① 引言(Introduction)
1.1 研究背景与行业痛点
2026年夏季达沃斯论坛将物理AI(Physical AI)列为核心议题,英伟达CEO黄仁勋将其称为"下一波AI增长浪潮",市场研究机构预测物理AI市场规模将在2040年达到3.26万亿美元。与此同时,智元机器人第15000台具身机器人量产下线,五部门联合启动工业5G独立专网试点------这些事件共同指向一个趋势:AI正在从数字空间走向物理世界,而制造业是这场变革的核心战场。
然而,当前制造企业的AI应用仍面临三重困境。第一,感知与理解脱节 :产线上数以千计的传感器产生海量数据,但AI模型只能识别统计模式,无法理解设备故障背后的物理因果。第二,推理与解释缺失 :深度学习模型如同"黑箱",能预测设备何时可能故障,却说不出"为什么"------而工程师需要的是因果链,不是概率值。第三,决策与执行断裂:从数据分析到指令下发,中间需要人工判断、开会讨论、手动调整,整个闭环周期长达数小时,无法满足柔性制造对实时响应的需求。
这三重困境的根源在于:当前工业AI系统本质上是"数字AI"------它们在数字空间中处理符号和数据,却无法感知物理世界的因果律、物质约束和动态演化。
1.2 现有方案与局限
现有工业AI方案主要沿两条路径展开。数据驱动路径 以深度学习为核心,通过CNN/LSTM/Transformer等模型从历史数据中学习模式,在质量检测、故障分类等任务中取得了一定效果,但缺乏可解释性,且对罕见故障(数据稀疏场景)泛化能力差。知识驱动路径以专家系统和规则引擎为代表,依赖人工定义的if-then规则,可解释性强但难以应对复杂多变的制造环境,知识更新成本高。
近年来,知识图谱在制造业中的应用为解决数据孤岛问题提供了新思路------通过将设备、工艺、物料、故障等实体及其关系显式化为图结构,实现了跨MES/ERP/PLM系统的语义整合。但现有方案仍以静态知识查询为主,缺乏与物理世界实时交互和自主推理的能力。
1.3 本文贡献
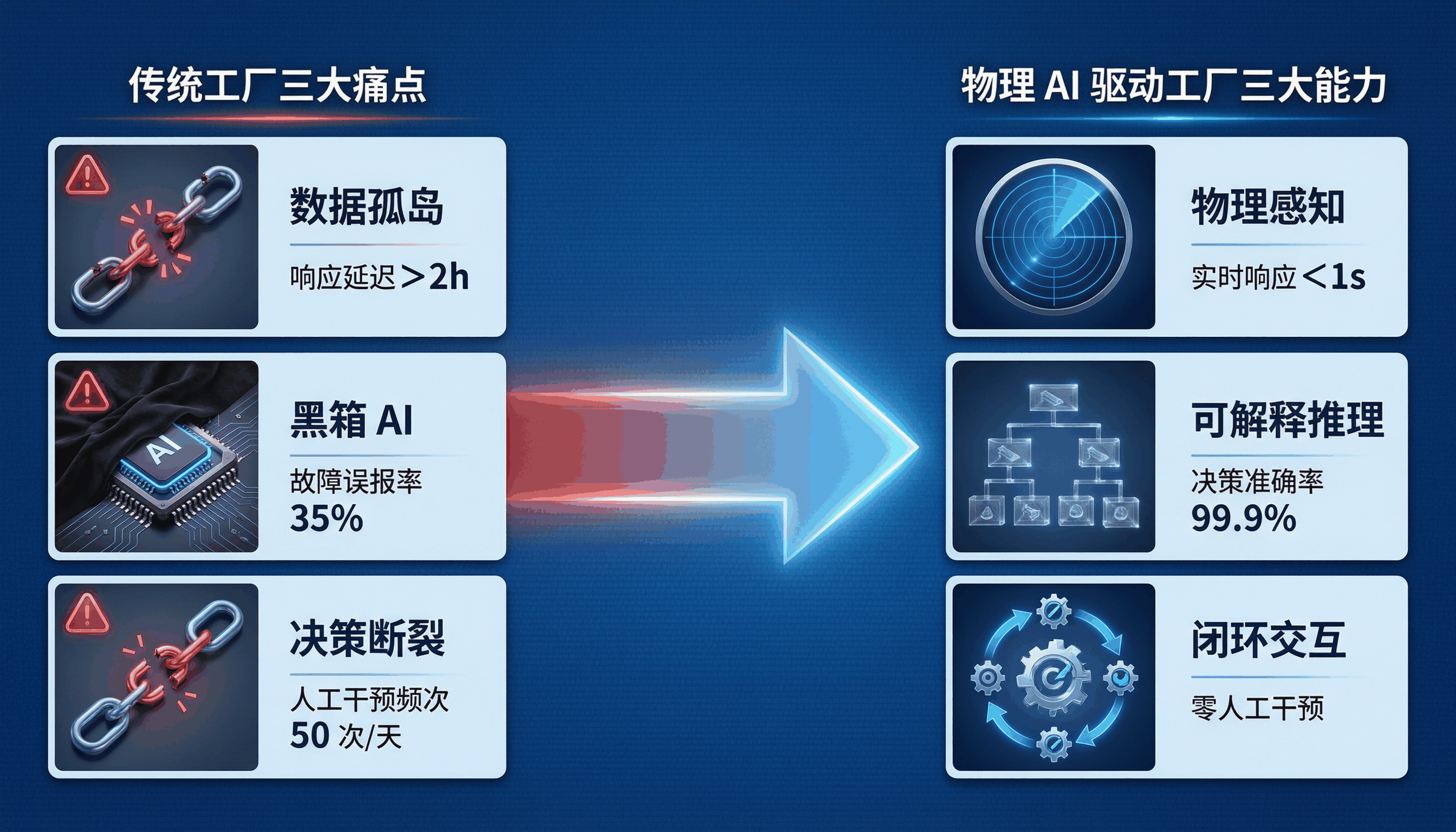
图1:传统工厂痛点 vs 物理AI驱动工厂(背景与痛点)
