##################################################
此处来自立创开源机器人:https://oshwhub.com/gshaoburuchuan/project_oajuxfqg
本文只做深度解析,不作任何商业用途,详情请看以上链接,
#################################################
电山派主要负责给其他板子供电
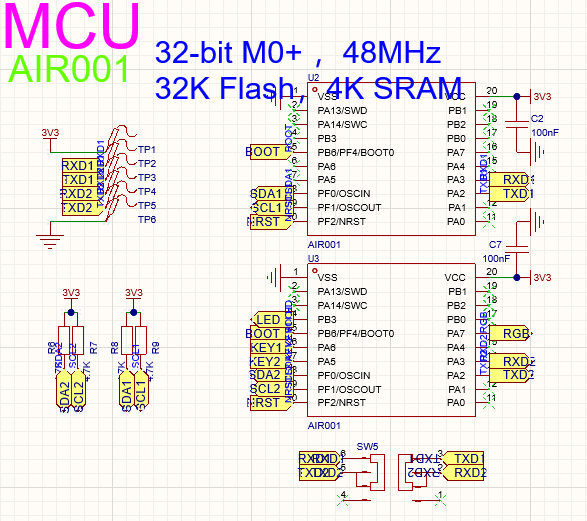
1.MCU
MCU采用AIR001,这个MCU我没用过
2.电池充电
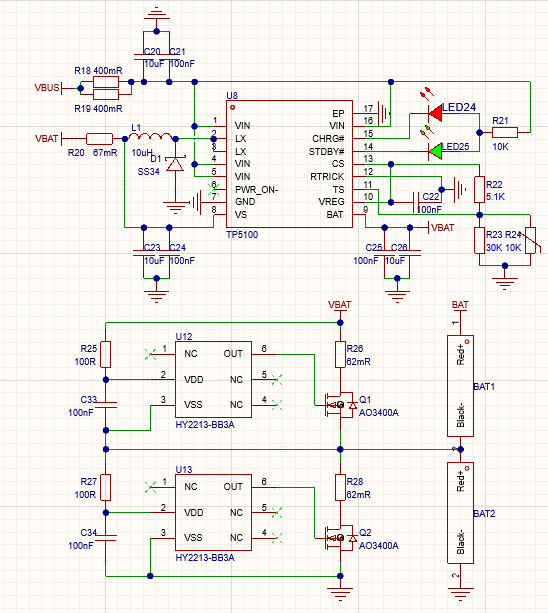
TP5100 是一款开关降压型(双节8.4V/单节4.2V)锂电池充电管理芯片。其QFN16超紧凑型封装和简单的外围电路,使TP5100非常适合大电流充电管理应用的便携式设备。同时,TP5100内置输入过流保护、欠压保护、过温保护、短路保护、电池温度监测和电池反接保护.
C20,C21 是电源输入电容
R18,R19 是耗散电阻,主要作用:
①限制浪涌电流:在插拔电池或电源瞬间,电路板上的大电容(如 10uF)相当于短路。这两个 400mΩ 的电阻能有效抑制冲击尖峰,保护 TP5100 内部的功率管不被击穿。
②分担热耗散(功率吸收):当输入电压较高(如 12V)且充电电流为 1.5A 时,降压芯片本身的压差较大,发热严重。串入这两个电阻,可以让 电阻发热 来替代 芯片发热,将一部分功耗转移到电阻上。
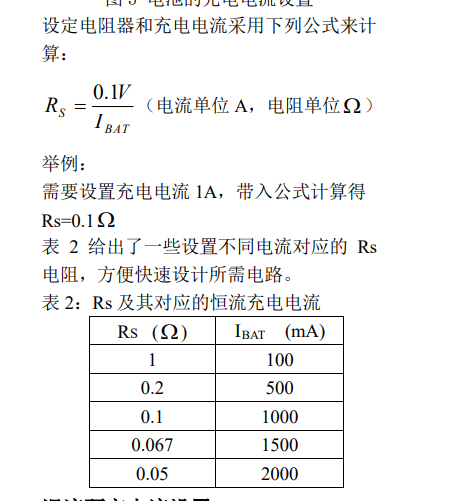
R20 是电流检测电阻,设置电流充电电流Rs=0.1V/0.067=1.49A
 D1 续流二极管,电感L1放电回路
D1 续流二极管,电感L1放电回路
C23,C24 输出电容
C25,C26 电池电压检测端。将电池的正端连接到此管脚。
R23,R24 电池温度检测输入端。将TS 管脚接到电池的 NTC(负温度系数热敏电阻)传感器的输出端。如果 TS 管脚的电压小于 VREG 的 45%或者大于 VREG电压的 80%,意味着电池温度过低或过高,
则充电被暂停。如果 TS 直接接 GND,电池温度检测功能取消,其他充电功能正常。这两个阻值需要根据实际的电池参数来确认,具体计算方式见datasheet,待设定的温度范围与电压 VREG 是无关的,仅与
