/*
send a new set of GPS UBLOX packets
*/
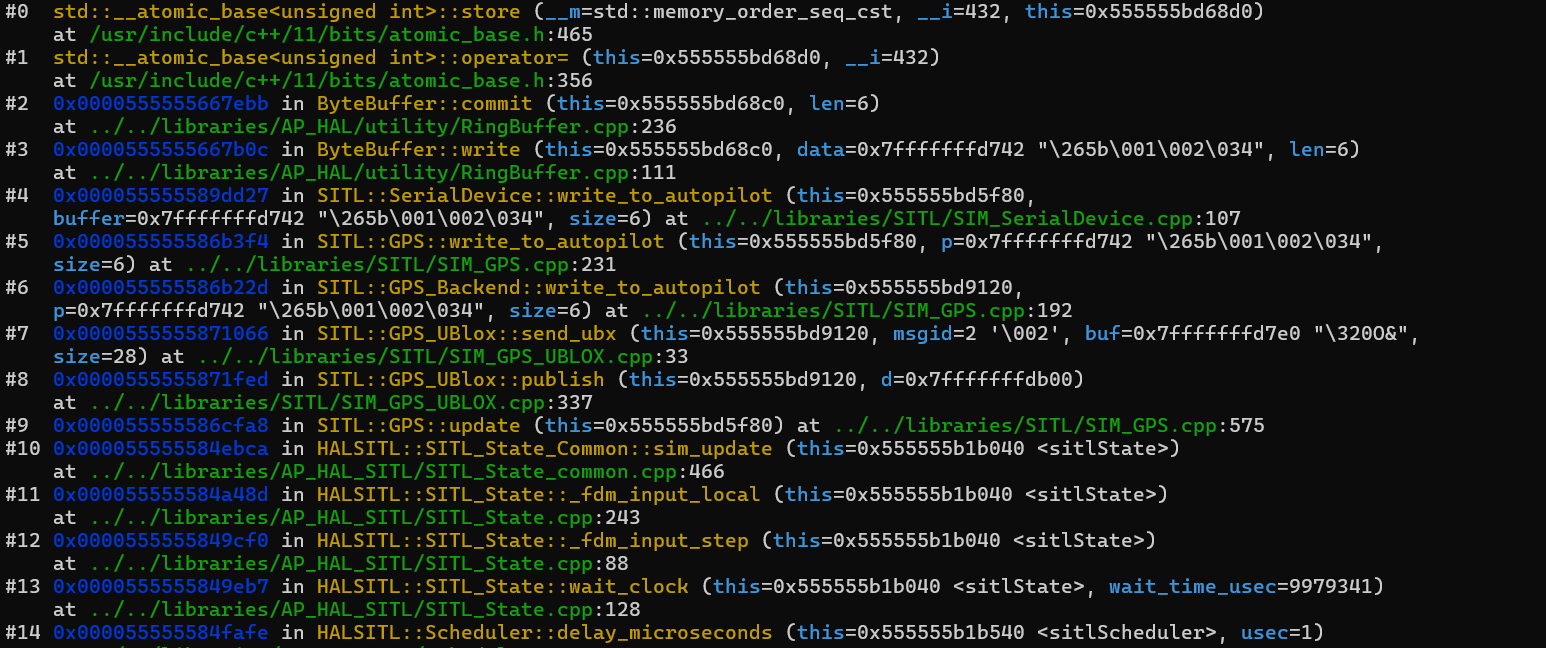
void GPS_UBlox::publish(const GPS_Data *d)
$25 = (const SITL::GPS_Data *) 0x7fffffffdb00
(gdb) p *d
$26 = {timestamp_ms = 9779, latitude = -35.3632621, longitude = 149.1652374, altitude = 584.090027, speedN = 0, speedE = 0, speedD = 0,
yaw_deg = 352.99999475479126, roll_deg = 0, pitch_deg = 0, have_lock = true, horizontal_acc = 0.300000012, vertical_acc = 0.300000012, speed_acc = 0,
