哈喽大家好,我是疯狂读论文的戴夫。今天继续啃一篇论文。
我们平时看到的多旋翼无人机,大多是固定形态。
四旋翼就是四个桨,六旋翼就是六个桨,机架、旋翼位置、控制方式基本都提前设计好。
这种设计成熟、可靠,但也有一个问题:
任务变了,机体不一定跟着变。
如果今天要带更重的载荷,可能需要更多旋翼;如果要在狭窄空间里飞,可能需要更紧凑结构;如果要挂载机械臂,可能又希望无人机能够在不大幅倾斜机身的情况下产生不同方向的力。
所以,一个很自然的想法是:
能不能把无人机做成模块化?
像搭积木一样,需要几个模块就拼几个模块,需要什么形状就拼什么形状。
这篇 TRO 2026 论文讨论的就是这个问题:
能不能设计一种模块化多旋翼系统,让无人机不只在平面里拼接,还能拼出三维结构,甚至形成全驱动飞行器?
论文题目是:
The Dodecacopter: A Versatile Multirotor System of Dodecahedron-Shaped Modules
DOI:10.1109/TRO.2025.3636239
可以理解为:
一种由十二面体模块组成的多功能模块化多旋翼系统。
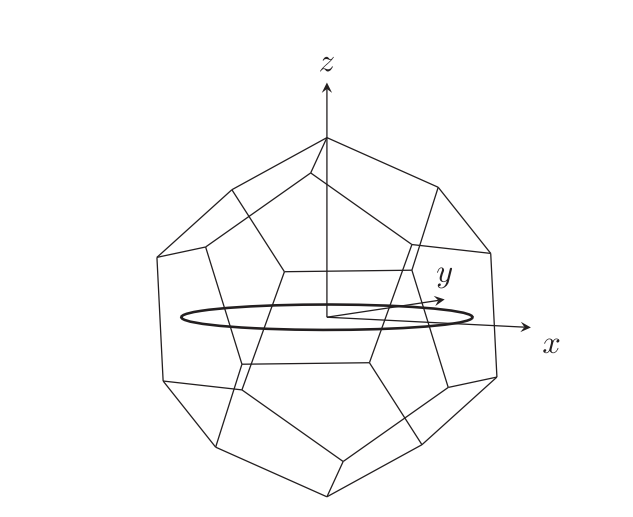
图1 Dodecacopter 单个模块示意图
一、这篇论文讲什么?
这篇论文研究的是 modular rotorcraft,模块化旋翼飞行器。
简单说,就是把无人机拆成多个可以相互连接的独立模块,再根据任务需求拼成不同飞行器。
比如:
少量模块可以拼成类似四旋翼; 更多模块可以拼成六旋翼、十二旋翼; 模块不只铺在一个平面里,还可以向三维空间扩展; 通过改变旋翼朝向,还可以形成全驱动或接近全向飞行的结构。
作者提出的系统叫:
Dodecacopter。
这里的 "Dodeca" 来自 dodecahedron,十二面体。
每个模块都是一个正十二面体框架,中间放一个固定桨距旋翼。多个模块可以通过顶点位置相互连接,拼成不同形态的多旋翼飞行器。
这篇论文的核心,不是设计一架固定无人机,而是设计一种"无人机模块",让飞行器可以根据任务重新组合。
二、现有方法卡在哪里?
现有模块化多旋翼,大多还是平面拼接。
也就是说,模块像平铺积木一样排在一个水平面里,形成一个 flight array,飞行阵列。
这种方式比较直观,也容易控制。
但它的限制也明显。
第一,结构主要在二维平面里展开,整体刚度和紧凑性受限。
第二,旋翼大多朝一个方向,飞行器仍然像普通多旋翼一样,需要靠倾斜机身来产生水平力。
第三,如果模块数量很多,但旋翼仍然基本平行,某些方向的控制能力并不会自然增强,尤其是偏航等方向可能受限。
所以这篇论文的切入点是:
模块化无人机不应该只会"摊平了拼",还应该能在三维空间里拼,并通过不同旋翼朝向获得更丰富的控制能力。
三、作者怎么解决?