本文的核心主张是:物理AI不应仅是数字AI的"物理扩展",而应是一种全新的智能范式------它从物理定律出发理解世界,通过知识图谱承载制造领域知识,借助神经符号AI实现可解释推理,最终经由具身智能体完成物理交互。基于这一主张,本文提出三项贡献:
-
定义物理AI赋能智能制造的四维能力模型:物理感知(Perception)→ 物理推理(Reasoning)→ 世界建模(Modeling)→ 具身交互(Interaction)
-
提出知识图谱增强的制造智能体架构:以知识图谱为语义底座、神经符号AI为推理引擎、数字孪生为交互桥梁的三层架构
-
分析典型应用场景与落地路径:结合工业5G、具身机器人等产业趋势,阐述预测性维护、工艺优化、质量管控三大场景的实施方案
② 技术综述与技术选型(Related Work)
2.1 核心技术概念界定
物理AI(Physical AI) 是指将物理定律融入AI系统,使其具备感知物理世界、理解物理因果、预测物理演化、操控物理实体的能力。与传统的数字AI(处理文本、图像等符号信息)不同,物理AI运行在封闭的"感知→决策→行动"反馈回路中,受物理定律、因果约束和热力学限制的支配。其核心特征可归纳为四个维度:
-
物理感知(Physical Perception):从多模态传感器数据中提取物理状态信息,不仅识别"是什么",更理解"为什么"------例如,从振动频谱中识别出轴承磨损的物理机制,而非仅给出"故障概率85%"
-
物理推理(Physics Reasoning):基于物理定律和因果逻辑进行推断,能够回答"如果调整这个参数,会发生什么"的反事实问题
-
世界建模(World Modeling):构建物理环境的动态数字表征,能够预测未来状态演变------这正是数字孪生的核心价值
-
具身交互(Embodied Interaction):通过机器人、执行器等物理实体与真实世界进行交互,完成感知-决策-执行的完整闭环
知识图谱(Knowledge Graph) 在制造业中扮演"语义底座"的角色:通过"实体-关系-属性"三元组框架,将设备、工艺、物料、故障、标准等制造要素及其关联关系显式化为可计算、可推理的图结构数据。与关系型数据库相比,知识图谱的独特优势在于既能承载人类可理解的语义关系,又能支撑机器可执行的图推理操作。