num_sats = 10 '\n', fix_type = 6 '\006'}
pos.time = gps_tow.ms;
pos.longitude = d->longitude * 1.0e7;
pos.latitude = d->latitude * 1.0e7;
pos.altitude_ellipsoid = d->altitude * 1000.0f;
pos.altitude_msl = d->altitude * 1000.0f;
pos.horizontal_accuracy = d->horizontal_acc*1000;
pos.vertical_accuracy = d->vertical_acc*1000;
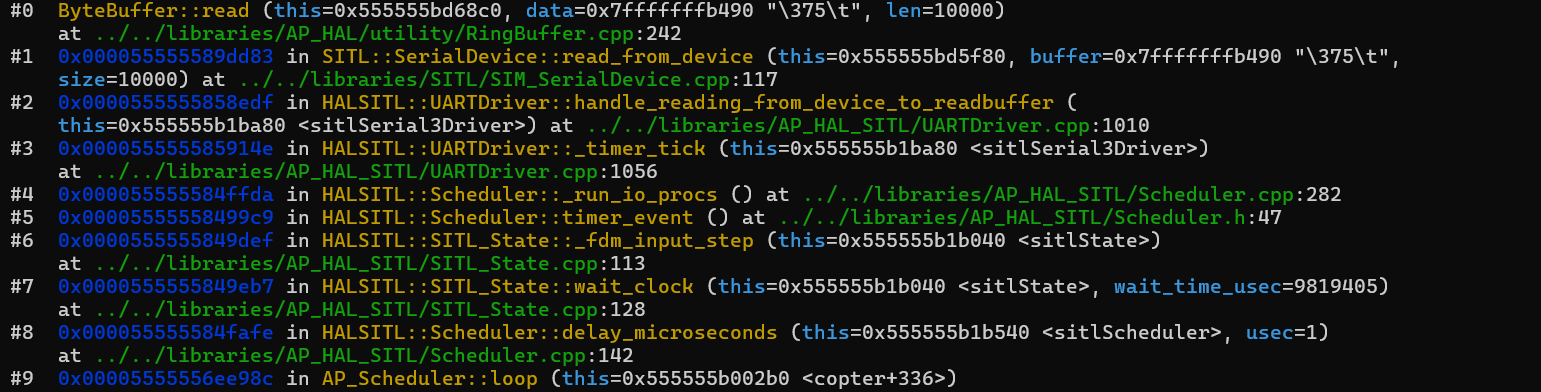
/////////////// 这里是读到AP_GPS_UBLOX::read里面m
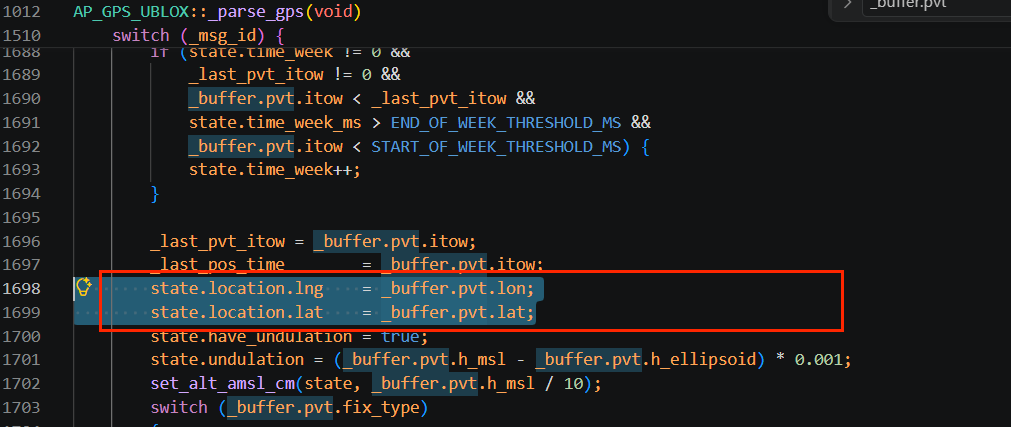
