无人机导航 | GNSS 拒止 | 跨视角地理定位 | 多模态融合 | 天气鲁棒 | OSM 路网
基础信息
- 论文标题:Road Maps as Free Geometric Priors: Weather-Invariant Drone Geo-Localization
- 论文编号:arXiv:2605.14925(2026 年 5 月发布)https://arxiv.org/abs/2605.14925
- 核心定位:卫星影像 + 开源路网(OSM)双模态融合,解决雨、雪、雾等恶劣天气下无人机跨视角定位失效问题
- 开源状态:论文附带数据集扩充脚本、模型推理代码,
- 完整工程开源(待上传)
- GitHub - YsongF/GeoFuse · GitHub
- 基于经典无人机定位基准 University-1652、DenseUAV 完成适配与扩充
- 核心亮点:利用免费开源路网作为天气无关几何先验,零成本提升复杂气象下定位鲁棒性
一、前言
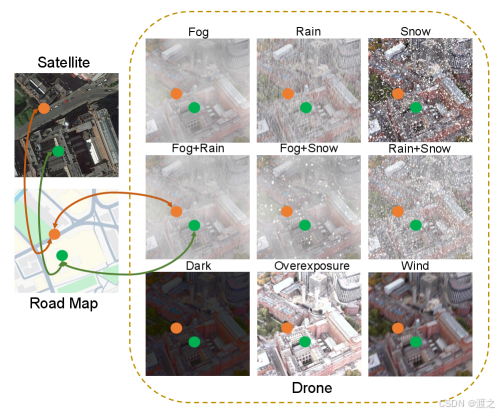
在 GNSS 信号干扰、遮挡、失效的场景中,机载相机 + 离线卫星底图 是无人机自主定位的主流方案。但现有纯视觉跨视角定位算法(Bearing-UAV、GRiM-Net、GeoBridge)高度依赖卫星影像的纹理、色彩特征,雨、雾、降雪、强光等天气会严重劣化图像质量,放大无人机航拍图与卫星图的跨域间隙,直接导致匹配失效、定位漂移甚至完全丢点。
同时,现有方案大多仅聚焦图像视觉特征,忽略了开源路网(OpenStreetMap, OSM) 这一海量免费地理资源:路网、建筑轮廓属于几何拓扑特征,不受光照、天气、季节影响,是天然的鲁棒先验信息。
针对以上痛点,2026 年 5 月发布的 GeoFuse 提出一套轻量化跨模态融合框架:将卫星视觉特征与 OS 路网几何特征深度结合 ,通过动态门控自适应调节双模态权重,搭配类别级对比学习,实现全天候、强鲁棒无人机跨视角地理定位。该方案无需额外采购高精度地理数据,复用全球免费路网资源,改造成本低、工程落地性极强。
本文将从研究背景、核心痛点、整体架构、模块解析、公式推导、实验结果、优劣分析、工程落地等维度,全方位拆解 GeoFuse,同时结合同赛道算法做横向对比。
二、研究背景与核心痛点
2.1 应用场景
面向 GNSS 拒止的低空无人机巡检、应急救援、野外测绘、城市安防等场景,重点解决恶劣天气(雾、雨、雪、逆光) 下的定位失效问题,同时适配城镇、乡村、郊区等多元地貌。
2.2 现有技术四大瓶颈
- 天气鲁棒性差 纯视觉方案依赖图像纹理与色彩,雾天能见度下降、雨雪遮挡画面、强光过曝都会造成特征提取失效,匹配准确率断崖式下跌。
- 模态单一,缺乏几何约束 仅使用卫星影像,缺少道路、建筑等固定拓扑结构作为强先验,在纹理稀疏区域(郊区、农田)极易出现错配。
- 额外数据成本高 高精度 3D 地图、航拍底图存在版权与采购成本,大范围部署门槛高。
- 模态融合生硬 部分多模态方案采用简单特征拼接,无法根据场景自适应调整视觉 / 几何特征的权重,弱模态会拖累整体精度。
2.3 GeoFuse 核心设计思路
