maximize η sar = ∑ r ∑ j λ ( r , j ) ∑ n E n \text{maximize}\ \eta_{\text{sar}}=\frac{\sum_{r} \sum_{j} \lambda(r, j)}{\sum_{n} E_{n}} maximize ηsar=∑nEn∑r∑jλ(r,j)
E n = ∑ i ( η fly / v i ) × d i × ξ ( n , i ) , i ∈ P n ∖ P n ( end ) E_{n}=\sum_{i}\left(\eta_{\text{fly}} / v_{i}\right) \times d_{i} \times \xi(n, i),\ i \in \mathcal{P}{n} \setminus P{n}^{(\text{end})} En=i∑(ηfly/vi)×di×ξ(n,i), i∈Pn∖Pn(end)
3.提出的算法
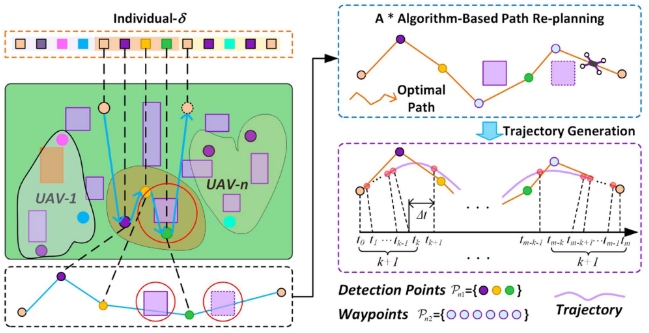
为求解上述多约束优化模型,本文改进鲸鱼优化算法(WOA,常见改进策略,略),搭配A* 局部路径修复与B样条曲线轨迹生成策略,输出无碰撞、高精度的无人机集群最优三维搜救轨迹。
4.结果展示
5.参考文献
Liu H, Tsang Y P, Lee C K M, et al. Optimizing UAV Flocks for Emergency Response in Post-Disaster Industrial ZonesJ. IEEE Transactions on Industrial Informatics, 2025.
6.算法辅导·应用定制·读者交流
xx