作者的解决思路可以概括成三步:
先设计一个合适的模块形状,再定义模块怎么连接,最后用优化方法自动找好结构。
1. 先把模块做成正十二面体
作者没有把模块做成立方体,也没有做成普通平面机臂。
他们选择了 regular dodecahedron,正十二面体。
原因是它有很高的对称性。
通俗说,一个正十二面体可以用很多不同姿态摆放,但它的连接几何仍然容易保持一致。
这对模块化飞行器很重要。
因为模块不仅要能拼起来,还要能以不同方向拼起来。
正十二面体给了模块更多可用姿态,让它不只适合平面拼接,也适合三维拼接。
2. 再设计一种规则连接方式
有了模块形状,还要解决怎么拼。
作者让模块通过十二面体的顶点附近进行连接。
听起来有点抽象,但可以简单理解为:
每个模块有一套规则连接点; 两个模块连接后,相对位置和相对姿态都是可描述的; 连续连接多个模块后,整体结构仍然可以用离散坐标表示。
这点很关键。
因为一旦模块位置可以离散表示,后面就可以用优化方法自动搜索结构。
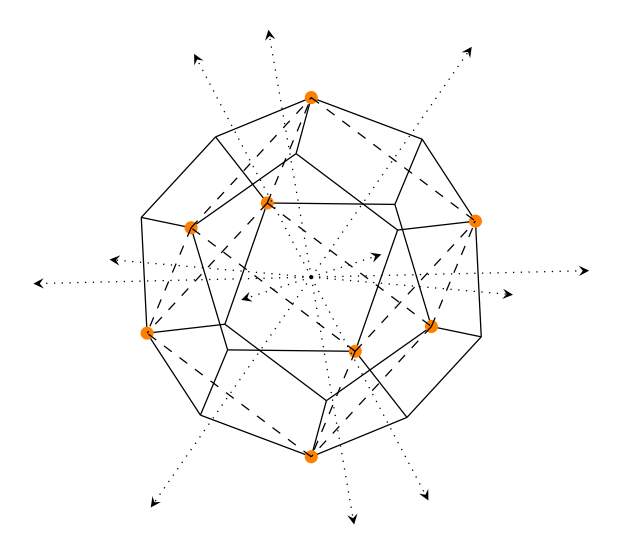
图2 模块的受限连接方式
3. 最后让优化器帮忙找配置
模块一多,可拼的形态就会爆炸式增加。
人工一个个试,肯定不现实。
所以作者把"怎么拼"变成一个优化问题。
比如给定模块数量、结构约束、控制能力要求,系统可以搜索更合适的配置。
这里用到的工具包括 MIP,Mixed-Integer Programming,混合整数规划,以及凸优化方法。
通俗说就是:
不是靠人凭感觉拼无人机,而是把拼装规则写清楚,再让算法找出更合适的形态。
四、关键设计拆解
这篇论文可以用 4 个关键设计来理解。
1. 用十二面体,不是为了好看,而是为了更多姿态
正十二面体的价值在于对称性强。
模块可以有很多等价旋转姿态,这让它在拼接时有更多选择。
如果模块只是普通立方体,连接方式虽然简单,但可用朝向和可形成的旋翼方向就少很多。
十二面体模块的意义,是给"拼法"和"旋翼朝向"同时增加自由度。
2. 不只拼二维阵列,还能拼三维结构
传统模块化多旋翼更像在桌面上拼图。
Dodecacopter 更像是在空间里搭积木。
它可以复现传统四旋翼、六旋翼结构,也可以拼成三角形、四面体等三维结构。
三维结构的好处是更紧凑,也更容易提高结构刚度。
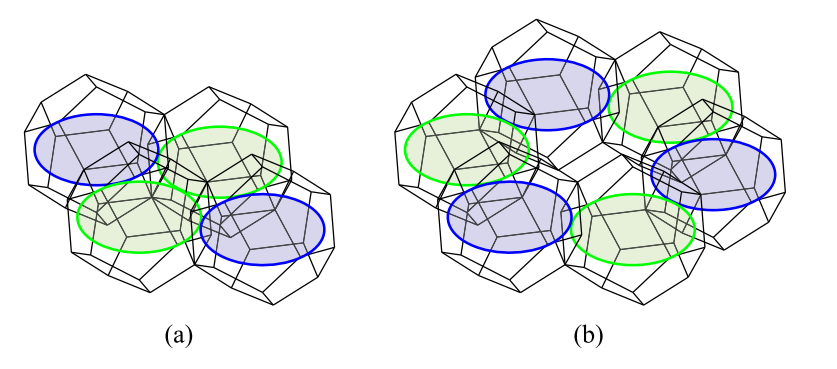
图3 用 Dodecacopter 模块复现传统多旋翼配置
3. 改变旋翼朝向,带来更丰富的控制能力
普通多旋翼的旋翼大多朝上。
它想往前飞,就要先倾斜机身。
但如果有些旋翼本身就是倾斜的,飞行器就可以在不完全依赖机身倾斜的情况下,产生更多方向的力和力矩。
论文中,模块旋翼可以形成 0°、约 41.81°、约 70.53° 等不同倾角。
这让系统有机会构造 6DoF,全驱动飞行器。
通俗说就是:
不是所有桨都只往上吹风,而是让不同方向的桨一起配合,飞行器就能更灵活地产生力和力矩。
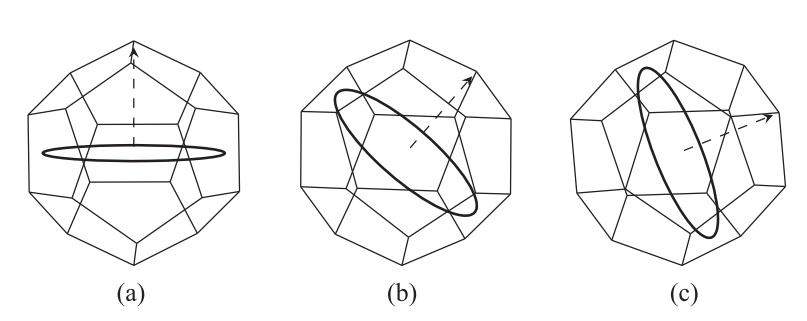
