文章目录
-
- 每日一句正能量
- 一、引言:为什么功耗优化是嵌入式设计的核心?
- 二、MCU功耗组成与优化层次
-
- [2.1 功耗来源分析](#2.1 功耗来源分析)
- [2.2 优化层次模型](#2.2 优化层次模型)
- [三、ARM Cortex-M低功耗模式深度解析](#三、ARM Cortex-M低功耗模式深度解析)
-
- [3.1 低功耗模式状态机](#3.1 低功耗模式状态机)
- [3.2 低功耗模式配置代码](#3.2 低功耗模式配置代码)
- 四、时钟策略:功耗优化的核心杠杆
- 五、外设管理:从mA到μA的关键
-
- [5.1 外设功耗管理状态机](#5.1 外设功耗管理状态机)
- [5.2 GPIO低功耗配置](#5.2 GPIO低功耗配置)
- 六、唤醒策略:决定平均功耗的关键
-
- [6.1 三种唤醒策略对比](#6.1 三种唤醒策略对比)
- [6.2 DMA自主运行实现](#6.2 DMA自主运行实现)
- 七、完整低功耗系统设计流程
-
- [7.1 设计流程与检查清单](#7.1 设计流程与检查清单)
- [7.2 功耗测量与验证](#7.2 功耗测量与验证)
- 八、实际案例:从32.52mA到0.27μA的优化实践
- 九、低功耗设计检查清单
- 十、总结
每日一句正能量
打破认知的边界,你会发现,人生还有很多你不曾想象的可能。
认知边界就像鱼缸的玻璃。你以为世界只有这么小,是因为你从未游出去过。打破边界意味着:质疑你一直相信的"真理",接触不同领域、不同观念的人,尝试一件你之前觉得"不可能"的事。每打破一层边界,你的人生选项就会成倍增加。
一、引言:为什么功耗优化是嵌入式设计的核心?
在物联网(IoT)时代,数以亿计的传感器节点、可穿戴设备和远程监测终端依赖纽扣电池或能量采集器供电。一颗CR2032纽扣电池仅有约220mAh容量,若设备平均电流为1mA,续航仅约9天;而若将平均电流降至2μA,续航可延长至11年------这5000倍的差异正是超低功耗设计的价值所在。
然而,许多嵌入式开发者在面对功耗优化时往往陷入"只见树木不见森林"的困境:仅关注关闭LED、降低CPU频率等表层优化,却忽略了时钟树、外设门控、唤醒策略等系统性因素。本文将从功耗组成分析 出发,系统性地讲解从mA到μA的电流优化方法论,重点涵盖外设管理 与时钟策略两大核心维度,并提供可直接落地的代码实现。
二、MCU功耗组成与优化层次
2.1 功耗来源分析
MCU的总功耗由四个主要部分组成,理解其比例是优化的第一步:
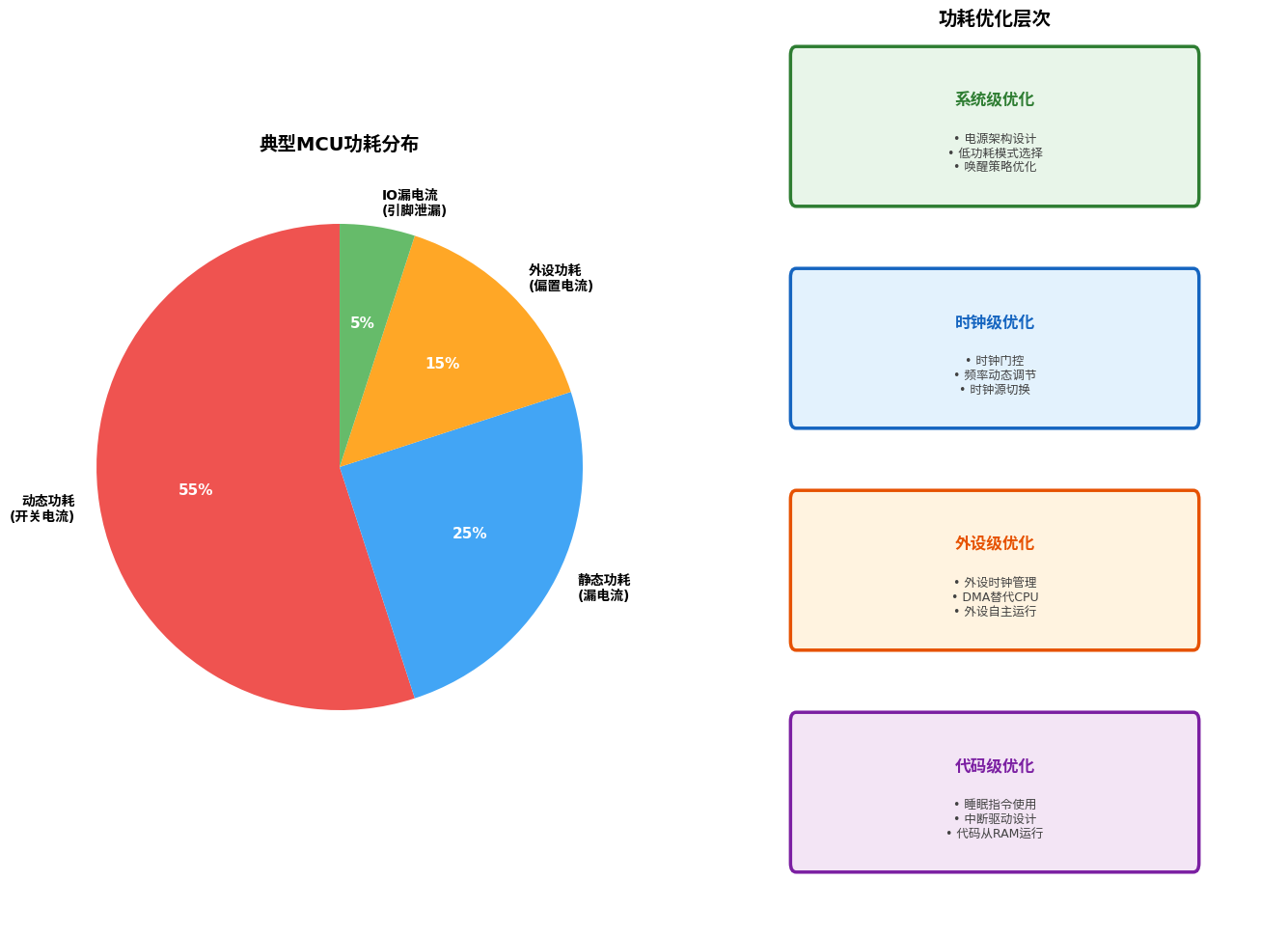
| 功耗类型 | 占比 | 来源 | 优化方向 |
|---|---|---|---|
| 动态功耗 | ~55% | CMOS开关电流 (P = CV²f) | 降低电压/频率、时钟门控 |
| 静态功耗 | ~25% | 亚阈值漏电流 | 关闭电源域、降低温度 |
| 外设功耗 | ~15% | 模拟外设偏置电流 | 外设时钟管理、低功耗模式 |
| IO漏电流 | ~5% | 引脚泄漏、上拉/下拉电阻 | GPIO配置为模拟输入 |
动态功耗遵循公式 P = C × V² × f,其中C为负载电容、V为供电电压、f为开关频率。这意味着将电压从3.3V降至1.8V,功耗可降低约70%;将频率从80MHz降至4MHz,功耗可降低95%。
2.2 优化层次模型
超低功耗设计是一个多层次、系统化的工程,需要从系统级到代码级逐层优化:
- 系统级:电源架构设计、低功耗模式选择、唤醒策略优化
- 时钟级:时钟门控、频率动态调节、时钟源切换
- 外设级:外设时钟管理、DMA替代CPU、外设自主运行
- 代码级:睡眠指令使用、中断驱动设计、代码从RAM运行
三、ARM Cortex-M低功耗模式深度解析
3.1 低功耗模式状态机
ARM Cortex-M架构定义了多种低功耗模式,从Run到Standby,电流跨度可达四个数量级:
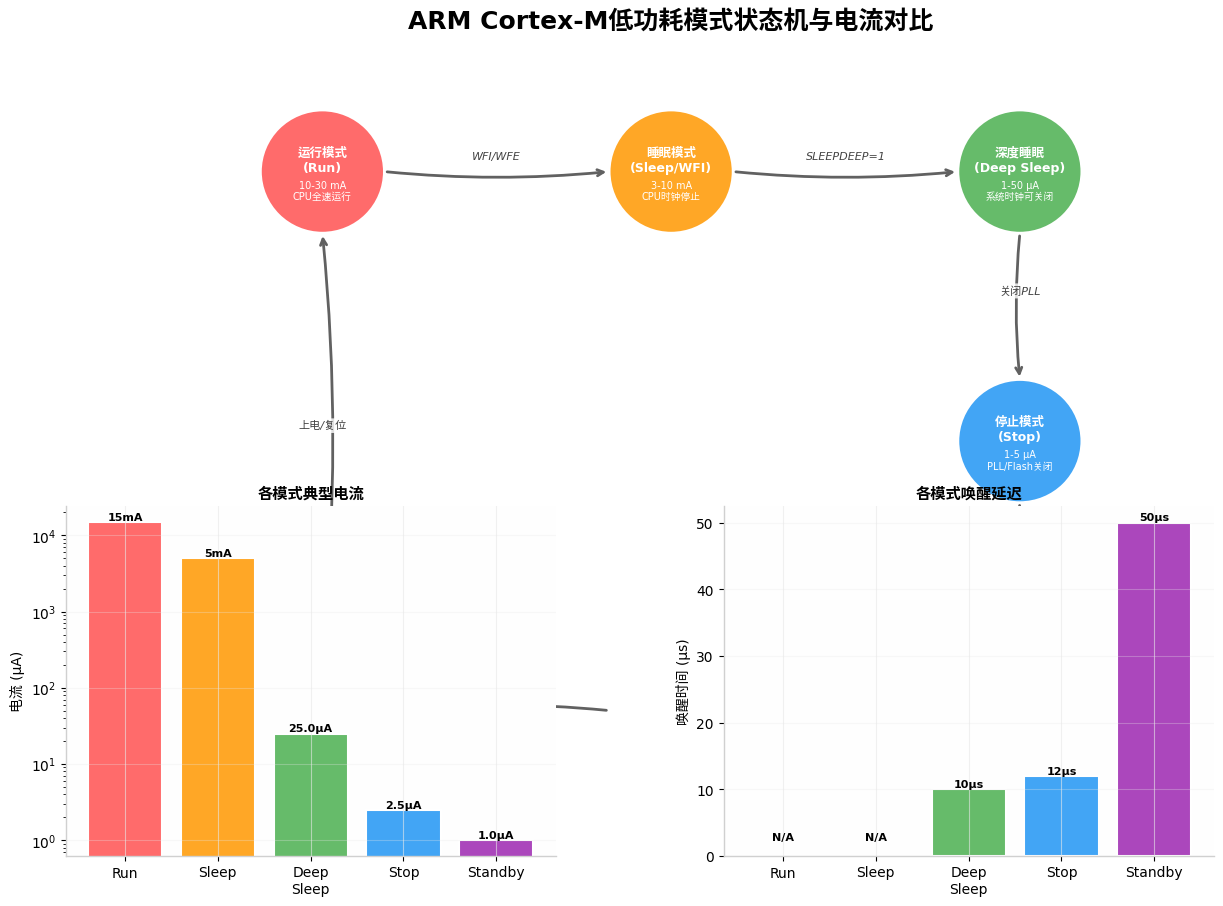
| 模式 | 典型电流 | 唤醒时间 | 特性 | 适用场景 |
|---|---|---|---|---|
| Run | 10-30mA | 0 | CPU全速运行,所有外设可用 | 数据处理、通信 |
| Sleep (WFI) | 3-10mA | 0 | CPU时钟停止,外设继续运行 | 短暂等待 |
| Deep Sleep | 1-50μA | 10μs | 系统时钟可关闭,PLL关闭 | 周期性唤醒 |
| Stop | 1-5μA | 12μs | Flash/PLL关闭,SRAM保持 | 长时间休眠 |
| Standby | 0.5-2μA | 50μs | 仅RTC/备份域,寄存器丢失 | 极端低功耗 |
关键设计原则 :设备应尽可能长时间处于Stop或Standby模式 ,仅在必要时短暂唤醒执行处理。理想状态下,设备应有99%以上的时间处于深度睡眠。
3.2 低功耗模式配置代码
c
/**
* @file low_power_modes.c
* @brief ARM Cortex-M低功耗模式完整配置
* @version 1.0
*/
#include <stm32l4xx_hal.h>
/* ========== 低功耗模式枚举 ========== */
typedef enum {
PWR_MODE_RUN, // 运行模式
PWR_MODE_SLEEP, // 睡眠模式 (WFI/WFE)
PWR_MODE_LOW_POWER_RUN, // 低功耗运行模式
PWR_MODE_STOP0, // STOP0 (保留所有唤醒源)
PWR_MODE_STOP1, // STOP1 (SRAM2可关闭)