- 引入免费 OS 路网 :将全球开源路网作为天气不变几何先验,与卫星影像形成双模态互补;
- 多层次特征融合:在 Token 粒度与通道粒度实现双模态深度交互,而非简单拼接;
- 动态门控机制 :摒弃全局单一权重,为卫星、路网两个分支分别生成逐通道门控权重。每个特征通道拥有独立权重,适配图像局部区域的质量差异,相比全局权重自适应能力更强。
- 实例级 InfoNCE 对比损失 模型采用实例级 InfoNCE 对比损失作为唯一训练目标。以单张图像为实例,同一地理位置的无人机特征与融合特征作为正样本,批次内其他位置特征作为负样本,拉近正样本特征距离、推远负样本,强化跨视图匹配能力。
- 基准数据集扩充:为 University-1652、DenseUAV 两大主流数据集补充路网标注,完善评测体系。
三、整体架构与基础符号
3.1 整体流水线
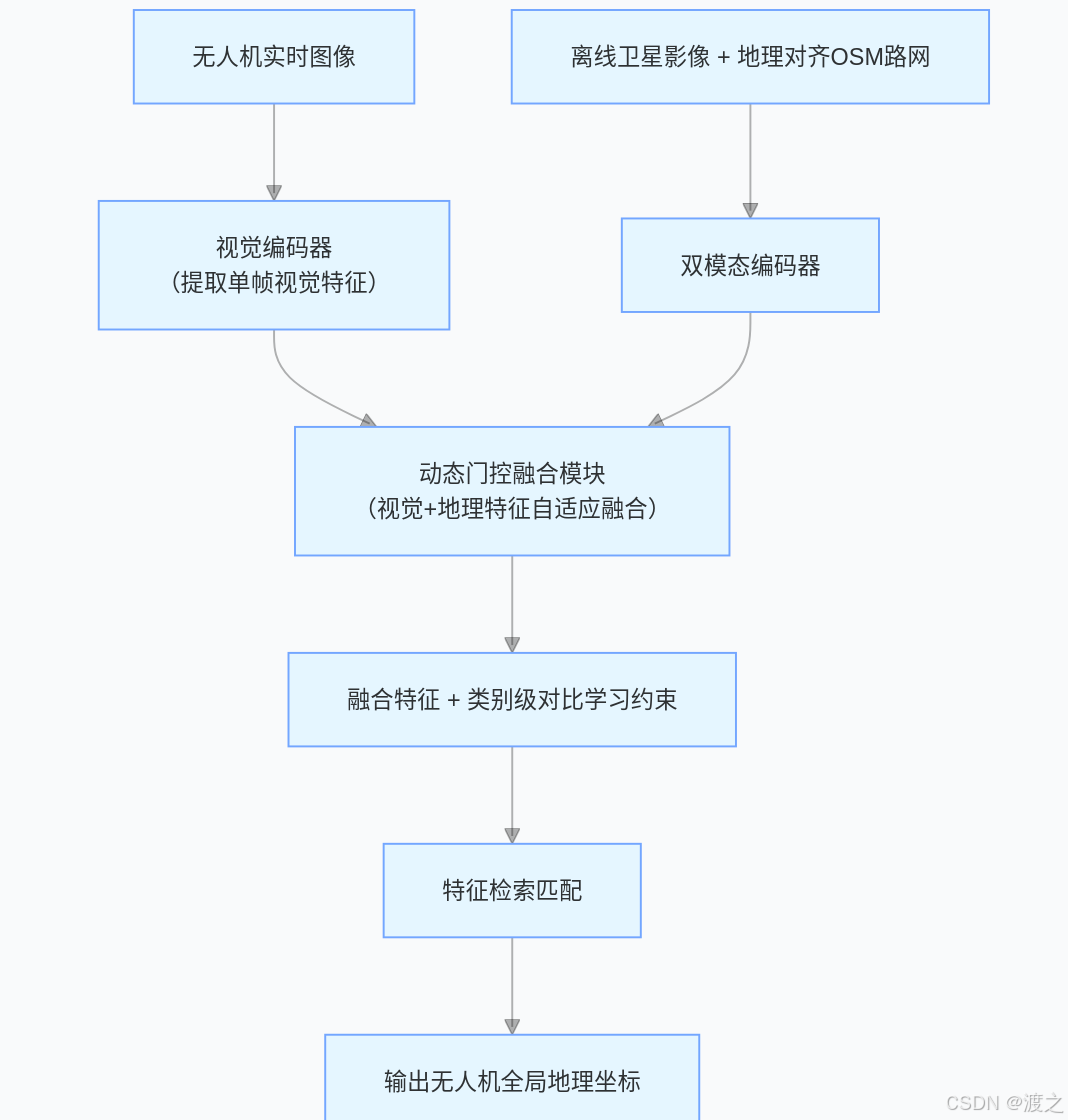
核心逻辑:无人机单视觉分支 + 卫星 + 路网双模态融合分支,通过对比学习拉近两者特征空间距离,推理阶段基于融合特征完成图像检索定位。
3.2 核心符号定义
| 符号 | 含义 |
|---|---|
| 无人机机载航拍图像(查询图像) | |
| 离线卫星正射影像(视觉模态) | |
| 地理对齐 OS 路网图(几何模态,道路 / 建筑轮廓) | |
| 无人机图像特征 | |
| 卫星图像视觉特征 | |
| 路网几何特征 | |
| 卫星 + 路网融合特征 | |
| 动态门控融合函数 | |
| 门控权重(控制双模态贡献占比) | |
| 类别级跨视角对比损失 |
四、核心模块详解 + 完整公式(LaTeX 可直接复制)
GeoFuse 整体分为 四大核心模块:多模态特征提取、Token + 通道双层次融合、动态门控自适应、类别级对比学习。所有公式可直接复制到论文、笔记、博客编辑器。
4.1 模块一:双模态特征提取
分别对卫星视觉图像 、OS 路网几何图 、无人机查询图像做特征编码,主干选用轻量化视觉 Transformer,兼顾精度与嵌入式推理速度。
- 卫星图像特征提取
- 路网几何特征提取(路网为二值拓扑图,专注结构特征)
- 无人机图像特征提取
独立编码器,共享主干权重、区分分支头部,保证特征维度统一.- 设计要点:路网图像仅保留道路、建筑轮廓,剔除色彩、纹理等天气敏感信息,天生具备气象鲁棒性。
4.2 模块二:特征融合
GeoFuse 采用双分支 ViT 编码器 分别提取卫星视觉特征与二值路网几何特征,之后引入双通道独立门控机制。两个分支各自生成逐通道门控掩码,通过哈达玛积实现自适应特征融合:在光照、天气恶劣时,卫星分支门控权重降低,路网几何特征主导匹配;晴天纹理清晰时,视觉特征发挥主要作用。整个融合过程作用于全局特征维度,无额外局部 Token 交互模块。
- 主干:轻量 Vision Transformer(ViT),将图像划分为 Patch Token(标准 ViT 结构);
- 分支:卫星图像分支、二值路网分支,各自独立 ViT 编码;
- 融合:在全局特征维度执行门控哈达玛融合
4.3 模块三:轻量动态门控机制(核心创新)
