1. 神奇的"预言术"
你是否有过这样的经历:开车行驶在不熟悉的城市路口,距离红绿灯还有两百米,导航突然淡定地播报:"请注意,红灯倒计时 15 秒","保持当前速度可通过三个绿灯"。
你半信半疑地放慢车速,滑行到路口时,读秒刚好结束,红灯变绿。那一刻,你甚至会怀疑导航软件是不是"黑"进了交管局的监控系统,或者在每个路口都安排了"线人"?
其实,这背后并没有什么魔法,而是一套结合了物联网协议、大数据众包采集与边缘计算的硬核科技。
2. 原理一:上帝视角------V2X 与智慧交通
最精准的数据来源,源于 V2X(Vehicle-to-Everything,车路协同)技术。传统的 V2X 通信主要以欧洲、美国以及日本推行的 DSRC 技术为主,又称车辆环境中的无线接入,主要应用于车辆之间的无线通信。由华为公司研发的 LTE-V 芯片以及网络侧设备路侧单元(Roadside Unit,RSU)已经在全球各 地进行了测试研究及应用示范,正走向规模化商用。5G 带来的低延迟与高容量,让路口传感器能够实时将信号灯状态'广播'给周围车辆。

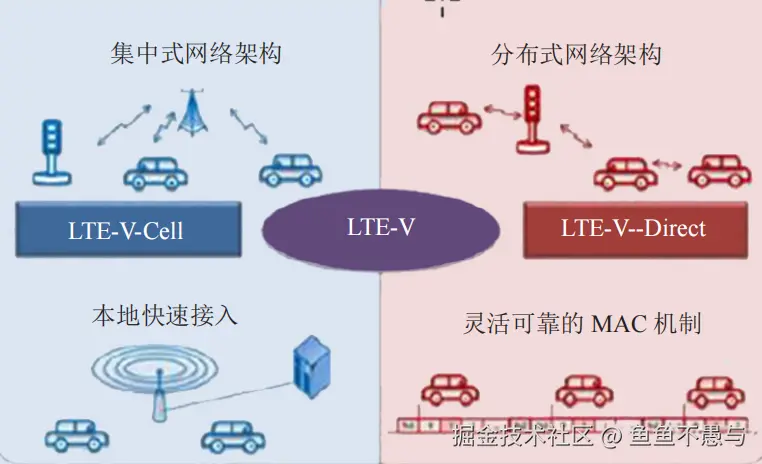
在很多"智慧城市"建设领先的地区(如北京亦庄、无锡、长沙等),交通灯不再是孤立的硬件,而是联网的 IoT 终端。
技术链路如下:
- 信号机采集:路口的交通信号控制机实时记录当前的相位(红、黄、绿)和剩余时间。
- 云端接入:数据通过 5G 或专网上传至"城市交通大脑"云端。
- 协议分发 :导航服务器通过标准协议(如 SPAT 协议,Signal Phase and Timing)获取这些实时数据。
- 终端显示:导航 App 结合你的 GPS 位置和车速,将倒计时精准推送到你的屏幕上。
后端收到的数据包结构模拟:
json
{
"intersection_id": "road_001",
"status": "red",
"remaining_time": 15, // 核心数据:剩余时间
"timestamp": 1729999999
}3. 原理二:群众的力量------大数据与概率模型
如果是在没有开放 V2X 接口的城市,导航是如何实现"盲猜"的呢?答案是:众包数据(Crowdsourcing) 。
当你开启导航时,你既是数据的接收者 ,也是数据的提供者。
3.1. 数据是怎么收集的?