PWR_MODE_STOP2, // STOP2 (仅保留LPRAM)
PWR_MODE_STANDBY, // 待机模式 (仅备份域)
PWR_MODE_SHUTDOWN, // 关机模式 (仅I/O唤醒)
} pwr_mode_t;
/* ========== 当前功耗模式状态 ========== */
static volatile pwr_mode_t g_current_mode = PWR_MODE_RUN;
/**
* @brief 进入睡眠模式 (Sleep Mode)
*
* CPU时钟停止,外设继续运行,任意中断即可唤醒
* 电流: 3-10mA (取决于外设)
*/
void enter_sleep_mode(void)
{
// 清除SLEEPDEEP位,确保进入Sleep而非Deep Sleep
SCB->SCR &= ~SCB_SCR_SLEEPDEEP_Msk;
// 可选:启用Sleep-On-Exit,ISR完成后自动返回睡眠
SCB->SCR |= SCB_SCR_SLEEPONEXIT_Msk;
// 执行WFI (Wait For Interrupt)
__WFI();
// 唤醒后清除Sleep-On-Exit(如需返回主循环)
SCB->SCR &= ~SCB_SCR_SLEEPONEXIT_Msk;
}
/**
* @brief 进入停止模式 (Stop Mode)
*
* 系统时钟关闭,PLL/Flash关闭,SRAM保持
* 电流: 1-5μA
* 唤醒时间: ~12μs
*/
void enter_stop_mode(pwr_mode_t stop_level)
{
// 配置电压调节器
PWR->CR1 &= ~PWR_CR1_MRUDS; // 主调节器在Stop模式下保持
// 根据Stop级别配置
switch (stop_level) {
case PWR_MODE_STOP0:
// STOP0: 所有唤醒源可用,最高功耗Stop
PWR->CR1 &= ~PWR_CR1_LPMS_Msk;
PWR->CR1 |= PWR_CR1_LPMS_STOP0;
break;
case PWR_MODE_STOP1:
// STOP1: SRAM2可关闭,节省额外功耗
PWR->CR1 &= ~PWR_CR1_LPMS_Msk;
PWR->CR1 |= PWR_CR1_LPMS_STOP1;
break;
case PWR_MODE_STOP2:
// STOP2: 仅保留LPRAM,最低功耗Stop
PWR->CR1 &= ~PWR_CR1_LPMS_Msk;
PWR->CR1 |= PWR_CR1_LPMS_STOP2;
break;
default:
return;
}
// 设置SLEEPDEEP位,确保进入Deep Sleep
SCB->SCR |= SCB_SCR_SLEEPDEEP_Msk;
// 清除Sleep-On-Exit(Stop模式通常不启用)
SCB->SCR &= ~SCB_SCR_SLEEPONEXIT_Msk;
// 保存外设状态(可选)
save_peripheral_state();
// 执行WFI
__WFI();
// 唤醒后恢复系统时钟
system_clock_restore();
// 恢复外设状态
restore_peripheral_state();
g_current_mode = PWR_MODE_RUN;
}
/**
* @brief 进入待机模式 (Standby Mode)
*
* 仅保留RTC和备份域,所有寄存器丢失
* 电流: 0.5-2μA
* 唤醒源: WKUP引脚、RTC闹钟、NRST复位
*/
void enter_standby_mode(void)
{
// 启用电源时钟
__HAL_RCC_PWR_CLK_ENABLE();
// 清除唤醒标志
PWR->SCR |= PWR_SCR_CWUF;
// 配置待机模式
PWR->CR1 &= ~PWR_CR1_LPMS_Msk;
PWR->CR1 |= PWR_CR1_LPMS_STANDBY;
// 设置SLEEPDEEP
SCB->SCR |= SCB_SCR_SLEEPDEEP_Msk;
// 执行WFI
__WFI();
// 注意:从Standby唤醒相当于复位,不会执行到这里
}
/**
* @brief 系统时钟恢复(从Stop模式唤醒后)
*/
void system_clock_restore(void)
{
// 重新启用HSE/HSI
if (__HAL_RCC_GET_FLAG(RCC_FLAG_HSERDY) == RESET) {
HAL_RCC_OscConfig(&g_osc_config);
}
// 重新配置PLL
if (__HAL_RCC_GET_SYSCLK_SOURCE() != RCC_SYSCLKSOURCE_STATUS_PLLCLK) {
HAL_RCC_ClockConfig(&g_clk_config, FLASH_LATENCY_4);
}
// 重新配置Flash延迟
__HAL_FLASH_SET_LATENCY(FLASH_LATENCY_4);
// 更新SystemCoreClock变量
SystemCoreClockUpdate();
}四、时钟策略:功耗优化的核心杠杆
4.1 时钟树架构与门控策略
时钟系统是MCU功耗的"总阀门"------所有动态功耗都与时钟直接相关。以STM32L4为例,其时钟树架构如下:
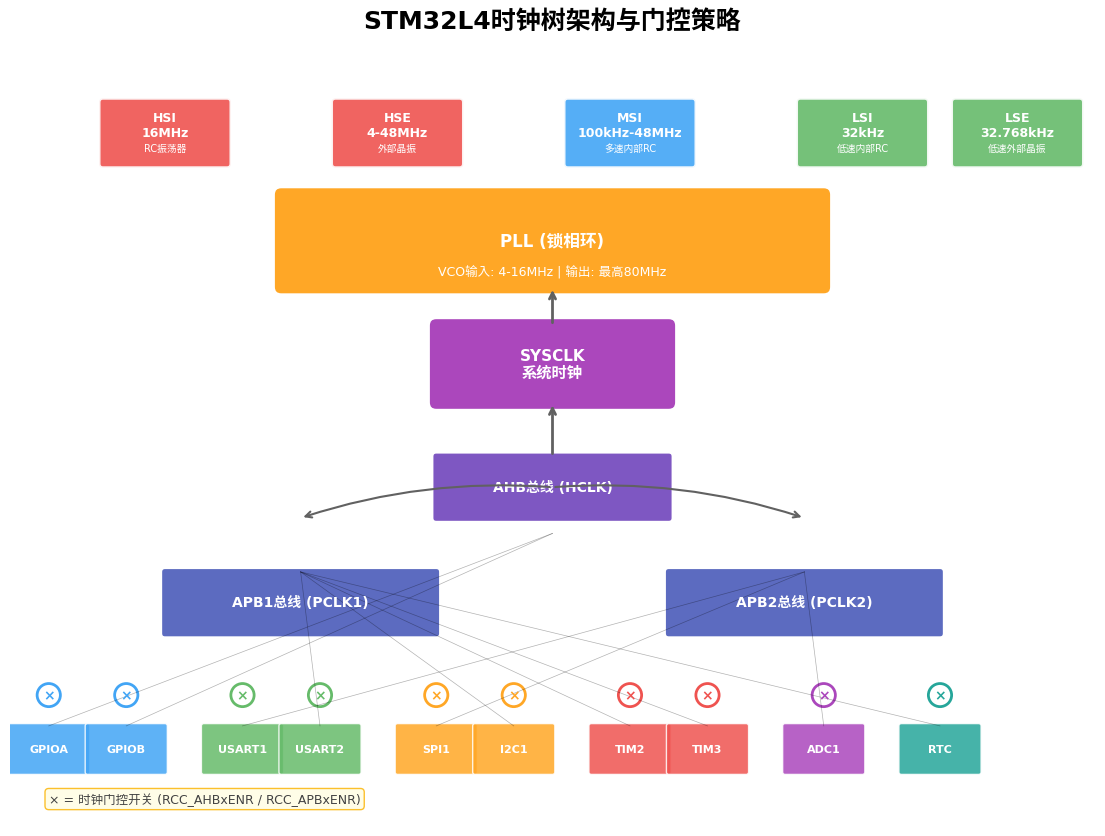
时钟源选择策略
| 时钟源 | 频率范围 | 精度 | 功耗 | 适用场景 |
|---|---|---|---|---|