神经符号AI(Neurosymbolic AI) 是连接神经网络感知与符号逻辑推理的桥梁:神经网络负责从原始数据中提取模式和特征(感知层),符号逻辑负责基于领域知识进行推理和解释(推理层),两者协同实现"既知其然,也知其所以然"的可解释智能。
2.2 技术演进脉络
工业AI的技术演进经历了三个阶段:
|--------|-----------|----------|-----------------------|------------------|
| 阶段 | 时间 | 核心范式 | 代表技术 | 核心局限 |
| 自动化阶段 | 2010s | 规则驱动 | PLC/SCADA/专家系统 | 缺乏学习和适应能力 |
| 数字化阶段 | 2018-2023 | 数据驱动 | 深度学习/机器视觉/预测性维护 | 黑箱不可解释,数据稀疏泛化差 |
| 智能化阶段 | 2024-至今 | 知识+数据双驱动 | 物理AI/神经符号AI/知识图谱/具身智能 | 技术融合复杂度高,工程落地挑战大 |
当前正处于从"数字化"向"智能化"跃迁的关键节点。推动这一跃迁的三股技术力量是:知识图谱 (解决"数据→知识"的转化问题)、神经符号AI (解决"感知→推理"的协同问题)、物理AI(解决"数字→物理"的闭环问题)。
2.3 技术选型对比分析
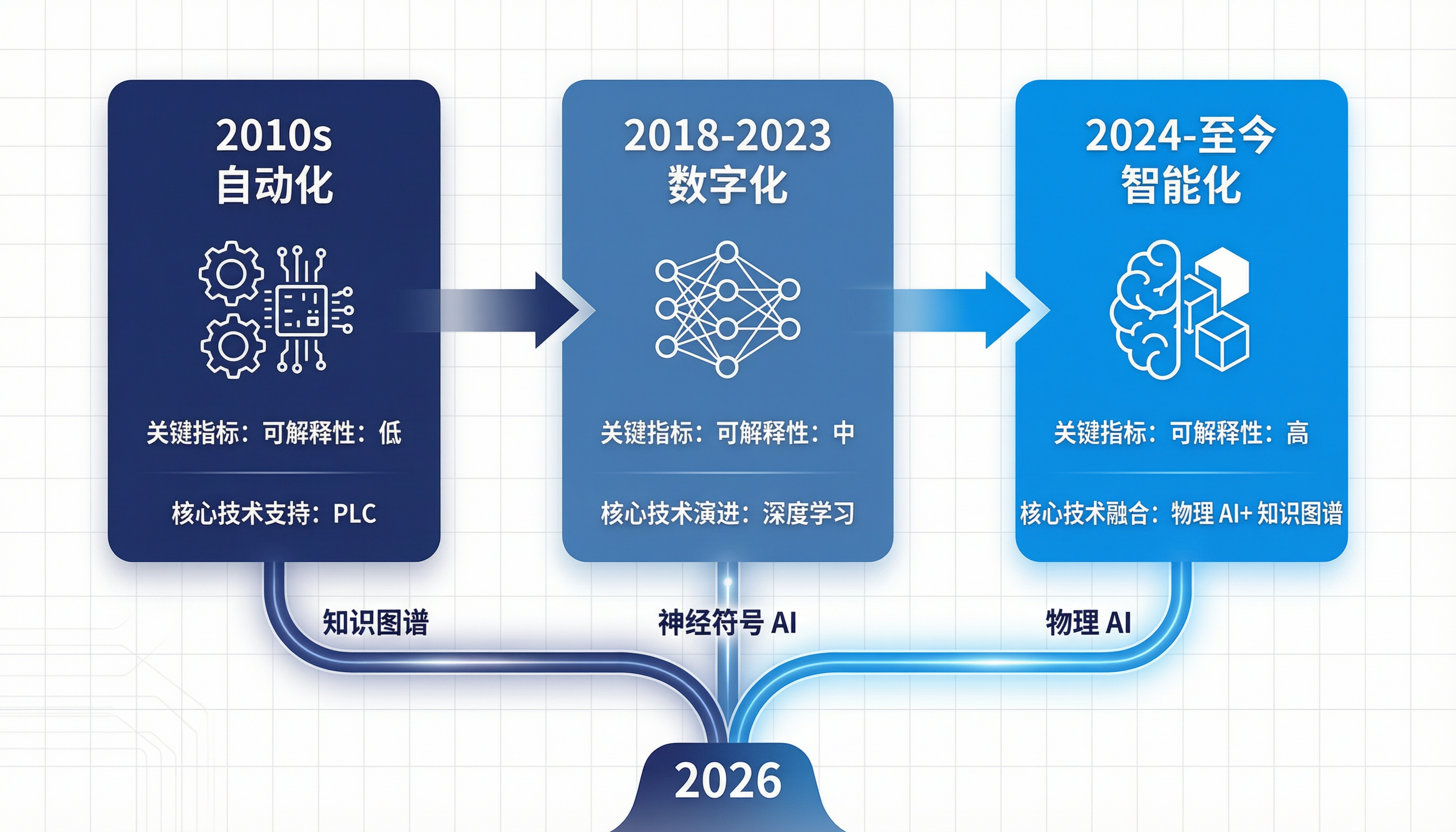
图2:技术演进路线(自动化→数字化→智能化)
|----------------------|----------|----------|----------|----------|-------------|
| 技术方案 | 可解释性 | 跨域推理 | 实时响应 | 知识更新 | 与物理世界交互 |
| 纯深度学习 | 低 | 弱 | 高 | 需重训练 | 无 |
| 专家系统 | 高 | 中 | 高 | 人工维护 | 无 |
| 静态知识图谱 | 高 | 强 | 中 | 半自动 | 无 |
| LLM+Agent | 中 | 强 | 低 | 提示工程 | 间接 |
