目录
[4.1 被控系统离散状态空间模型](#4.1 被控系统离散状态空间模型)
[4.2 跟踪误差](#4.2 跟踪误差)
[4.3 预测模型与滚动优化](#4.3 预测模型与滚动优化)
[4.3 RCNC控制器](#4.3 RCNC控制器)
✨1.课题概述
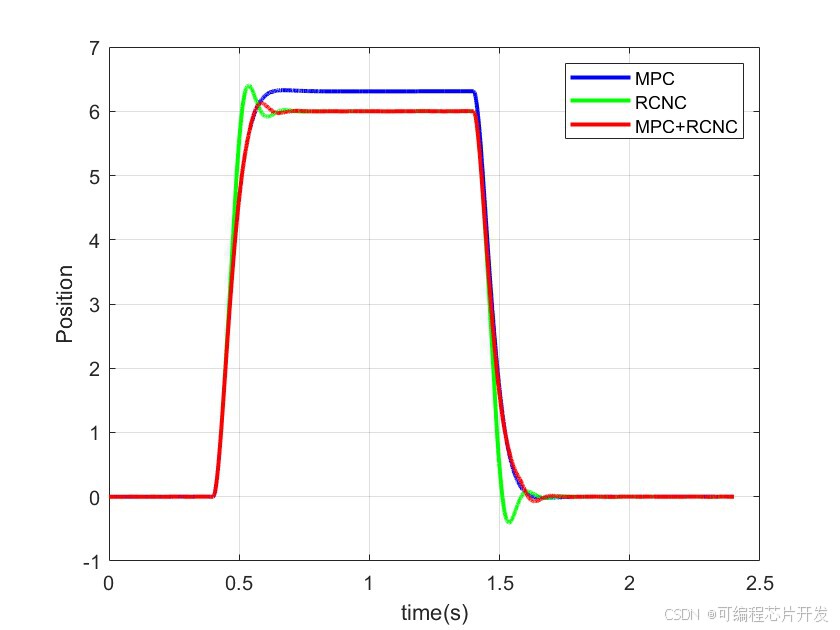
本系统中,MPC依托显式约束在动态大偏差阶段实现快速无超调跟踪,RCNC依靠反正切非线性反馈在稳态阶段强化抗扰能力,二者通过误差阈值实现平稳切换;主控一阶滤波完成第一次跳变抑制,后置PID从频域优化高频波动,延迟闭环让历史平滑数据持续参与迭代优化,两层平滑机制层层递进。MPC基于线性二次型优化保证动态最优性,RCNC基于极点配置思想设计非线性反馈保证稳态鲁棒性,PID则弥补离散切换带来的频域缺陷,整体适配机电伺服、流程工业这类既存在运动约束、又需要长期稳态高精度抗扰的场景,解决了传统单一MPC稳态抗扰弱、单一非线性控制动态收敛慢、模式切换冲击大三类痛点,同时离线预计算的设计保障了数字控制系统的实时运行能力。