| HSI | 16MHz | ±1% | 中等 | 快速启动、临时运行 |
| HSE | 4-48MHz | ±20ppm | 较高 | 高精度通信、USB |
| MSI | 100kHz-48MHz | ±0.25% | 低 | 动态频率调节 |
| LSI | 32kHz | ±5% | 极低 | RTC、看门狗 |
| LSE | 32.768kHz | ±20ppm | 极低 | 高精度RTC |
关键优化原则:使用**MSI(Multi-Speed Internal)**作为系统时钟源,它可在100kHz到48MHz之间动态调节,无需PLL即可提供多种频率,且功耗远低于HSE+PLL方案。
时钟门控实现
c
/**
* @file clock_gating.c
* @brief 时钟门控与外设时钟管理
*/
#include <stm32l4xx_hal.h>
/* ========== 外设时钟门控管理器 ========== */
typedef struct {
uint32_t ahb1_enr; // AHB1外设时钟使能寄存器备份
uint32_t ahb2_enr; // AHB2外设时钟使能寄存器备份
uint32_t ahb3_enr; // AHB3外设时钟使能寄存器备份
uint32_t apb1enr1; // APB1外设时钟使能寄存器1备份
uint32_t apb1enr2; // APB1外设时钟使能寄存器2备份
uint32_t apb2enr; // APB2外设时钟使能寄存器备份
} clock_gating_state_t;
static clock_gating_state_t g_clock_state;
/**
* @brief 保存当前外设时钟状态
*/
void clock_gating_save_state(void)
{
g_clock_state.ahb1_enr = RCC->AHB1ENR;
g_clock_state.ahb2_enr = RCC->AHB2ENR;
g_clock_state.ahb3_enr = RCC->AHB3ENR;
g_clock_state.apb1enr1 = RCC->APB1ENR1;
g_clock_state.apb1enr2 = RCC->APB1ENR2;
g_clock_state.apb2enr = RCC->APB2ENR;
}
/**
* @brief 恢复外设时钟状态
*/
void clock_gating_restore_state(void)
{
RCC->AHB1ENR = g_clock_state.ahb1_enr;
RCC->AHB2ENR = g_clock_state.ahb2_enr;
RCC->AHB3ENR = g_clock_state.ahb3_enr;
RCC->APB1ENR1 = g_clock_state.apb1enr1;
RCC->APB1ENR2 = g_clock_state.apb1enr2;
RCC->APB2ENR = g_clock_state.apb2enr;
// 确保时钟稳定
__DSB();
__ISB();
}
/**
* @brief 禁用所有非必要外设时钟
*
* 保留: GPIOA (调试)、PWR、RTC、LPTIM1
* 禁用: 其他所有外设
*/
void clock_gating_disable_all(void)
{
// 保存当前状态
clock_gating_save_state();
// 仅保留必要外设时钟
RCC->AHB1ENR = RCC_AHB1ENR_DMA1EN; // 保留DMA1(如需要)
RCC->AHB2ENR = RCC_AHB2ENR_GPIOAEN; // 保留GPIOA
RCC->APB1ENR1 = RCC_APB1ENR1_PWREN | // 保留PWR
RCC_APB1ENR1_RTCAPBEN; // 保留RTC接口
RCC->APB1ENR2 = RCC_APB1ENR2_LPTIM1EN; // 保留LPTIM1
RCC->APB2ENR = 0; // 关闭所有APB2外设
__DSB();
__ISB();
}
/**
* @brief 动态频率调节 (DVFS)
*
* 根据任务负载动态调整系统频率
*/
void dvfs_set_frequency(uint32_t target_freq_mhz)
{
// 确保在Run模式下
if (g_current_mode != PWR_MODE_RUN) {
return;
}
// 选择最接近的MSI频率
uint32_t msi_range;
if (target_freq_mhz >= 48) {
msi_range = RCC_MSIRANGE_11; // 48MHz
} else if (target_freq_mhz >= 24) {
msi_range = RCC_MSIRANGE_10; // 24MHz
} else if (target_freq_mhz >= 16) {
msi_range = RCC_MSIRANGE_9; // 16MHz
} else if (target_freq_mhz >= 8) {
msi_range = RCC_MSIRANGE_8; // 8MHz
} else if (target_freq_mhz >= 4) {
msi_range = RCC_MSIRANGE_7; // 4MHz
} else if (target_freq_mhz >= 2) {
msi_range = RCC_MSIRANGE_6; // 2MHz
} else if (target_freq_mhz >= 1) {
msi_range = RCC_MSIRANGE_5; // 1MHz