你的手机会以固定的频率(如 1Hz)发送 "心跳包 💗 " 给服务器。除了经纬度,还包含以下传感器信息:
- GPS/北斗:确定你的位置和瞬时速度。
- 加速度计:感知刹车和起步的瞬间。
- 陀螺仪:判断车辆在路口的偏转(左转还是直行)。
3.2. 专利背后的"拼图算法"
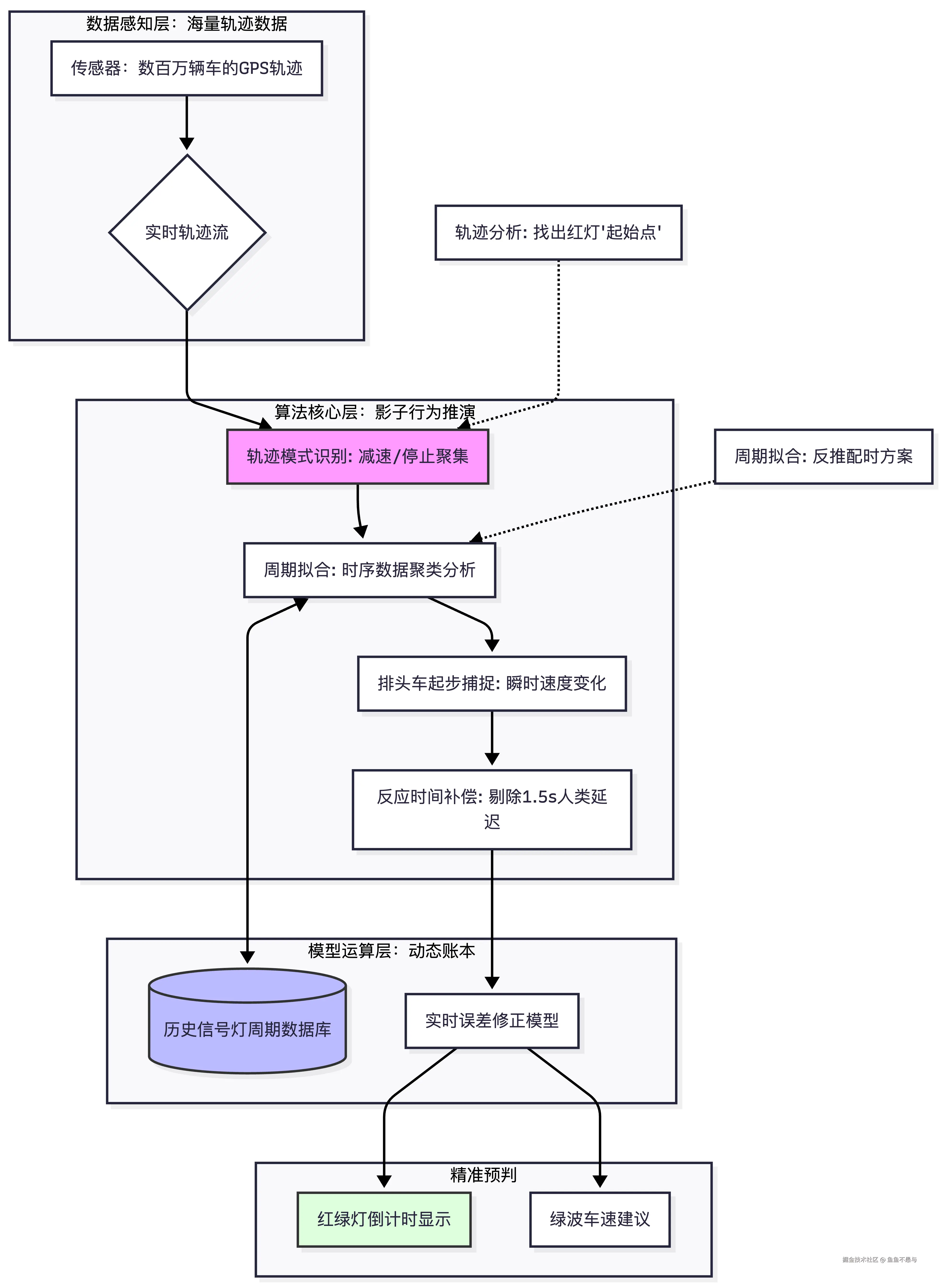
参考高德地图最新专利 CN118736870B,算法其实是在玩一个"影子游戏"。它看不见红绿灯,但它能看见成千上万个"萤火虫"(车辆)流动的规律:
- 轨迹分析:算法会监控该路口所有用户的 GPS 轨迹。如果大量车辆在同一位置突然减速并停止,且停止时长呈现周期性规律,系统就会标记出红灯的"起始点"。
- 周期拟合:大部分红绿灯都有固定的配时方案(例如:红灯 60s,绿灯 40s)。通过对历史轨迹大数据的挖掘,AI 模型可以反推出该路口的信号灯周期。
- 实时校准:当第一辆排头车起步时,算法会立即捕捉到这个"瞬时速度变化",从而修正云端预测的倒计时误差。
- 反应时间补偿:人类起步会有 1.5s 左右的延迟。算法会通过模型剔除掉排头司机的"反应时间误差",从而给出比实际肉眼观察更精准的步进预判。
轨迹分析 和周期拟合,简单举个例子来说就是:算法在心里记账。比如:第一辆车10:00:05起步,第二辆车10:00:07起步......它观察了几百次后发现,这个路口的绿灯总是每隔90秒出现一次。那么,它就能推算出下一次绿灯大概在10:01:35。
这本质上是一个大规模时间序列预测问题。即使没有官方数据,只要路口跑的车够多,算法就能无限接近真实情况。
3.3. 合作商数据(B端与政府端)
除了个人手机,导航公司还有很多"大客户"数据:
- 网约车/出租车:这些车辆通常全天候开启 GPS 且打点频率极高,是最高质的"路况播报员"。
- 物流车/公交车:这些车辆轨迹极度稳定,是算法校准周期的重要参考。
- 路侧单元(RSU) :在智慧城市试点路口,路边的摄像头和雷达会自动识别车流,并把这些汇总后的特征数据传给地图厂商。
这里说个题外话,很多人担心: '我的一举一动都被地图监控了吗?'