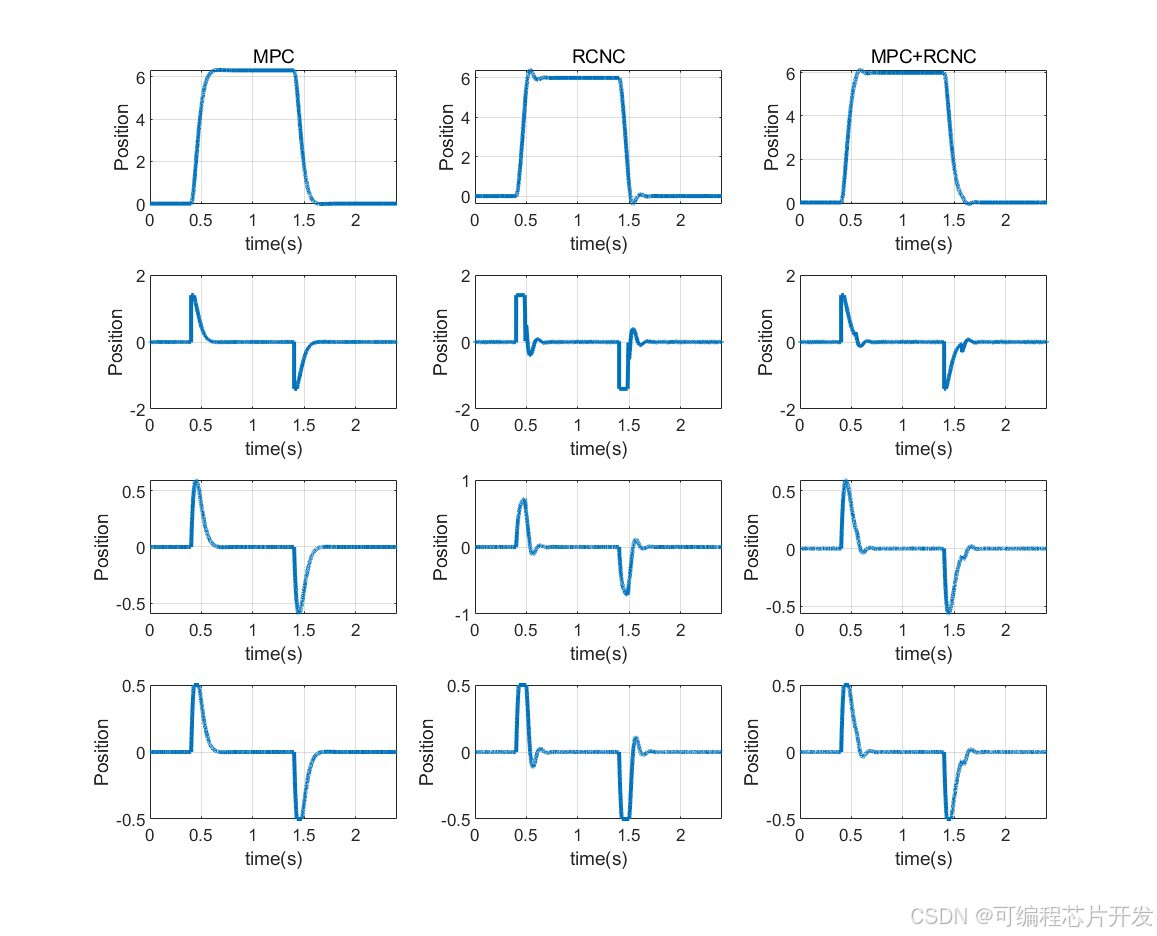
📊2.系统仿真结果
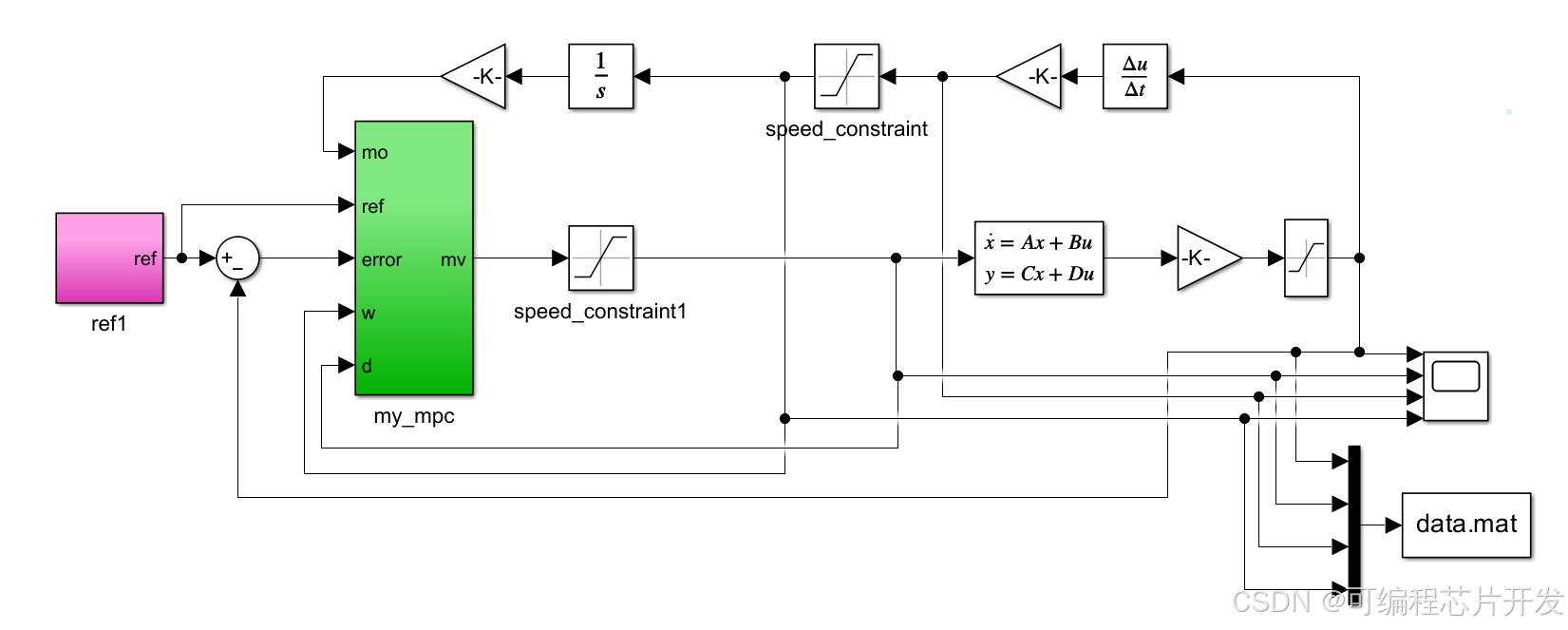
✅3.核心程序或模型
🚀4.系统原理简介
**MPC模式:**基于系统离散状态空间模型,在预测时域内滚动优化控制序列,兼顾轨迹跟踪、控制平滑与输入 / 状态约束,适合大动态、多约束、需前瞻规划的场景(如高速轨迹跟踪、强耦合运动),但计算复杂度高、对模型精度敏感。
**RCNC模式:**鲁棒约束数控控制,基于鲁棒控制理论设计,内置硬约束边界与抗扰补偿,对模型失配、外部扰动(如切削力波动、负载突变)具备强鲁棒性,适合稳态高精度、强扰动、低动态的场景(如精密定位、恒力加工),但动态响应偏保守、缺乏前瞻优化。
4.1 被控系统离散状态空间模型
设被控对象为n阶线性时不变(LTI)系统,离散化后状态空间方程为:

其中:
x(k)∈Rn:k时刻系统状态向量(如位置、速度);
u(k)∈Rm:k时刻控制输入向量(如电机力矩、进给速度);
y(k)∈Rp :k 时刻系统输出向量(实际位置 / 速度);
A,B,C:系统状态矩阵、输入矩阵、输出矩阵;
w(k),v(k):过程噪声与测量噪声,满足有界扰动假设。
4.2 跟踪误差
系统跟踪误差向量为参考输出与实际输出的差值:
e(k)=yref(k)−y(k)
误差变化率为:
Δe(k)=e(k)−e(k−1)
4.3 预测模型与滚动优化
MPC以离散状态空间模型为预测基础,在预测时域Np内预测未来状态,在控制时域Nc内优化控制序列,满足输入/状态约束。
状态预测方程:基于当前状态x(k),预测未来Np步状态:

输出预测方程:对应预测输出:

代价函数:最小化跟踪误差与控制增量,平衡跟踪精度与控制平滑:
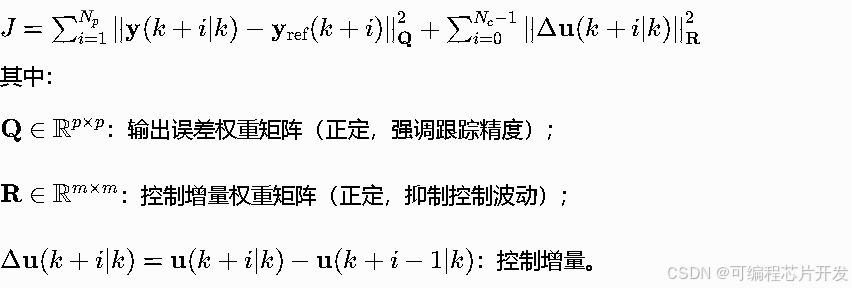
优化求解:将代价函数与约束转化为二次规划(QP)问题,求解得到最优控制序列

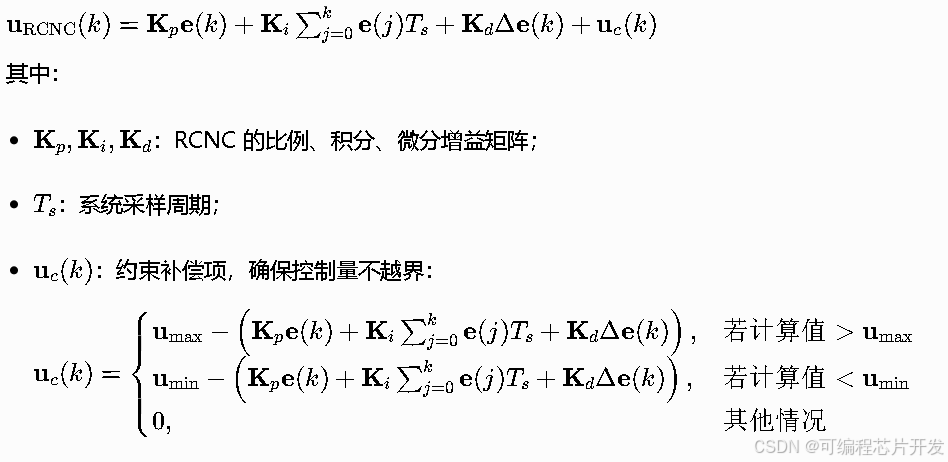
4.3 RCNC控制器
RCNC基于鲁棒控制与约束优化,核心是在模型不确定性与外部扰动下,确保输出严格满足约束,同时实现误差收敛。
采用基于误差的鲁棒反馈控制,结合积分项消除稳态误差,控制律为:
通过李雅普诺夫稳定性分析,RCNC需满足:

💢5.完整工程文件
v v
关注后,GZH回复关键词:a50