} else {
msi_range = RCC_MSIRANGE_4; // 400kHz
}
// 切换时钟源到MSI
__HAL_RCC_MSI_RANGE_CONFIG(msi_range);
__HAL_RCC_SYSCLK_CONFIG(RCC_SYSCLKSOURCE_MSI);
// 关闭PLL以节省功耗
__HAL_RCC_PLL_DISABLE();
// 更新系统时钟变量
SystemCoreClockUpdate();
printf("[DVFS] 频率切换至 %lu MHz\n", SystemCoreClock / 1000000);
}五、外设管理:从mA到μA的关键
5.1 外设功耗管理状态机
每个外设都有完整的功耗生命周期,从Power On到Power Off,电流差异可达数百倍:
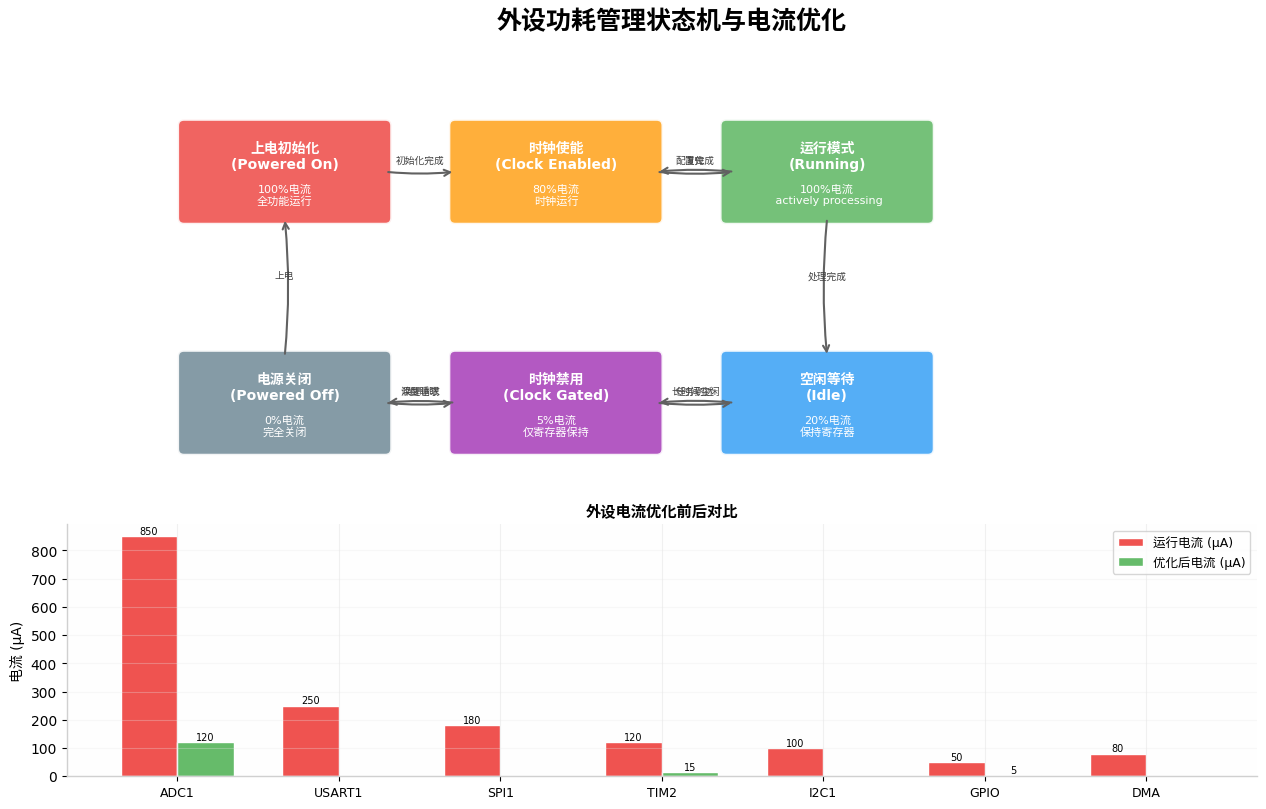
外设状态转换策略:
- Power On → Clock Enabled:初始化完成后立即关闭不需要的外设时钟
- Clock Enabled → Running:仅在需要时使能外设,用完立即禁用
- Running → Idle:外设完成工作后进入低功耗模式(如ADC的Power Down模式)
- Idle → Clock Gated:长时间空闲时关闭时钟
- Clock Gated → Powered Off:深度睡眠时关闭外设电源域
c
/**
* @file peripheral_power_mgmt.c
* @brief 外设功耗管理完整实现
*/
#include <stm32l4xx_hal.h>
/* ========== 外设功耗管理器 ========== */
typedef struct {
void (*init)(void);
void (*deinit)(void);
void (*enable_clock)(void);
void (*disable_clock)(void);
void (*enter_low_power)(void);
void (*exit_low_power)(void);
uint32_t run_current_ua; // 运行电流 (μA)
uint32_t sleep_current_ua; // 睡眠电流 (μA)
bool is_initialized;
bool is_clock_enabled;
} peripheral_manager_t;
/* ========== ADC功耗管理 ========== */
static void adc_init(void)
{
hadc1.Instance = ADC1;
hadc1.Init.ClockPrescaler = ADC_CLOCK_ASYNC_DIV1;
hadc1.Init.Resolution = ADC_RESOLUTION_12B;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.NbrOfConversion = 1;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc1.Init.DMAContinuousRequests = DISABLE;
HAL_ADC_Init(&hadc1);
// 配置低功耗模式
HAL_ADCEx_Calibration_Start(&hadc1, ADC_SINGLE_ENDED);
}
static void adc_enter_low_power(void)
{
// 停止ADC转换
HAL_ADC_Stop(&hadc1);
// 禁用ADC电压调节器(进入Deep Power Down模式)
CLEAR_BIT(ADC1->CR, ADC_CR_ADVREGEN);
// 禁用ADC时钟
__HAL_RCC_ADC_CLK_DISABLE();
}
static void adc_exit_low_power(void)
{
// 重新启用ADC时钟
__HAL_RCC_ADC_CLK_ENABLE();
// 启用ADC电压调节器
SET_BIT(ADC1->CR, ADC_CR_ADVREGEN);
// 等待调节器稳定
uint32_t timeout = 100;
while ((ADC1->CR & ADC_CR_ADVREGEN) == 0) {
if (--timeout == 0) break;
}
// 重新校准
HAL_ADCEx_Calibration_Start(&hadc1, ADC_SINGLE_ENDED);
}
static peripheral_manager_t g_adc_mgr = {
.init = adc_init,
.deinit = NULL,
.enable_clock = NULL,
.disable_clock = NULL,
.enter_low_power = adc_enter_low_power,
.exit_low_power = adc_exit_low_power,
.run_current_ua = 850, // 运行电流
.sleep_current_ua = 120, // 低功耗模式电流
.is_initialized = false,
.is_clock_enabled = false,
};
/* ========== UART功耗管理 ========== */
static void uart_enter_low_power(void)
{
// 等待发送完成
while (__HAL_UART_GET_FLAG(&huart1, UART_FLAG_TC) == RESET);