其实,厂商在收集这些轨迹数据时,会进行'时空脱敏'处理。采集到的数据通常是匿名 ID,且会切断起终点(比如你家和公司),只保留中间路段的特征。对于红绿灯算法来说,它并不关心'你是谁',它只关心'在这个坐标点上,又有多少个点变为了 0 速度'。
其实,这就是'数据可用不可见'的艺术。地图厂商处理轨迹时,就像是给数据做了一场'化装舞会'------抹去ID、模糊起点、切断终点。算法只盯着路口的规律跳动,而不在意是谁在跳。未来的技术边界,将通过'端侧处理'(边缘计算)进一步夯实:数据不出手机,仅提取特征上传,既保护了我们的隐私,又保障了国家的安全边界。
4. 为什么有时候会"翻车"?
尽管有黑科技加持,但倒计时偶尔也会"卡壳"或者干脆不显示。这通常是由以下几个原因造成的:
- 感应式信控:有些路口埋有地磁感应,根据车流量动态调整绿灯时长。由于没有固定周期,算法很难预判下一秒会发生什么。
- 人工接管:高峰期交警现场手动切换信号灯,这种随机性操作会直接导致云端模型失效。
- 网络延迟(Latency) :从信号机到云端再到手机,链路经过多次转发。如果 5G/4G 网络波动,你看到的"1秒"可能已经是过去式了
5. 进阶黑科技
5.1. 绿波速度建议
有些高端玩家可能发现,导航有时会提示:"保持车速 45km/h,你将一路绿灯"。
这叫 GLOSA(绿波带速度建议) 。它通过计算你当前位置、车速与前方路口绿灯开启的"时间窗口",给出最优驾驶建议。这不仅减少了刹车磨损,更是降低碳排放的黑科技。
5.2. 算法的"读心术"------卡尔曼滤波
如果说轨迹分析是"记账",那卡尔曼滤波就是算法的"内心博弈"。
在现实中,导航面临的数据充满了噪声:GPS 信号会在高楼间产生漂移,手机网络会断连,甚至路口的车辆起步速度也各有不同。面对这些"不完美"的数据,算法是如何保持冷静的?
这就是卡尔曼滤波(Kalman Filter)的功劳。 它是控制工程界最经典的预测算法,在导航里,它主要扮演两个角色:
- "去伪存真"的过滤器 :
算法不会盲目相信任何单次测量。当 GPS 数据告诉它"车在左转",但惯性传感器(加速度计)显示"车在匀速直行",卡尔曼滤波会根据两者各自的"置信度"进行加权计算,得出最接近真实状态的轨迹。 - "预测与修正"的循环 :
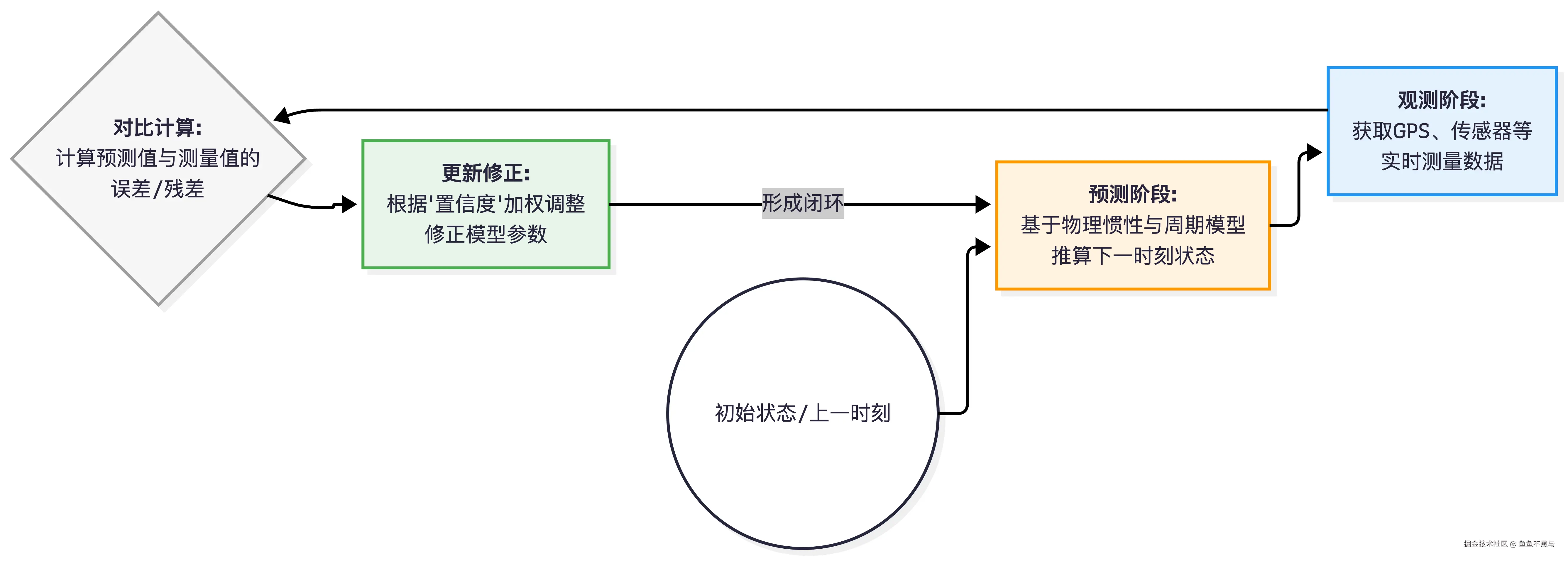
卡尔曼滤波本质上是一个不断循环的过程:
-