| 物理AI+知识图谱+神经符号AI | 高 | 强 | 高 | 持续进化 | 直接闭环 |
本方案选择"物理AI+知识图谱+神经符号AI"的融合路线,基于以下选型逻辑:知识图谱提供制造领域的结构化语义基础,神经符号AI实现感知与推理的协同,物理AI框架确保系统在真实物理约束下运行------三者互补,构成完整的"感知→理解→推理→行动"智能闭环。
③ 方法论与技术架构(Methodology)
3.1 整体架构设计
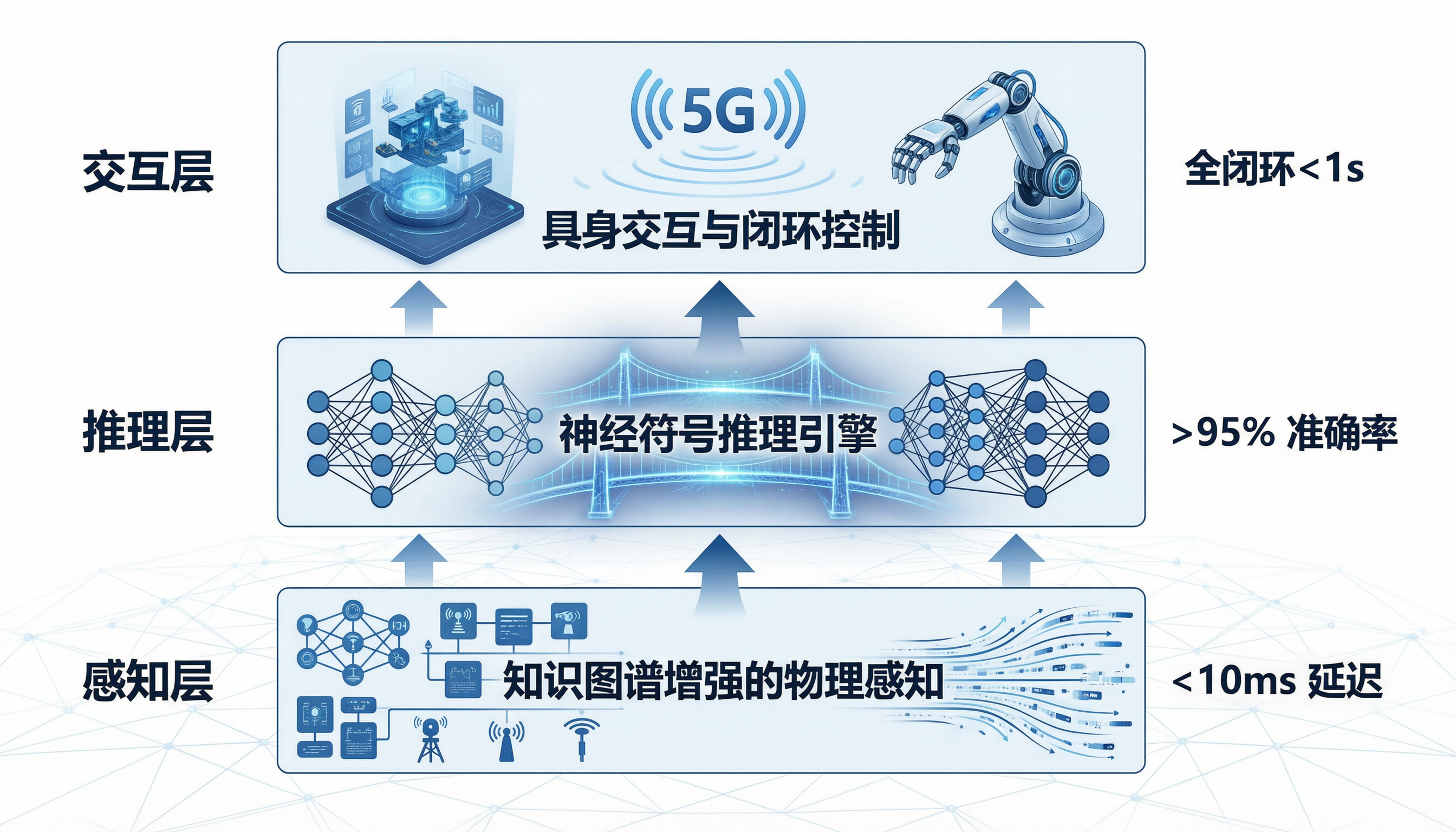
图3:KAMA三层架构(感知层→推理层→交互层)
本文提出**知识增强制造智能体(Knowledge-Augmented Manufacturing Agent, KAMA)**三层架构,从底向上依次为:
┌─────────────────────────────────────────────────────┐
│ ③ 交互层(Interaction Layer) │
│ 具身机器人 · 工业5G专网 · 数字孪生 · 闭环控制 │
├─────────────────────────────────────────────────────┤
│ ② 推理层(Reasoning Layer) │
│ 神经符号引擎 · 因果推理 · 反事实分析 · 工艺优化 │
├─────────────────────────────────────────────────────┤
│ ① 感知层(Perception Layer) │
│ 知识图谱 · 多模态融合 · 物理状态估计 · 异常检测 │
└─────────────────────────────────────────────────────┘
感知层:以知识图谱为语义底座,将来自MES/SCADA/PLC/视觉传感器的多源异构数据转化为结构化的物理状态描述。知识图谱在此不仅存储设备参数(如"主轴转速8000rpm"),更编码物理关系(如"主轴转速↑→轴承温度↑→润滑失效风险↑"),使感知从"数据采集"升级为"语义理解"。