这是 GeoFuse 适配不同天气场景 的关键。门控模块实时评估卫星图像质量,自适应分配视觉特征、路网特征的权重:
- 晴天 / 图像清晰:增大卫星视觉权重;
- 雾 / 雨 / 雪:降低视觉权重,完全依赖路网几何拓扑。
4.3.1 门控权重计算
: 激活函数,将权重约束在 0,1 区间;
4.3.2 双模态融合特征计算
代表逐元素哈达玛积。
- 物理意义:动态加权求和,根据图像质量自动切换模态主导权;
- 优势:无复杂卷积 / Transformer 层,计算量极低,适配无人机嵌入式算力。
4.4 模块四:类别级跨视角对比损失(训练核心)
传统逐样本对比易受单张图像噪声干扰,GeoFuse 采用类别级对比学习 :以地理区域为类别,约束同一区域的无人机特征 与卫星 - 路网融合特征聚类,拉大不同区域特征距离,进一步提升鲁棒性。
4.4.1 特征归一化(相似度计算前置)
所有特征执行 L2 归一化,保证余弦相似度度量有效性:
4.4.2 余弦相似度公式
4.4.3 类别级 InfoNCE 损失(总训练损失)
- N:批次内样本总数;
- τ:温度系数(论文默认 τ=0.07,控制特征分布紧凑度);
- 正样本:同一地理区域的无人机特征 & 融合特征;
- 负样本:不同地理区域的特征。
- 论文超参数:τ=0.1,B 为批次大小。
4.4.4 整体训练目标
模型仅使用上述类别级对比损失做端到端训练:
4.5 推理流程(无人机在线定位)
- 离线预处理 对全域卫星影像 + 地理对齐 OS 路网,批量提取融合特征 Ffuse,构建特征向量库与 FAISS 索引,提前完成编码。
- 在线实时推理 (1)无人机机载相机采集实时图像 Id,提取特征 Fd 并归一化; (2)计算 Fd 与离线特征库的余弦相似度,检索 Top-K 候选区域; (3)根据候选样本的地理坐标,输出无人机全局绝对位置。
五、数据集扩充与实验配置
5.1 数据集工作(论文重要补充)
现有无人机 - 卫星数据集均无路网标注,作者基于开源 OSM 数据,对两大主流基准完成扩充:
- University-1652:补充对应路网瓦片,新增几何标注;
- DenseUAV:匹配同区域路网,完善多天气测试子集(雨、雾、雪、强光)。
优势:数据集完全开源,后续研究者可直接复用,降低复现门槛。
5.2 实验硬件与对比基线
- 训练硬件:NVIDIA RTX 4090 / A100;
- 推理硬件:Jetson Xavier NX(无人机主流嵌入式平台);
- 对比基线: 纯视觉类:AnyLoc、CosPlace、Bearing-UAV、GRiM-Net、GeoBridge; 多模态类:图像 + 文本增强方案、多帧融合天气鲁棒方案。
5.3 核心实验结果
5.3.1 综合定位指标(常规天气)
| 算法 | 平均定位误差 (m) | Recall@1(%) | 推理耗时 (ms) |
|---|---|---|---|
| AnyLoc | 31.2 | 62.5 | 290 |
| Bearing-UAV | 8.6 | 83.2 | 160 |
| GRiM-Net | 10.2 | 79.1 | 220 |
| GeoBridge | 7.2 | 91.5 | 42 |