// 禁用UART
__HAL_UART_DISABLE(&huart1);
// 禁用UART时钟
__HAL_RCC_USART1_CLK_DISABLE();
}
static void uart_exit_low_power(void)
{
// 启用UART时钟
__HAL_RCC_USART1_CLK_ENABLE();
// 启用UART
__HAL_UART_ENABLE(&huart1);
}
static peripheral_manager_t g_uart_mgr = {
.run_current_ua = 250,
.sleep_current_ua = 0, // 时钟关闭后无电流
.enter_low_power = uart_enter_low_power,
.exit_low_power = uart_exit_low_power,
};
/* ========== 外设管理器通用接口 ========== */
/**
* @brief 初始化所有外设
*/
void peripheral_init_all(void)
{
// 按需初始化,非全部一次性初始化
g_adc_mgr.init();
g_adc_mgr.is_initialized = true;
// UART延迟初始化(仅在需要通信时)
// g_uart_mgr.init();
}
/**
* @brief 进入低功耗前关闭所有外设
*/
void peripheral_shutdown_all(void)
{
if (g_adc_mgr.is_initialized) {
g_adc_mgr.enter_low_power();
}
if (g_uart_mgr.is_initialized) {
g_uart_mgr.enter_low_power();
}
// 关闭所有GPIO时钟(保留必要的唤醒引脚)
__HAL_RCC_GPIOB_CLK_DISABLE();
__HAL_RCC_GPIOC_CLK_DISABLE();
__HAL_RCC_GPIOD_CLK_DISABLE();
__HAL_RCC_GPIOE_CLK_DISABLE();
__HAL_RCC_GPIOH_CLK_DISABLE();
}
/**
* @brief 从低功耗唤醒后恢复外设
*/
void peripheral_restore_all(void)
{
if (g_adc_mgr.is_initialized) {
g_adc_mgr.exit_low_power();
}
if (g_uart_mgr.is_initialized) {
g_uart_mgr.exit_low_power();
}
}5.2 GPIO低功耗配置
GPIO是经常被忽视的功耗来源------未正确配置的引脚可能产生数十μA的漏电流:
c
/**
* @brief GPIO低功耗配置
*
* 原则:
* 1. 未使用引脚配置为模拟输入(无上拉/下拉)
* 2. 输出引脚驱动低电平(避免中间电平)
* 3. 输入引脚启用内部上拉/下拉(避免悬空)
* 4. 调试引脚(SWD)在量产时禁用
*/
void gpio_low_power_config(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
// 启用所有GPIO时钟(用于配置)
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_GPIOH_CLK_ENABLE();
// 配置所有未使用引脚为模拟输入
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Pin = GPIO_PIN_All;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
HAL_GPIO_Init(GPIOH, &GPIO_InitStruct);
// 保留必要的唤醒引脚配置
// 例如:WKUP引脚配置为外部中断
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
GPIO_InitStruct.Pin = WAKEUP_PIN;
HAL_GPIO_Init(WAKEUP_GPIO_PORT, &GPIO_InitStruct);
// 禁用SWD调试引脚(量产时)
// __HAL_AFIO_REMAP_SWJ_DISABLE();
// 关闭GPIO时钟(保留必要端口的时钟)
__HAL_RCC_GPIOB_CLK_DISABLE();
__HAL_RCC_GPIOC_CLK_DISABLE();
__HAL_RCC_GPIOD_CLK_DISABLE();
__HAL_RCC_GPIOE_CLK_DISABLE();
__HAL_RCC_GPIOH_CLK_DISABLE();
}六、唤醒策略:决定平均功耗的关键
6.1 三种唤醒策略对比
唤醒策略直接决定了系统的平均功耗------即使单次唤醒处理很快,若唤醒频率过高,平均电流仍然很大:
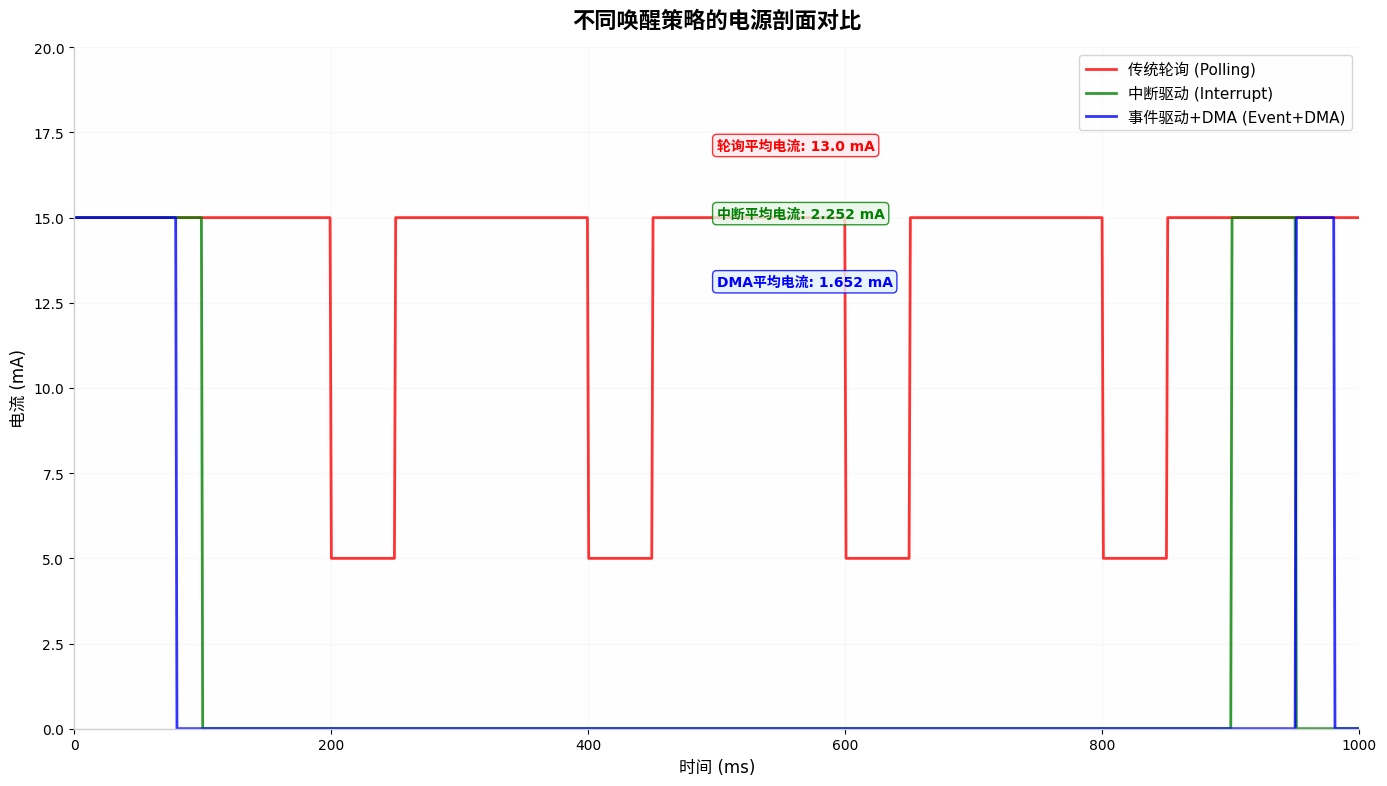
| 策略 | 平均电流 | 优点 | 缺点 |
|---|---|---|---|
| 传统轮询 | ~13mA | 实现简单 | CPU持续运行,功耗极高 |
| 中断驱动 | ~2.3mA | 响应及时,功耗较低 | 每次中断唤醒CPU |
| 事件驱动+DMA | ~1.7mA | 功耗最低,CPU休眠时间最长 | 实现复杂,需要硬件支持 |
关键洞察 :使用DMA让外设自主完成数据采集,仅在数据就绪时才唤醒CPU,可将CPU运行时间从数百ms缩短至数ms。