推理层:以神经符号AI为核心引擎,神经网络负责从时序数据中识别异常模式,符号推理负责基于知识图谱中的物理约束和因果规则进行故障根因分析。两者的协同机制是:神经网络发现"振动幅值在14:32突增3.2倍"这一异常事件,符号推理沿着知识图谱中的因果链回溯,定位到"冷却液泵压力下降→刀具过热→切削力异常→振动突增"的完整因果链。
交互层:以数字孪生为虚实映射桥梁,以5G专网为通信基座,以具身机器人为物理执行终端。数字孪生模型在虚拟空间中仿真验证推理层的决策建议,确认安全可行后,通过5G专网下发指令至物理设备或机器人执行,形成"感知→推理→决策→仿真→执行→反馈"的完整闭环。
3.2 核心模块1:知识图谱增强的物理感知
制造知识图谱的构建遵循"实体识别→关系抽取→图谱构建→持续演化"的四步流程。与传统静态知识库不同,物理感知知识图谱具备三个关键特性:
-
时序感知:知识图谱中的实体状态随时间动态更新,例如"轴承-001"的"磨损程度"属性从"0.12mm"演化到"0.18mm",图谱自动记录状态变化的时间戳,支持趋势分析和退化预测
-
物理约束嵌入:将物理定律编码为图谱中的约束规则,例如"冷却液流量<5L/min → 刀具温度>200°C"这类物理因果规则,使推理层能够基于物理定律而非纯统计相关性进行判断
-
多粒度语义:从设备级(单台机床的振动频谱)到产线级(多台设备的协同状态)再到工厂级(全局能耗与产能),图谱支持不同粒度的语义查询和推理
3.3 核心模块2:神经符号推理引擎
神经符号推理引擎是KAMA架构的"决策大脑",其工作原理可概括为"神经网络感知 + 符号逻辑推理"的双通道协同:
-
神经网络通道:采用图神经网络(GNN)对知识图谱中的设备关系进行建模,GNN天然适合处理图结构数据,能够捕捉设备间的相互影响关系(如"设备A的振动异常会通过传送带传导至设备B")。同时,时序模型(LSTM/Transformer)处理传感器时序数据,识别异常模式
-
符号推理通道:基于知识图谱中的物理约束和因果规则,执行逻辑推理。当神经网络通道检测到异常后,符号推理通道沿图谱中的因果链进行多跳回溯,定位根因节点,并输出人类可读的因果解释链
双通道的协同机制是:神经网络通道提供"异常在哪"(What & Where),符号推理通道回答"为什么异常"(Why)和"该怎么做"(How)。这种协同不仅提高了诊断准确率,更关键的是提供了工程师可理解、可验证的推理过程。