state.location.lng = _buffer.pvt.lon;
state.location.lat = _buffer.pvt.lat;
p AP_GPS::get_singleton()->state0.location.alt
$55 = 68406
(gdb) p ((HALSITL::Scheduler*)hal.scheduler)._sitlState.sitl_model.smoothing

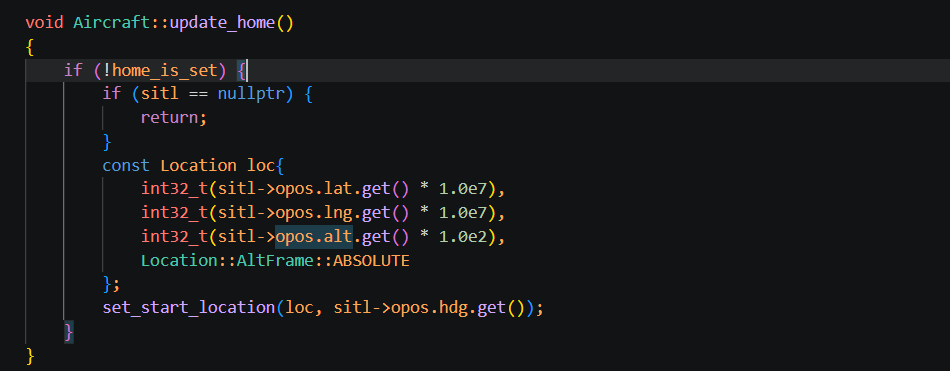
p &SITL::SIM::_singleton.opos.alt._value
这个来自与参数
SIM_OPOS_ALT,13
SIM_OPOS_HDG,353
SIM_OPOS_LAT,30.22791
SIM_OPOS_LNG,120.2794

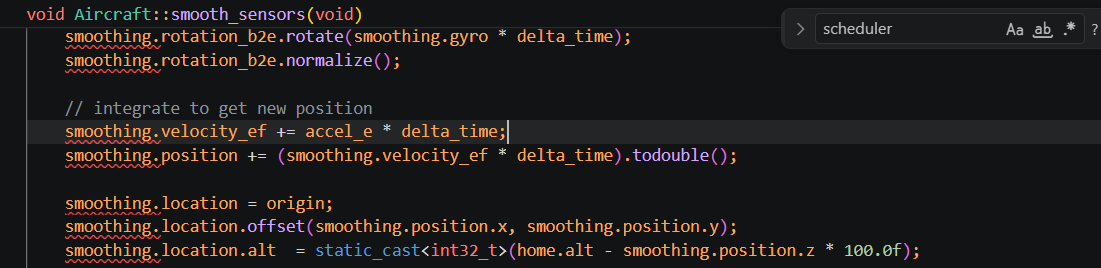
设置到home 并且同步到location