图4 不同模块朝向带来的旋翼倾角
4. 配置不能只看能不能飞,还要看结构和控制
模块化飞行器不是随便拼起来能起飞就行。
还要考虑几个问题:
结构够不够硬; 旋翼控制余量够不够; 某些方向的推力和力矩强不强; 平均功耗会不会太高; 模块之间的旋翼气流会不会互相影响。
所以作者不仅研究了模块连接,还研究了控制分配和结构刚度。
简单说:
好的模块化无人机,不只是拼得出来,还要撑得住、控得动、飞得稳。
五、实验怎么验证?
作者做了一个真实 Dodecacopter 模块原型。
每个模块包括:
正十二面体框架; 碳纤维管和 3D 打印连接件; 无刷电机; 三叶螺旋桨; 电子调速器; 飞控、通信模块和电池安装位。
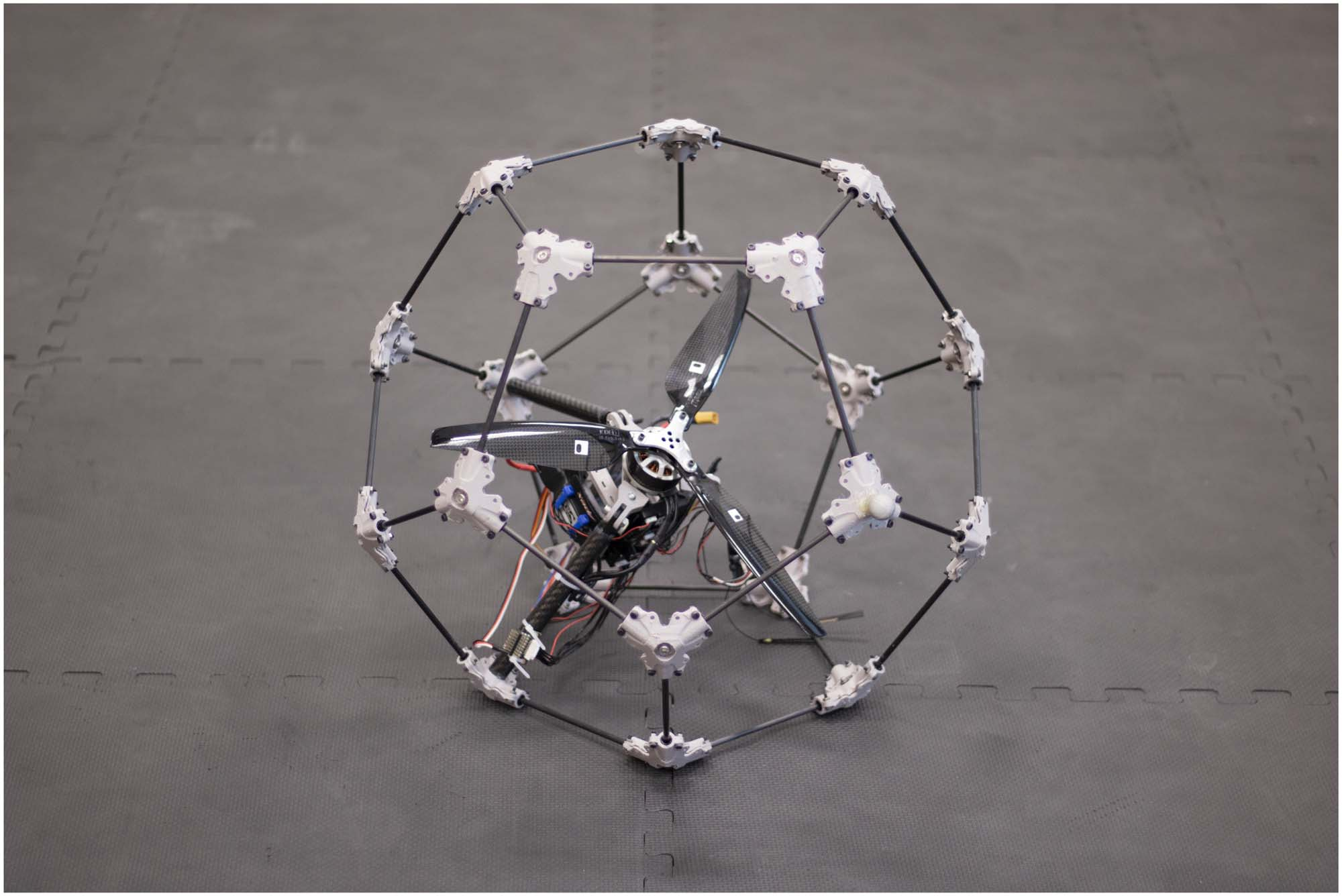
图5 Dodecacopter 模块原型
作者还测试了多种真实拼装构型。
包括普通四旋翼、六旋翼、四面体四旋翼,以及更多模块的三维构型。
最多测试到 16 个模块的配置。
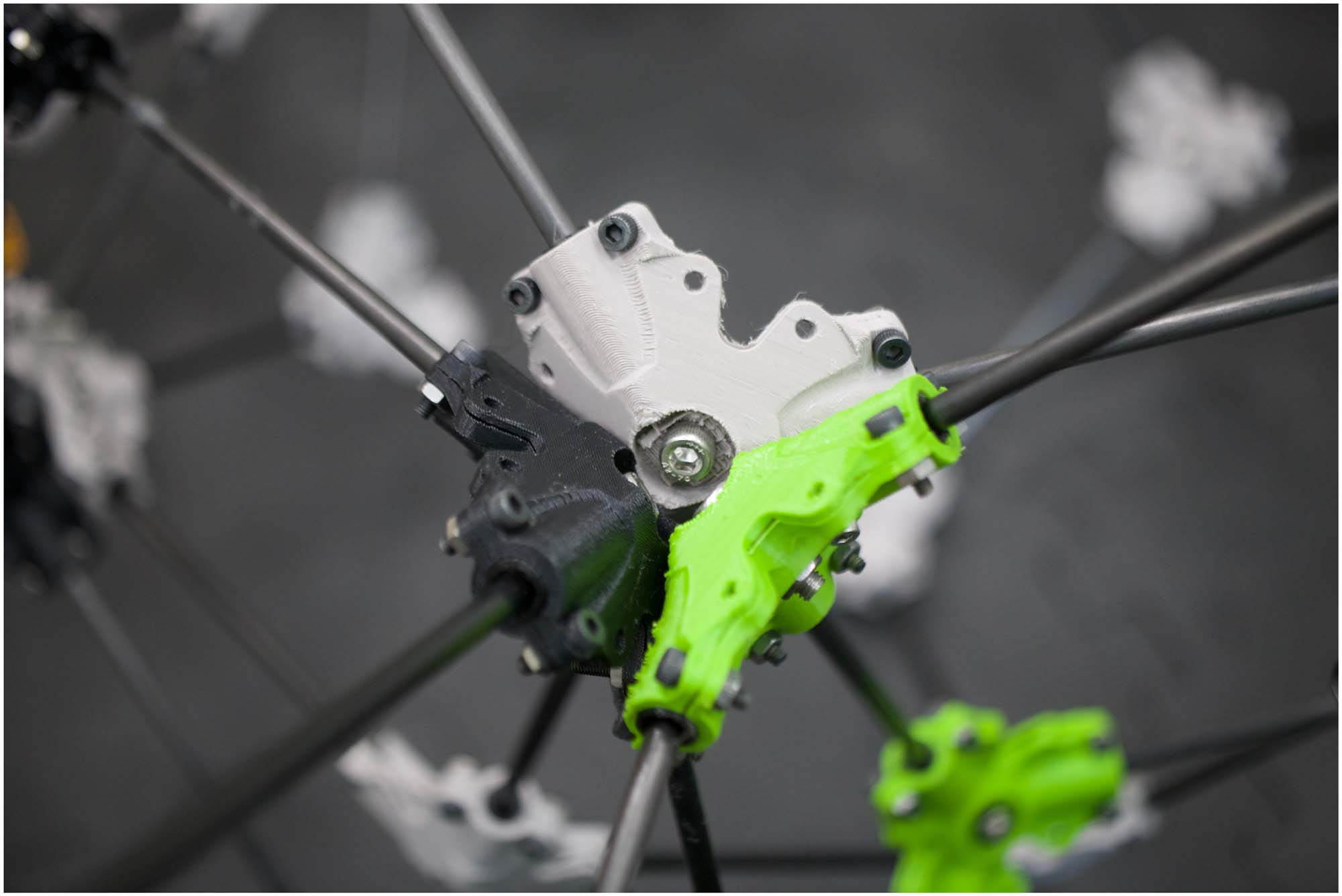
图6 三个模块连接形成的连接角结构
实验主要看两件事。
第一,模块化飞行器能不能在不同构型下实际飞起来。
第二,三维堆叠结构会不会因为旋翼气流互相干扰,导致悬停效率明显下降。
六、实验结果说明什么?
实验结果可以概括成三点。
1. 多种构型都能真实飞起来
作者用同一种模块,拼出了多种不同飞行器配置,并完成了飞行测试。
这说明 Dodecacopter 不是一个只在理论上可行的拼装概念。