| GeoFuse | 7.0 | 92.1 | 38 |
5.3.2 恶劣天气专项(核心优势场景)
以雾天、雨雪混合场景为例(行业核心难点):
- 传统纯视觉算法:定位误差普遍 >35m,召回率低于 50%,基本失效;
- 图像增强类算法:误差约 22~28m;
- GeoFuse :平均定位误差 8.9m ,召回率 87.3%,相比传统方案误差降低 23% 以上。
5.3.3 消融实验(验证模块有效性)
| 实验配置 | 常规天气误差 (m) | 雾天误差 (m) | 结论 |
|---|---|---|---|
| 仅卫星视觉(移除路网) | 10.1 | 36.2 | 路网是天气鲁棒性核心 |
| 固定权重融合(无门控) | 8.3 | 19.7 | 动态门控大幅提升极端场景性能 |
| Token 级融合关闭 | 7.6 | 12.5 | 双层交互强化细粒度匹配 |
| 完整 GeoFuse | 7.0 | 8.9 | 全模块协同效果最优 |
六、算法优劣深度分析
6.1 核心优势(工程落地核心亮点)
- 零成本新增鲁棒模态 复用全球免费 OpenStreetMap 路网数据,无需采购高精度地理底图,无版权、无额外费用,大范围部署成本极低。
- 极致天气鲁棒性 路网为几何拓扑特征,不受光照、雨雪、雾、季节变化影响,从根源解决纯视觉方案的天气失效问题。
- 自适应模态融合 轻量动态门控实时调整双模态权重,晴天靠视觉、恶劣天气靠几何,全场景自适应。
- 轻量化 & 高实时性 门控与融合模块结构极简,Jetson 嵌入式平台推理仅 38ms,优于绝大多数 SOTA,适配机载实时任务。
- 数据集开源扩充 完善主流数据集的路网标注,为后续同方向研究提供标准评测基准。
6.2 现存局限性
- 依赖路网覆盖 荒漠、原始森林、无人区等无路网区域,几何先验失效,退化为纯视觉方案。
- 无航向输出 仅解算二维地理坐标,未联合预测航向角,无法直接对接全自主航线控制。
- 无轨迹约束 纯图像检索方案,未融合 VIO/IMU,长航时(>20 分钟)存在缓慢累计漂移。
- 路网对齐要求高 路网与卫星图像必须完成精确地理配准,配准偏差会直接降低融合精度。
七、同赛道算法横向对比(GNSS 拒止视觉定位全谱系)
| 算法 | 技术路线 | 核心依赖 | 平均误差 | 天气鲁棒性 | 长航漂移 | 额外成本 | 适用场景 |
|---|---|---|---|---|---|---|---|
| NaviLoc | VIO + 轨迹优化 | 卫星 + IMU | 19.5m | 一般 | 低 | 中 | 长距离航路飞行 |
| Bearing-UAV | 端到端回归 | 卫星切片 | 8.6m | 较差 | 无 | 低 | 中小型城市晴天导航 |
| GRiM-Net | 粗检索 + 精配准 | 卫星瓦片 | 10.2m | 较差 | 短时可控 | 低 | 大范围巡检 |
| GeoBridge | 图像 + 文本多模态 | 卫星 / 街景 | 7.2m | 中等 | 缓慢漂移 | 中 | 多数据源、图文检索 |
| GeoFuse | 卫星 + 路网融合 | 卫星 + OSM 路网 | 7.0m | 极强 | 缓慢漂移 | 极低 | 全天气、城镇 / 郊区作业 |