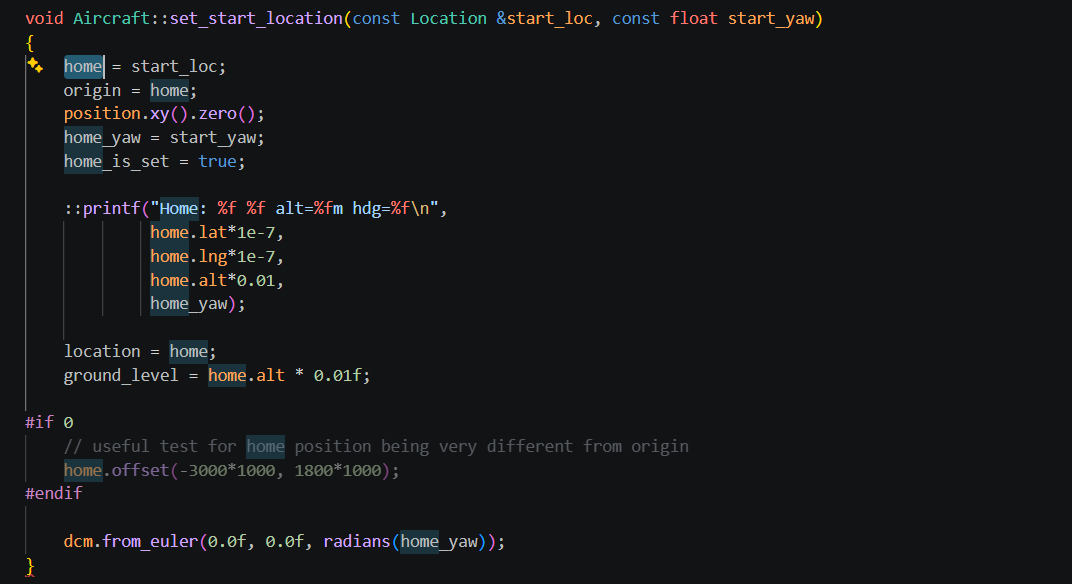
location.alt = static_cast<int32_t>(home.alt - position.z * 100.0f);
(gdb) p ((HALSITL::Scheduler*)hal.scheduler)._sitlState.sitl_model.position.x
$10 = 0
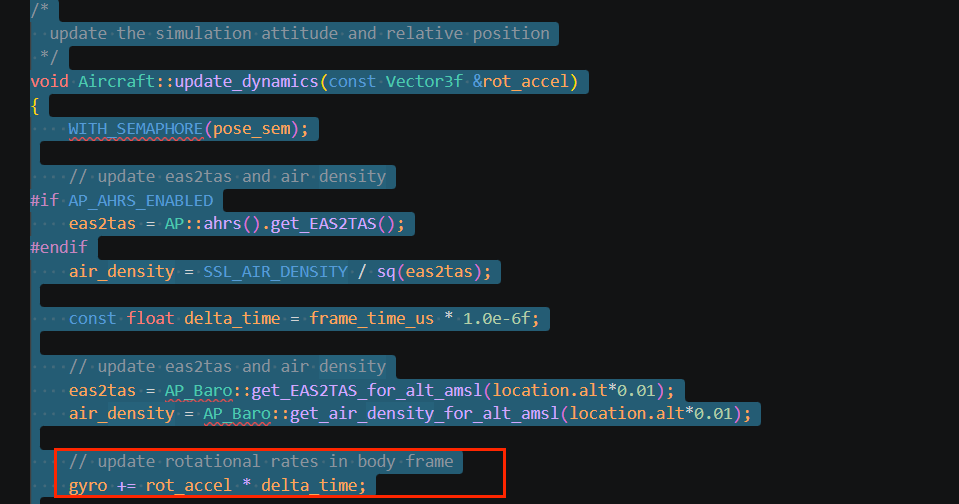
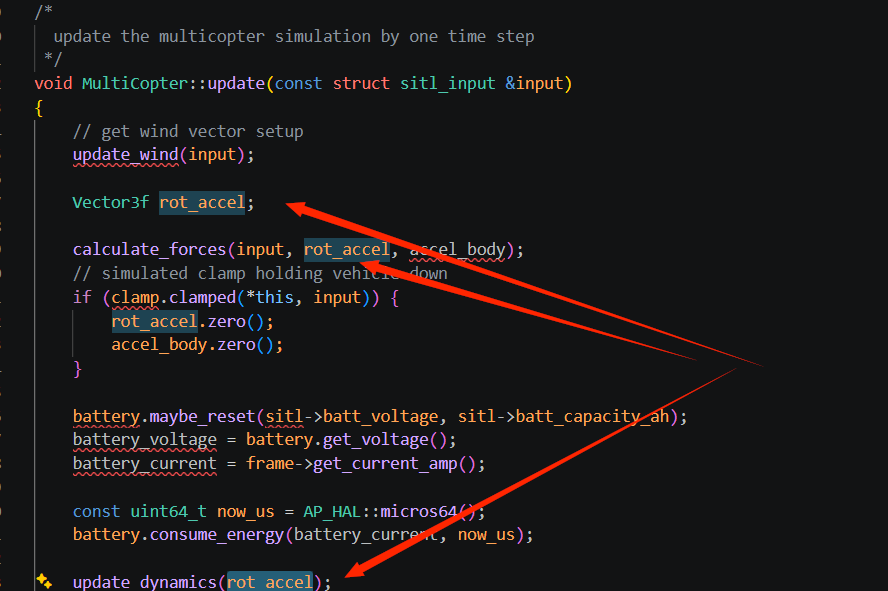
void Aircraft::update_dynamics(const Vector3f &rot_accel)
position.z = -(ground_level + frame_height - home.alt * 0.01f + ground_height_difference());
///////
然后 position.z的更新在sim里面变得巨复杂 根据电机推力反算模拟.