它确实可以从单一模块出发,组装成不同多旋翼飞行器。
同一套模块可以飞成不同形态,这是模块化系统最直接的价值。
2. 三维构型能飞,但会有一定效率损失
三维构型里,有些旋翼不在同一水平面。
这样会带来一个问题:上层旋翼和下层旋翼的气流可能互相影响。
作者比较了六旋翼、四面体四旋翼和四面体十六旋翼在悬停时的电机输入。
结果显示,有旋翼重叠的三维构型悬停时平均电机输入大约增加 14%。
通俗说就是:
三维结构能飞,但会损失一些推进效率。
不过,作者也发现不同三维构型之间差异不明显,说明主要损失可能来自相邻层之间的气流干扰,而不是层数一多效率就无限恶化。
3. 原型偏重,但验证了结构多样性
论文中提到,当前模块原型每个约 1.7 kg。
对于这种尺寸来说,这个重量偏大,会限制全驱动飞行器做敏捷飞行。
重量偏大的原因主要来自复杂框架和大量连接点,尤其是快速原型制造时,为保证结构强度,零件会做得比较厚重。
但即便如此,作者仍然完成了多种构型、最多 16 模块的飞行测试。
这说明当前原型虽然还不是最终工程产品,但已经证明了一个关键点:
正十二面体模块确实能支撑丰富的模块化飞行器构型。
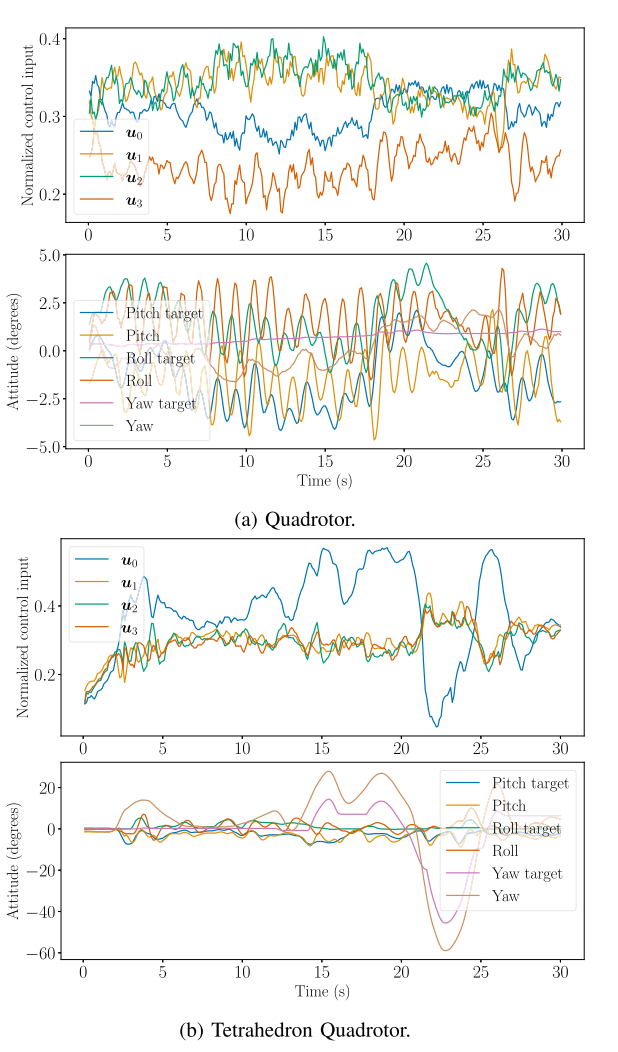
图7 不同构型悬停时的控制输入和姿态
七、论文画像
应用范围: 应用范围偏工程设计和模块化无人机方向。适合关注可重构无人机、模块化机器人、全驱动飞行器、多旋翼结构设计和空中操作平台的研究者。