6.2 DMA自主运行实现
c
/**
* @file dma_autonomous.c
* @brief DMA自主运行------CPU深度睡眠时外设自动工作
*/
#include <stm32l4xx_hal.h>
#define ADC_BUFFER_SIZE 256
static uint16_t g_adc_buffer[ADC_BUFFER_SIZE];
static volatile bool g_adc_conversion_complete = false;
/**
* @brief 配置ADC + DMA自主采集
*
* CPU进入Stop模式后,DMA自动将ADC数据搬运到SRAM
* 转换完成后DMA中断唤醒CPU
*/
void adc_dma_autonomous_init(void)
{
// 启用时钟
__HAL_RCC_DMA1_CLK_ENABLE();
__HAL_RCC_ADC_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
// 配置ADC引脚
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG_ADC_CONTROL;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// 配置DMA
hdma_adc.Instance = DMA1_Channel1;
hdma_adc.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_adc.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_adc.Init.MemInc = DMA_MINC_ENABLE;
hdma_adc.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;
hdma_adc.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;
hdma_adc.Init.Mode = DMA_CIRCULAR; // 循环模式,持续采集
hdma_adc.Init.Priority = DMA_PRIORITY_LOW;
HAL_DMA_Init(&hdma_adc);
__HAL_LINKDMA(&hadc1, DMA_Handle, hdma_adc);
// 配置ADC
hadc1.Instance = ADC1;
hadc1.Init.ClockPrescaler = ADC_CLOCK_ASYNC_DIV1;
hadc1.Init.Resolution = ADC_RESOLUTION_12B;
hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;
hadc1.Init.ContinuousConvMode = ENABLE; // 连续转换模式
hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc1.Init.DMAContinuousRequests = ENABLE;
HAL_ADC_Init(&hadc1);
// 配置ADC通道
ADC_ChannelConfTypeDef sConfig = {0};
sConfig.Channel = ADC_CHANNEL_0;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_640CYCLES_5; // 长采样时间,降低功耗
sConfig.SingleDiff = ADC_SINGLE_ENDED;
HAL_ADC_ConfigChannel(&hadc1, &sConfig);
// 配置DMA中断(半传输和传输完成)
HAL_NVIC_SetPriority(DMA1_Channel1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel1_IRQn);
}
/**
* @brief 启动自主采集并进入低功耗
*/
void adc_dma_autonomous_start(void)
{
// 启动ADC DMA传输
HAL_ADC_Start_DMA(&hadc1, (uint32_t*)g_adc_buffer, ADC_BUFFER_SIZE);
// CPU进入Stop模式,DMA继续工作
printf("[DMA] CPU进入Stop模式,DMA自主采集中...\\n");
enter_stop_mode(PWR_MODE_STOP2);
// 被DMA中断唤醒后
printf("[DMA] CPU被唤醒,处理数据\\n");
process_adc_data(g_adc_buffer, ADC_BUFFER_SIZE);
// 清除标志,准备下一次
g_adc_conversion_complete = false;
}
/**
* @brief DMA中断处理
*/
void DMA1_Channel1_IRQHandler(void)
{
if (__HAL_DMA_GET_FLAG(&hdma_adc, DMA_FLAG_HT1)) {
// 半传输完成
__HAL_DMA_CLEAR_FLAG(&hdma_adc, DMA_FLAG_HT1);
// 可处理前半缓冲区
}
if (__HAL_DMA_GET_FLAG(&hdma_adc, DMA_FLAG_TC1)) {
// 传输完成
__HAL_DMA_CLEAR_FLAG(&hdma_adc, DMA_FLAG_TC1);
g_adc_conversion_complete = true;