3.4 双模块融合创新点
物理感知模块与神经符号推理模块的融合,构建了制造业特有的**"感知-推理闭环"**:
-
从被动监测到主动认知:传统方案是"传感器采集→阈值告警→人工排查",融合方案是"物理感知→语义理解→自动推理→根因定位",感知层将原始数据转化为语义事件,推理层直接输出因果链,将故障定位时间从小时级缩短至秒级
-
从黑箱预测到可解释诊断:传统深度学习方案给出"故障概率87%",融合方案给出"刀具磨损导致切削力增大→振动频率偏移至共振区→轴承加速退化→建议24小时内更换刀具"的完整因果链
-
从静态知识到动态演化:知识图谱不再是静态数据库,而是通过持续接收感知层的实时状态更新和推理层的反馈修正,实现制造知识的自动积累和持续进化
3.4 双模块融合创新点(续)
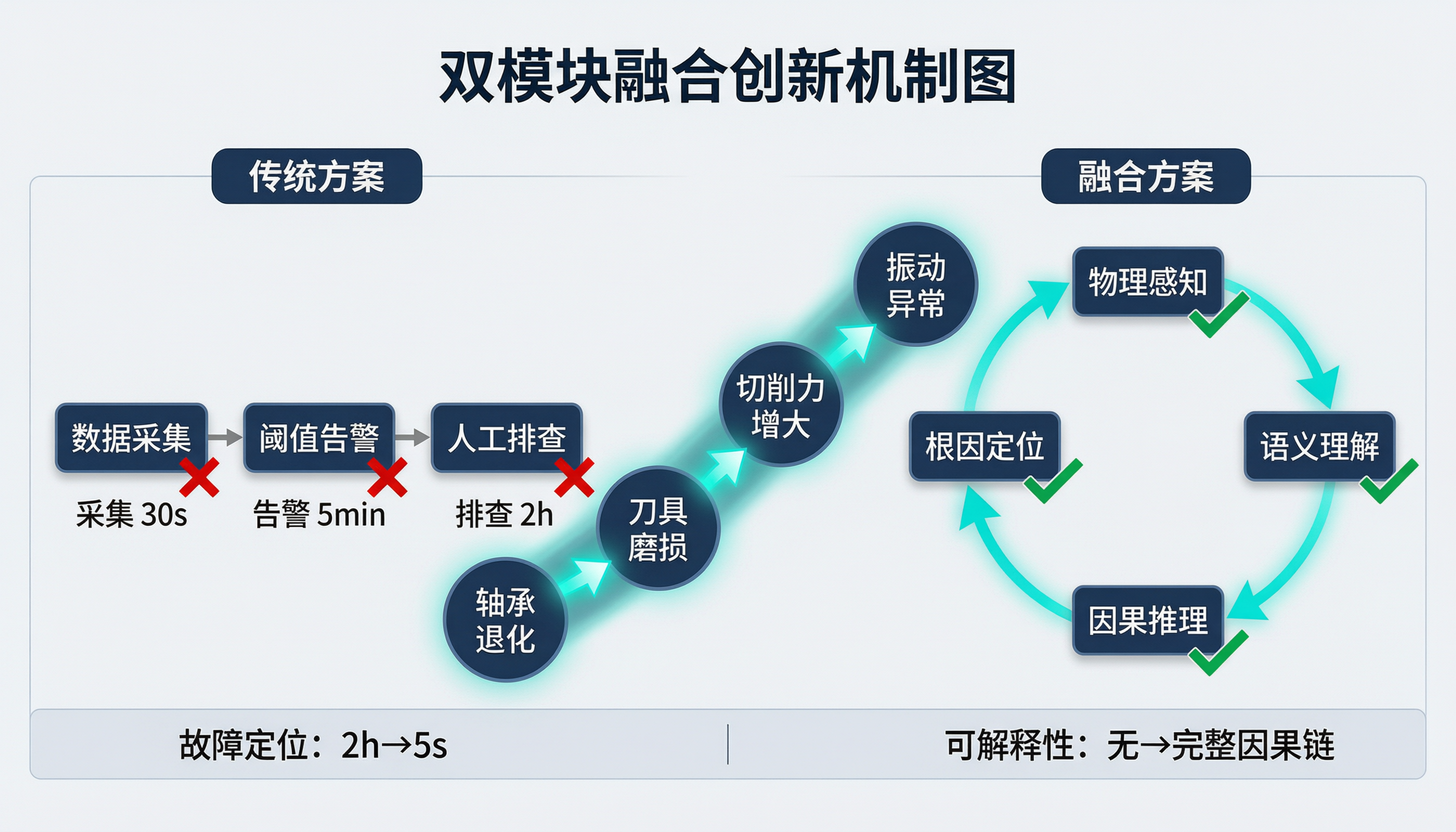
图4:双模块融合(感知-推理闭环)
④ 行业应用与验证(Application)
4.1 典型应用场景映射
KAMA架构在制造业中有三个核心应用场景,分别对应不同的价值诉求:
|-----------|------------|--------------------|----------------|
| 应用场景 | 核心能力 | 典型指标 | 产业案例方向 |
| 预测性维护 | 物理感知+因果推理 | 故障预警提前48h,定位时间<5s | 数控机床主轴/工业机器人关节 |
| 工艺优化 | 世界建模+反事实推理 | 工艺参数调优时间从3天→2h | 焊接/喷涂/注塑工艺参数优化 |
| 质量管控 | 多模态感知+根因溯源 | 缺陷根因定位准确率>90% | 汽车零部件/电子组装质量追溯 |
4.2 方案适配性分析
场景一:预测性维护
传统预测性维护依赖振动频谱的统计特征分析,对罕见故障泛化能力弱。KAMA架构的差异化优势在于:知识图谱中编码了设备零部件的物理退化模型(如轴承的Paris裂纹扩展定律),当感知层检测到异常振动时,推理层沿着物理约束链推导出退化路径,不仅预测"何时故障",更解释"为什么会故障"和"故障将如何演变"。结合工业5G专网的低延迟特性(<10ms),可实现从感知到预警的毫秒级响应。