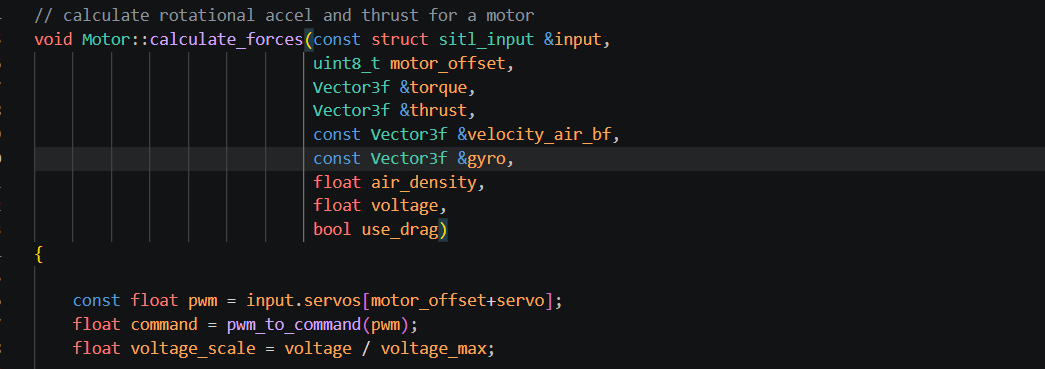
数据流:从 PWM 到推力
-
读取 PWM 指令 :
const float pwm = input.servos[motor_offset+servo];- 从
input.servos数组里,找到控制这个电机的 PWM 值(通常是 1000 到 2000 之间的整数)。
- 从
-
转换为归一化指令 :
float command = pwm_to_command(pwm);- 把 PWM 值转成一个标准化的油门指令(通常是 0 到 1 或 -1 到 1),方便计算。
-
电池电压修正 :
float voltage_scale = voltage / voltage_max;- 根据当前电池电压修正推力值。电压低了,推力会相应减小,模拟真实电池的掉压效果。
-
计算推力 (核心) :
float motor_thrust = calc_thrust(command, air_density, velocity_in, voltage_scale);- 调用
calc_thrust函数,结合油门指令、空气密度和入流速度,计算出此时电机产生的实际推力大小(牛顿)。
- 调用
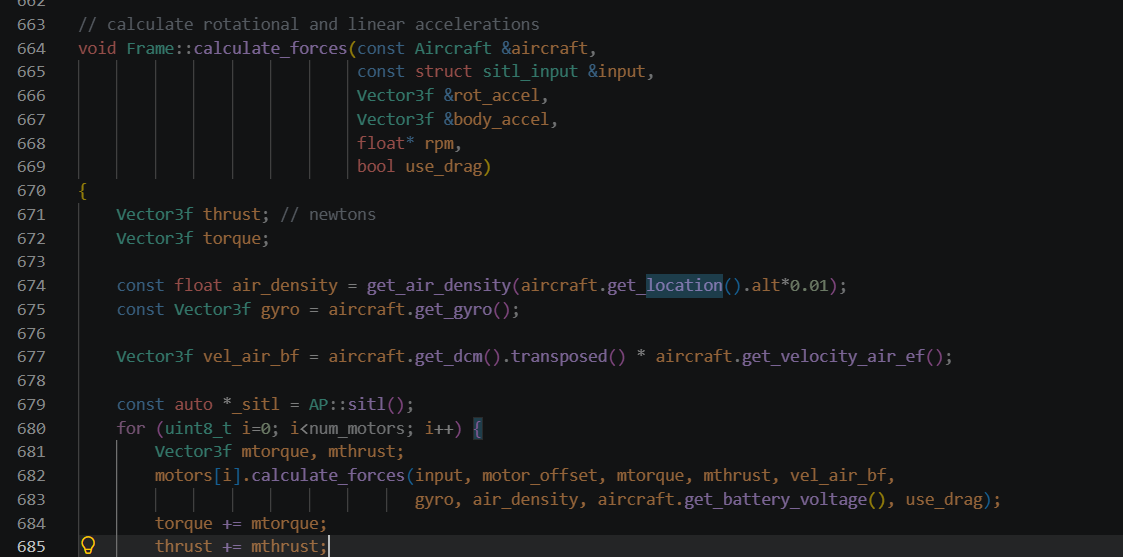
输出参数
断点打在Motor::calculate_forces
void Motor::calculate_forces(...,
Vector3f &torque, // 输出1
Vector3f &thrust, // 输出2
...)| 输出参数 | 类型 | 单位 | 说明 |
|---|---|---|---|
torque |
Vector3f& |
牛米 (N·m) | 该电机对飞机产生的扭矩向量(机体坐标系) |
thrust |
Vector3f& |
牛顿 (N) | 该电机产生的推力向量(机体坐标系) |
一直觉得很多数学公式学了 但是实际用不到就忘记了. 但是在无人机里面这里的数学实用性就体现出来了.