复现友好度: 复现门槛较高。需要模块化机体设计、机械连接结构、飞控系统、多旋翼控制分配、结构分析和真实飞行测试条件。
方法新颖度: 较高。亮点不是单独提出一种控制器,而是从模块几何形状出发,系统性设计了可三维拼接的多旋翼模块,并进一步讨论结构、控制和优化配置。
思维借鉴度: 很高。它提供了一个很有意思的思路:机器人模块设计不是只看单个模块能不能用,而是要看模块形状能不能带来丰富、可描述、可优化的系统级构型。
技术完整度: 较高。论文覆盖模块设计、连接规则、可行构型描述、控制分配、结构刚度分析、混合整数优化和真实原型飞行测试,链条比较完整。
实验充分性: 中等偏充分。论文完成了多个真实构型飞行,并比较了三维构型的悬停效率。但当前原型较重,全驱动构型的敏捷飞行能力还需要后续轻量化和更系统验证。
最后总结
这篇 TRO 论文的核心价值在于:
它把模块化无人机从"平面拼几个旋翼"推进到"用十二面体模块在三维空间里构造不同飞行器"。
这篇文章最值得学的地方有三个。
第一,模块形状本身就是系统能力的一部分。
正十二面体不是为了造型特别,而是为了获得更多对称姿态、更多连接方式和更多旋翼朝向。
第二,模块化不是简单多拼几个。
真正有价值的模块化系统,需要能描述、能优化、能控制、能真实飞。
第三,三维构型很有潜力,但也有代价。
它能带来更高结构刚度、更紧凑布局和更丰富控制能力,但也会带来旋翼气流干扰、重量增加和控制复杂度。
记住一句话:
Dodecacopter 想证明的是:未来的多旋翼无人机,不一定是一架固定的机器,也可以是一套能按任务重新拼装的飞行积木。