- 预测(Predict) :基于当前的红绿灯周期规律,预测下一秒车辆的位置和信号灯状态。
- 更新(Update) :当真实的 GPS 轨迹点上传,系统将"预测值"与"测量值"进行比对,计算误差(残差),并修正模型。
- 循环往复:随着车辆源源不断地经过,预测模型会越来越精准。
简单来说:
导航算法不是在"看"红绿灯,它是在根据已知规律不断"盲猜",并在每一次真实观测中修正自己的"盲猜"。即便你在隧道里短暂丢失了 GPS 信号,凭借卡尔曼滤波,算法依然能根据你进入隧道前的速度和方向,精准推算出你大概率已经经过了路口。
5.3. 单一 GPS向"多模态环境感知"转型
有人调侃:"导航到了地下车库就是睁眼瞎。"确实,当卡尔曼滤波失去了 GPS 这个"测量基准"后,导航便陷入了漂移的迷宫。
但未来并不是死局。随着 VPS(视觉定位) 与 UWB(超宽带)室内GPS 技术的成熟,导航正在经历一场"从盲人摸象到实景识别"的进化。未来,你的手机摄像头会瞬间识别地库里的立柱编号,瞬间修正漂移,让你在地库也能享受"无感导航"。未来的导航,看的不只是经纬度,而是世界本身。
6. 原来如此
总结来说,导航红绿灯倒计时是 "官方政务数据开放" 与 "民用大数据算法预测" 共同交织的产物。它体现了智慧城市从"冷冰冰的硬件"向"有温度的服务"的跨越。
原来如此,你学会了吗?
7. 文献参考
- 1缪立新,王发平.V2X车联网关键技术研究及应用综述J.汽车工程学报,2020,10(01):1-12.
- 2 专利文献:高德地图《红绿灯倒计时的确定方法、装置及存储介质》,专利号:CN118736870B。
- 3 Hofleitner, A., Herring, R., Abbeel, P., & Bayen, A. M. (2012). Learning the Dynamics of Arterial Traffic From Probe Data Using a Dynamic Bayesian Network . IEEE Transactions on Intelligent Transportation Systems.
互动环节:
你在使用导航时,觉得哪家的红绿灯倒计时最准?有没有遇到过倒计时结束还没变灯的瞬间?欢迎在评论区分享你的经历!
下一期预告:
《原来如此 | 第02期:扫码支付时,即使没网络为什么也能扣款?》------深度拆解离线支付背后的非对称加密逻辑。
关注我的专栏《原来如此》,带你拆解生活场景背后的硬核底层架构!