R1、R2、RTH、RTL 有关;其中,RTH、RTL 可通过查阅相关的电池手册或通过实验测试得到。
3.电池保护
①工作原理:
正常充电:当BAT1电压低于4.2V时,U12的OUT引脚输出高电平,Q1的栅极(G)为高电平,Q1保持截止状态。充电电流正常流过BAT1。
过充检测与均衡:随着充电进行,BAT1电压上升至4.2V。U12检测到后,其OUT引脚变为低电平,将Q1的栅极拉低。这使得Q1导通。
分流泄放:Q1导通后,与R26 (62mΩ) 形成一条并联在BAT1两端的分流支路。一部分充电电流会通过这条支路被消耗掉,从而减缓BAT1的充电速度,等待电压较低的BAT2"追上"。
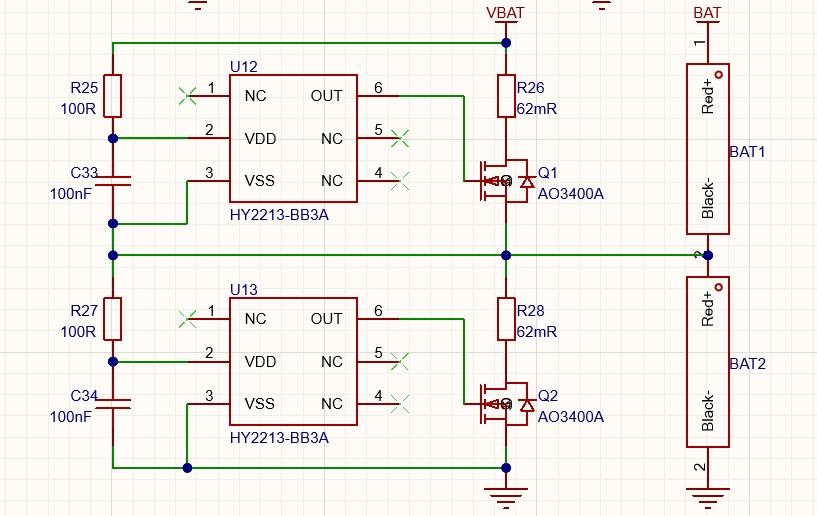
②过充保护机制
该电路不仅实现均衡,也提供过充保护:
硬件关断:当电池电压超过4.2V的阈值,Q1会持续导通,通过R26进行大电流泄放。
电压回落与恢复:当电压被泄放至4.19V的过充释放电压以下时,U12的OUT引脚会重新变为高电平,Q1截止,泄放支路被切断,电池恢复正常充电。