场景二:工艺优化
工艺参数(如焊接电流、喷涂压力、注塑温度)的优化通常依赖老师傅的经验积累,调参周期长达数天。KAMA架构通过数字孪生模型在虚拟空间中仿真不同参数组合的效果,再利用神经符号推理引擎的反事实分析能力,回答"如果电流提高10%,熔深会增加多少"这类假设性问题,将工艺优化从物理试错变为虚拟仿真,显著缩短调参周期。
场景三:质量管控
制造质量问题的根因追溯往往涉及多工序、多设备的交叉影响。知识图谱将"工序A→设备B→参数C→缺陷D"的多维关联显式化为图结构,当质量异常发生时,推理引擎沿图谱中的因果链进行多跳回溯,快速定位根因节点。与传统的跨部门逐级排查相比,根因定位效率提升数十倍。
4.3 预期价值分析

图5:三大应用场景与性能提升
|-----------|----------|------------|-------------|
| 价值维度 | 传统方案 | KAMA方案 | 提升幅度 |
| 故障定位时间 | 2-4小时 | <5秒 | >1000× |
| 工艺优化周期 | 3-7天 | 2-4小时 | >10× |
| 质量根因定位准确率 | 60-70% | >90% | +30% |
| 非计划停机 | 基准 | 减少30-50% | 大幅降低 |
| 知识传承 | 依赖个人经验 | 系统化知识图谱 | 从人到系统 |
⑤ 挑战与未来方向(Discussion)
5.1 当前技术局限
物理AI在制造业的落地仍面临三个核心技术挑战。第一,Sim-to-Real Gap(仿真到现实的鸿沟) :数字孪生模型在仿真环境中的表现与真实物理世界存在偏差,物理参数(摩擦系数、热传导率等)的精确建模难度极高,导致仿真验证结果的可信度受限。第二,物理常识推理的缺失 :当前AI系统缺乏人类工程师具备的"物理常识"------例如,系统可能知道"温度升高会导致润滑失效",但无法像人类一样理解"如果冷却液泄漏到地板上,地会变滑"这类跨域物理推理。第三,知识图谱的冷启动问题:构建高质量的制造知识图谱需要大量领域专家的参与,初期投入大、周期长,中小制造企业难以承担。