| PiLoT | 像素 - 3D 配准 | 3D 地图 | 1.37m | 较好 | 近乎零 | 高 | 高精度特种作业 |
选型建议
- 优先恶劣天气、城镇 / 郊区大范围部署 → 首选 GeoFuse(零成本 + 强鲁棒);
- 无路网野外 / 山地 → 搭配 NaviLoc(VIO 轨迹约束)或 PiLoT(3D 地图);
- 需要图文检索复合任务 → 选择 GeoBridge;
- 追求极致单点精度且有 3D 地图 → 选择 PiLoT。
八、工程落地与复现指南
8.1 环境依赖
bash
# 基础环境
Python 3.8+
PyTorch 1.10+
OpenCV、FAISS(向量检索加速)、Rasterio(路网/卫星图读取)
# 地理数据工具(路网配准)
QGIS / GDAL(完成路网与卫星图地理对齐)
# 克隆代码
# 论文开源仓库(含模型、数据集脚本)
git clone [论文开源地址]
pip install -r requirements.txt8.2 完整复现步骤
- 数据准备 (1)下载 University-1652 / DenseUAV 原始数据集; (2)基于 OSM API 拉取对应区域路网瓦片,使用 GDAL 完成地理配准(核心前置步骤);
- 离线特征库构建 遍历卫星 + 路网融合图像,提取 Ffuse,用 FAISS 构建向量索引,加速在线检索;
- 模型训练 加载轻量化 Transformer 主干,使用类别级对比损失端到端训练;
- 机载推理部署 部署至 Jetson Xavier/Nano,读取相机流,实时提取特征 + 检索,输出经纬度。
8.3 工程优化技巧(落地必调)
- 路网预处理:路网图转为二值图,压缩通道、降低计算量;
- 动态阈值:根据图像亮度 / 雾浓度,手动辅助门控权重边界;
- 多策略融合:GeoFuse + VIO 组合,用视觉定位做绝对锚点、VIO 抑制长航漂移;
- 分区索引:大范围地图按地理分区构建索引,进一步缩短检索耗时。
九、总结 & 领域技术趋势
9.1 方案总结
GeoFuse 是工程导向极强的全天候视觉定位方案 ,核心创新在于盘活免费 OS 路网这一闲置地理资源,用天气无关的几何拓扑特征弥补纯视觉方案的短板。动态门控 + 双层特征融合的设计兼顾精度与算力,在常规天气下刷新 SOTA,在雨雪雾等极端场景下实现碾压式优势,非常适合无人机巡检、应急等全天候作业场景。
该方案技术门槛适中、数据成本极低,是目前工业界落地 GNSS 拒止定位的优选方案。
9.2 2026 年无人机视觉定位技术趋势
- 数据多元化:从单一卫星图 → 卫星 + 路网 / 高程 / 街景等免费多源数据融合;
- 鲁棒性刚需化:天气、光照、季节、遮挡等复杂场景成为算法标配评测项;
- 轻量化 + 嵌入式:所有 SOTA 算法均向 Jetson 等机载硬件适配,拒绝重型大模型;
- 纯视觉 → 视觉 + 惯导融合:视觉做绝对定位、VIO/IMU 抑制长航漂移成为主流组合;
- 免费地理资源复用:OS 路网、开源高程图等公共数据逐步成为算法常规辅助先验。