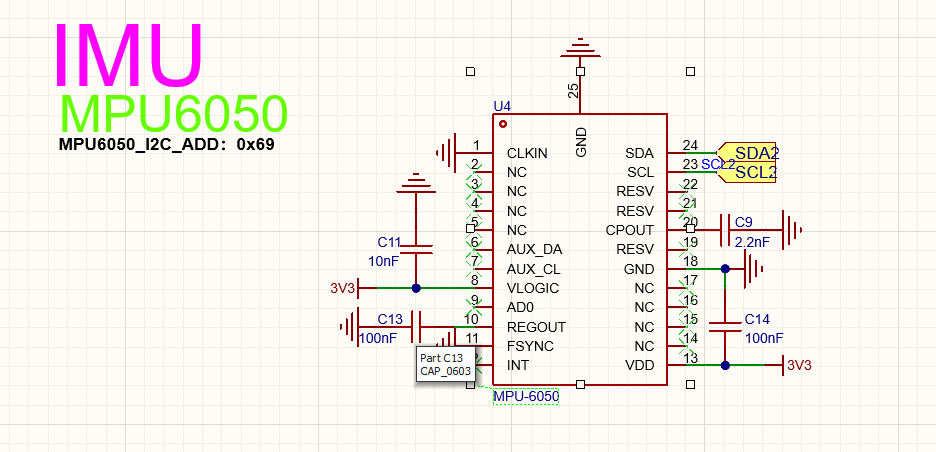
4.六轴运动传感器
5.快充
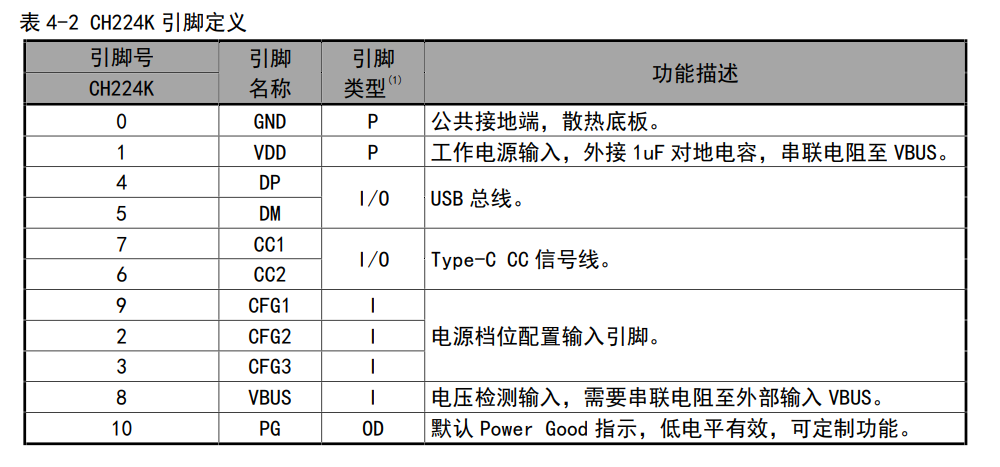
CH224K 是由南京沁恒微电子(WCH)出品的一款USB PD受电端协议芯片,简单来说,它通过CH224K芯片与PD充电头通信,电阻R14,让充电头输出指定的电压
通过配置电阻R14,此项目中设置24K,请求充电电压12V
CC1 和 CC2 引脚直接连接到USB-C接口的CC1和CC2引脚。作用:这是CH224K与PD充电头进行协议握手和电压协商的通信线路。芯片通过这两条线发送请求,并接收充电头的响应。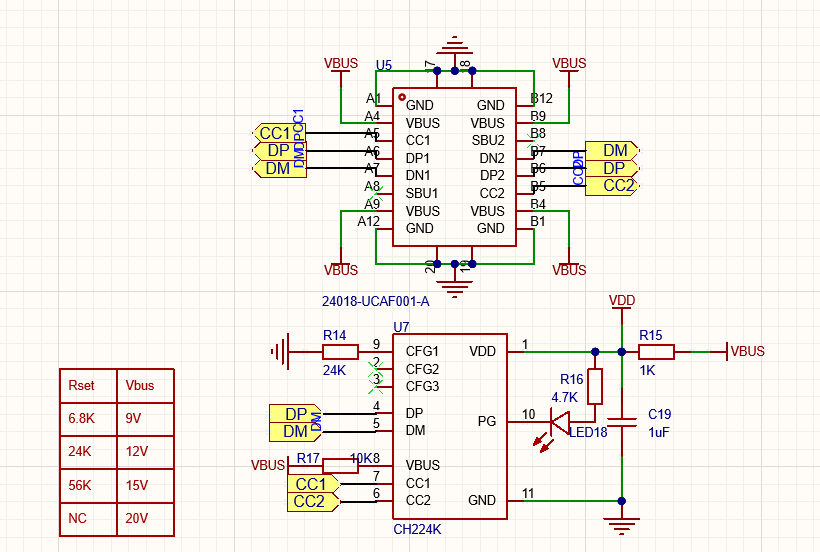
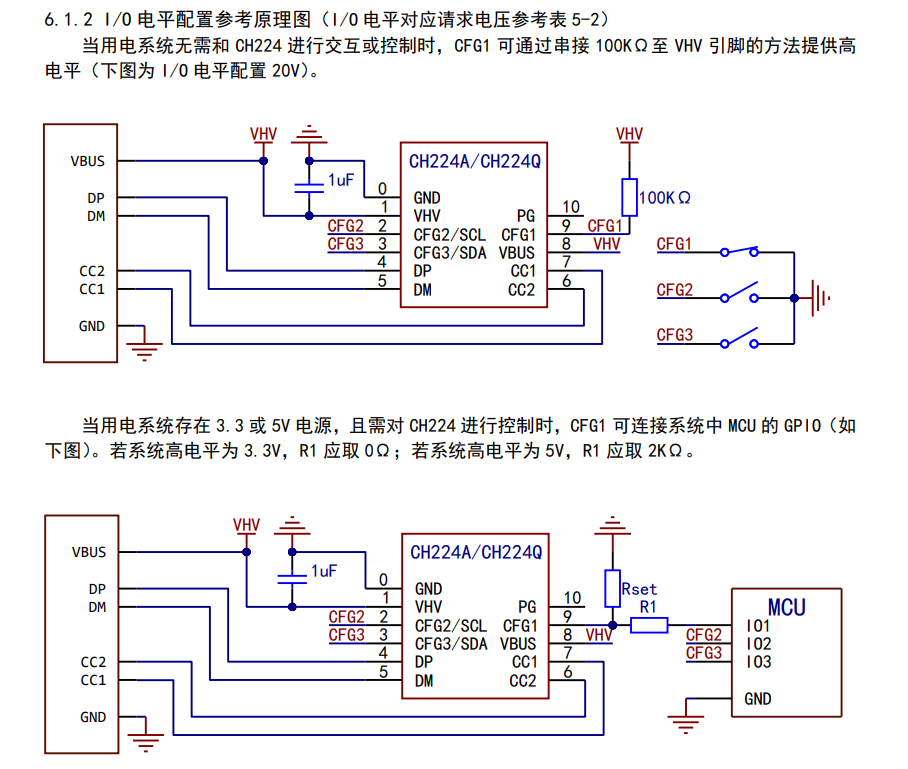
拓展:当你的系统需要跟CH224A通信或者不用跟CH224通信,可以采用以下电路
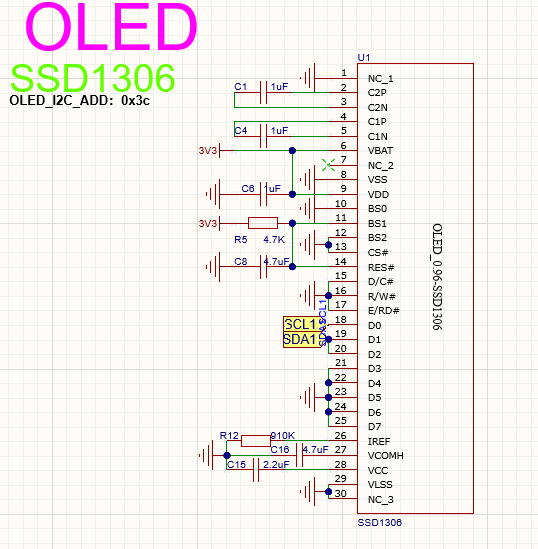
6.OLED
采用SSD1306核心芯片的OLED屏,通信接口I2C