// 唤醒CPU
}
HAL_DMA_IRQHandler(&hdma_adc);
}
/**
* @brief LPTIM定时唤醒(周期性任务)
*
* 使用LPTIM(低功耗定时器)从Stop模式周期性唤醒
* LPTIM可由LSI/LSE驱动,在Stop模式下继续运行
*/
void lptim_periodic_wakeup_init(uint32_t period_ms)
{
// 启用LPTIM1时钟
__HAL_RCC_LPTIM1_CLK_ENABLE();
// 配置LPTIM
hlptim1.Instance = LPTIM1;
hlptim1.Init.Clock.Source = LPTIM_CLOCKSOURCE_APBCLOCK_LPOSC;
hlptim1.Init.Clock.Prescaler = LPTIM_PRESCALER_DIV32; // 32kHz / 32 = 1kHz
hlptim1.Init.Trigger.Source = LPTIM_TRIGSOURCE_SOFTWARE;
hlptim1.Init.OutputPolarity = LPTIM_OUTPUTPOLARITY_HIGH;
hlptim1.Init.UpdateMode = LPTIM_UPDATE_IMMEDIATE;
hlptim1.Init.CounterSource = LPTIM_COUNTERSOURCE_INTERNAL;
HAL_LPTIM_Init(&hlptim1);
// 配置中断
HAL_NVIC_SetPriority(LPTIM1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(LPTIM1_IRQn);
// 设置周期(1kHz计数器)
uint32_t period_ticks = period_ms; // 1ms per tick
HAL_LPTIM_TimeOut_Start_IT(&hlptim1, period_ticks, period_ticks);
}
void LPTIM1_IRQHandler(void)
{
HAL_LPTIM_IRQHandler(&hlptim1);
}
void HAL_LPTIM_AutoReloadMatchCallback(LPTIM_HandleTypeDef *hlptim)
{
// LPTIM周期匹配中断
// 从Stop模式唤醒后执行周期性任务
g_periodic_wakeup_flag = true;
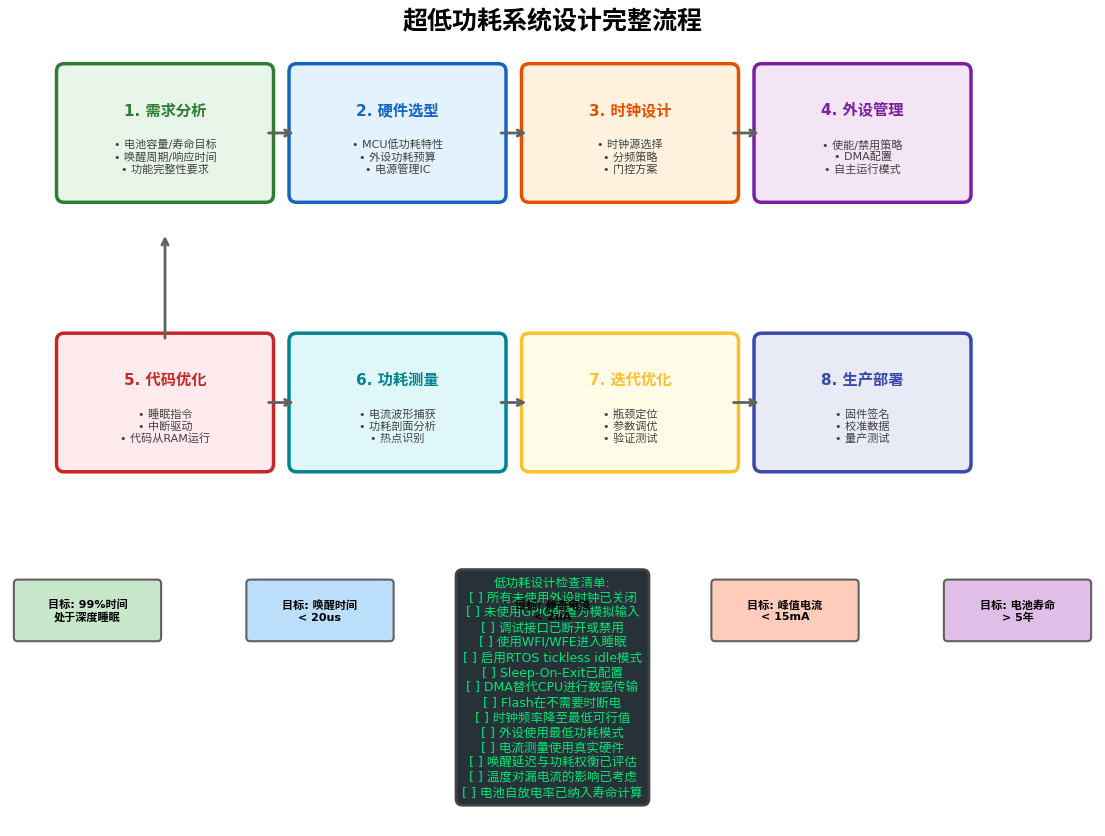
}七、完整低功耗系统设计流程
7.1 设计流程与检查清单
超低功耗设计是一个迭代过程,需要系统化地进行:
7.2 功耗测量与验证
c
/**
* @file power_measurement.c
* @brief 功耗测量与剖面分析
*/
#include <stm32l4xx_hal.h>
/* ========== 功耗测量接口 ========== */
// 使用MCU内部ADC测量Vbat(如支持)\n// 或使用外部电流检测电阻 + 运放
#define CURRENT_SENSE_RESISTOR_OHM 10.0f // 10Ω检测电阻
#define ADC_VREF_MV 3300 // 3.3V参考电压
#define ADC_RESOLUTION 4096 // 12位ADC
/**
* @brief 测量当前电流消耗
*/
float measure_current_ua(void)
{
// 启动ADC测量检测电阻压降
HAL_ADC_Start(&hadc1);
HAL_ADC_PollForConversion(&hadc1, 100);
uint32_t adc_value = HAL_ADC_GetValue(&hadc1);
HAL_ADC_Stop(&hadc1);
// 计算电压 (mV)\n float voltage_mv = (adc_value * ADC_VREF_MV) / ADC_RESOLUTION;
// 计算电流 (μA): I = V / R\n float current_ua = (voltage_mv / CURRENT_SENSE_RESISTOR_OHM) * 1000.0f;
return current_ua;
}
/**
* @brief 功耗剖面记录
*/
typedef struct {\n uint32_t timestamp_ms;\n pwr_mode_t mode;\n float current_ua;\n uint32_t wakeup_count;\n} power_profile_entry_t;\n#define POWER_PROFILE_SIZE 100\nstatic power_profile_entry_t g_power_profile[POWER_PROFILE_SIZE];\nstatic uint32_t g_profile_index = 0;\nvoid power_profile_record(pwr_mode_t mode)\n{\n if (g_profile_index >= POWER_PROFILE_SIZE) return;
g_power_profile[g_profile_index].timestamp_ms = HAL_GetTick();
g_power_profile[g_profile_index].mode = mode;