5.2 行业落地挑战
从技术验证到规模化部署,物理AI在制造业面临四重落地挑战。数据层面 :工业数据的采集标准不统一,不同厂商的PLC/SCADA系统接口各异,数据治理成本高。人才层面 :同时理解物理AI技术和制造工艺的复合型人才稀缺。成本层面 :5G专网部署、边缘计算节点建设、具身机器人采购等前期投入较大,投资回报周期需精确评估。安全层面:物理AI系统直接控制物理设备,一旦推理错误可能导致设备损坏甚至人员伤亡,对系统的安全性和可靠性要求远高于纯数字AI。
5.3 未来发展方向
展望未来,物理AI赋能智能制造将沿着以下三个方向演进:
-
从单点智能到系统智能:当前应用集中在单台设备或单条产线,未来将向工厂级、供应链级、产业集群级的全局智能演进,知识图谱的规模将从万级节点扩展至亿级节点
-
从辅助决策到自主决策:随着具身机器人成本的下降和5G专网的普及,AI将从"给工程师提建议"进化为"自主执行操作",实现从感知到行动的完全闭环
-
从专用智能到通用物理智能:借鉴大语言模型的通用能力,未来的物理AI系统将具备跨场景、跨任务的迁移学习能力,一套系统可同时处理预测性维护、工艺优化、质量管控等多种任务
⑥ 结语(Conclusion)
物理AI正在重新定义制造业的智能化边界。它不再满足于在数字空间中处理数据,而是走向物理世界,去感知、去理解、去推理、去行动。本文提出的知识增强制造智能体(KAMA)架构------以知识图谱为语义底座、以神经符号AI为推理引擎、以数字孪生为交互桥梁------为物理AI在制造业的落地提供了一条可操作的技术路径。
从达沃斯论坛的议题设置到智元机器人的量产下线,从工业5G专网的试点启动到全球制造业的数字化转型,物理AI的产业窗口期已经打开。对于制造企业而言,当前的关键不是"要不要做物理AI",而是"如何找到最适合自身场景的切入点"------从预测性维护开始,逐步扩展到工艺优化和质量管控,最终构建完整的物理AI驱动智能制造体系。
物理AI时代的制造业,不再是"机器换人"的零和博弈,而是"人机协同"的共生进化------AI负责感知、推理和执行,人类负责定义目标、注入知识和做出价值判断。这不是机器取代人,而是机器放大人。