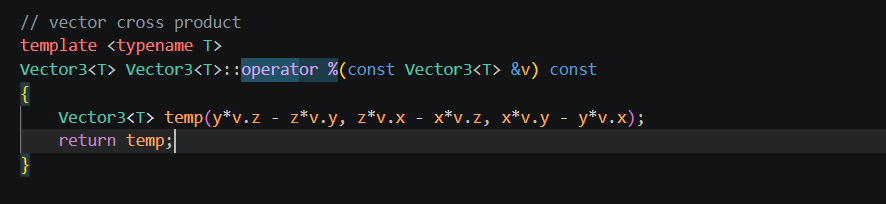
回忆下线性代数里面的矩阵叉乘
代码里面这个算法中两处用到了这个
// add velocity of motor about center due to vehicle rotation
motor_vel+= -(position **%**gyro);
// calculate total torque in newton-meters
torque= (position % thrust) + rotor_torque;
这里的%被重载为叉乘
看下物理意义
物理背景:力矩的定义
在物理学中,力矩(Torque) 的计算公式是:
text
τ = r × F
= 力臂 × 力(叉积)其中:
-
r:力的作用点相对于重心的位置向量(力臂) -
F:力向量 -
×:叉积
叉积的结果是一个向量,其:
-
大小 =
|r| × |F| × sin(θ)(旋转的"强度") -
方向 = 旋转轴的方向(右手定则)
举个栗子
右前电机(position = {0.2, 0.2, 0},thrust = {0, 0, -5.0})
τ=p×f=(−1.0, 1.0, 0)
roll 逆时针
pitch 顺时针
yaw 不变
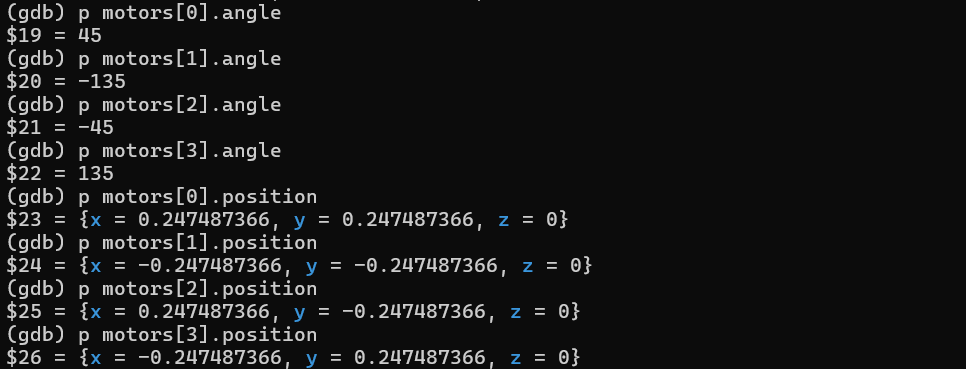
电机布局(X 型)
| 索引 | 位置 | 方向 | 说明 |
|---|---|---|---|
| 0 | {x: 0.247, y: 0.247} |
右前 | 正桨 (yaw_factor = 1) |
| 1 | {x: -0.247, y: -0.247} |
左后 | 正桨 (yaw_factor = 1) |
| 2 | {x: 0.247, y: -0.247} |
右后 | 反桨 (yaw_factor = -1) |
| 3 | {x: -0.247, y: 0.247} |
左前 | 反桨 (yaw_factor = -1) |
////////// gyro根据角动量加速度更新