g_power_profile[g_profile_index].current_ua = measure_current_ua();\n g_power_profile[g_profile_index].wakeup_count = g_wakeup_counter;
g_profile_index++;
}
/**
* @brief 输出功耗剖面报告
*/
void power_profile_report(void)
{
printf(\"\\n========== 功耗剖面报告 ==========\\n\");
printf(\"时间(ms) | 模式 | 电流(μA) | 唤醒次数\\n\");
printf(\"------------------------------------------\\n\");
for (uint32_t i = 0; i < g_profile_index; i++) {
const char* mode_str =
g_power_profile[i].mode == PWR_MODE_RUN ? \"RUN\" :
g_power_profile[i].mode == PWR_MODE_SLEEP ? \"SLEEP\" :
g_power_profile[i].mode == PWR_MODE_STOP2 ? \"STOP2\" : \"STBY\";
printf(\"%8lu | %5s | %8.1f | %8lu\\n\",
g_power_profile[i].timestamp_ms,
mode_str,
g_power_profile[i].current_ua,
g_power_profile[i].wakeup_count);
}
// 计算平均电流
float total_current = 0;
for (uint32_t i = 0; i < g_profile_index; i++) {
total_current += g_power_profile[i].current_ua;
}
float avg_current = total_current / g_profile_index;
printf(\"\\n平均电流: %.2f μA\\n\", avg_current);
// 估算电池寿命 (CR2032, 220mAh)
float battery_life_days = (220000.0f / avg_current) / 24.0f;
printf(\"预估电池寿命 (CR2032): %.1f 天 (%.1f 年)\\n\",
battery_life_days, battery_life_days / 365.0f);
printf(\"====================================\\n\");
}八、实际案例:从32.52mA到0.27μA的优化实践
以HC32L130(Cortex-M0+)为例,展示完整的优化过程:
| 优化阶段 | 操作 | 电流 | 降幅 |
|---|---|---|---|
| 初始状态 | 全速运行,所有外设开启 | 32.52mA | - |
| 阶段1 | 关闭未使用外设时钟 | 8.5mA | -74% |
| 阶段2 | 切换至低功耗运行模式(4MHz) | 2.1mA | -94% |
| 阶段3 | 启用Sleep模式(WFI) | 520μA | -98% |
| 阶段4 | 进入Stop模式,保留RTC | 12μA | -99.96% |
| 阶段5 | 优化GPIO配置,关闭调试接口 | 2.8μA | -99.99% |
| 阶段6 | 进入Standby模式 | 0.27μA | -99.999% |
关键优化点:
- 采用双时钟策略:主系统48MHz用于高性能任务,待机时切换至32.768kHz LSE
- 事件驱动架构:RTC定时唤醒,非轮询
- 外设精细化管控:ADC启用低功耗模式(ADLPC=1),电流从532μA降至120μA
- GPIO全配置为模拟输入:消除引脚漏电流
九、低功耗设计检查清单
在将产品投入量产前,请逐项确认:
- 所有未使用外设时钟已关闭
- 未使用GPIO配置为模拟输入(无上拉/下拉)
- 调试接口(SWD/JTAG)已断开或禁用
- 使用WFI/WFE进入睡眠(非忙等待循环)
- 启用RTOS tickless idle模式
- Sleep-On-Exit已配置(中断驱动设计)
- DMA替代CPU进行数据传输
- Flash在不需要时断电(代码从RAM运行)
- 时钟频率降至最低可行值
- 外设使用最低功耗模式(如ADC的Power Down)
- 电流测量使用真实硬件(非仿真)
- 唤醒延迟与功耗权衡已评估
- 温度对漏电流的影响已考虑
- 电池自放电率已纳入寿命计算
十、总结
超低功耗设计不是单一技术的应用,而是系统化的工程方法论。从本文的分析可以看出:
| 优化维度 | 核心策略 | 典型效果 |
|---|---|---|
| 时钟管理 | MSI动态调节 + 时钟门控 | 降低动态功耗60-90% |
| 外设管理 | 状态机 + DMA自主运行 | 降低外设功耗80-95% |
| 睡眠策略 | Stop/Standby + 事件唤醒 | 静态功耗降至μA级 |
| GPIO配置 | 模拟输入 + 消除悬空 | 消除漏电流源 |
| 代码优化 | WFI + Sleep-On-Exit | 减少无效唤醒 |
最终目标是让设备99%的时间处于深度睡眠,仅在必要时以最高效率完成工作,然后立即返回睡眠。掌握这套从mA到μA的优化方法论,你的嵌入式设备将能够实现数年甚至数十年的电池续航。
转载自:https://blog.csdn.net/u014727709/article/details/162554449
欢迎 👍点赞✍评论⭐收藏,欢迎指正