目录
说明
本篇博客主要介绍CGAL库中使用Region_Growing算法检测平面的算法原理、代码以及最后展示结果。其中,代码部分在CGAL官方库中提供了例子。我在其中做了一些修改,使其可以读取PLY类型的点云文件,并在检测到平面后,为属于同一个平面的点赋予相同的颜色。最后再保存为PLY文件以方便我们查看检测结果。
在CGAL中,Region_Growing算法不仅可以用来检测平面,还可以检测圆、直线、圆锥等基本的几何。除此之外,用户也可以自定义模型并使用算法检测。
环境
- Win10/Win11
- VS2022
- CGAL 5.6.1
上述环境仅为运行此代码时的电脑环境。
一、算法原理
Region_Growing算法应用"贪心"的思想,利用种子点与邻居点的曲率差异来筛选点。在平面检测时,除了利用曲率差异,还会使用当前拟合平面与当前点的距离作为评判标准。具体看算法流程。
算法流程
- 选取种子点,若不指定种子点,则按索引顺序选取。
- 使用种子点创建平面,平面法向量为该种子点法线
- 搜索种子点(包含点)的邻居,可以按球形范围搜索,也可以按邻居个数搜索。
- 计算邻居点法线与平面法线角度差异,计算邻居点到平面距离
- 将满足条件的邻居点加入平面,更新平面法向量。
- 在包含点中重复3-5。
- 如果区域内点数不再增加,并且还有未分类的点,则在未分类点中重新选取种子点。
参数
- search_sphere_radius - 球形邻域搜索半径
- max_distance_to_plane - 当前点到拟合平面的最大距离
- max_accepted_angle - 当前点与拟合平面的角度阈值
- min_region_size - 形成一个平面的最小点数
二、代码展示
cpp
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/IO/read_points.h>
#include <CGAL/property_map.h>
#include <CGAL/Surface_mesh.h>
#include <CGAL/Shape_detection/Region_growing/Region_growing.h>
#include <CGAL/Shape_detection/Region_growing/Point_set.h>
#include <CGAL/Polygonal_surface_reconstruction.h>
#include <CGAL/IO/write_ply_points.h>
#include <fstream>
#include <CGAL/Timer.h>
#include <boost/range/irange.hpp>
typedef CGAL::Exact_predicates_inexact_constructions_kernel Kernel;
typedef Kernel::FT FT;
typedef Kernel::Point_3 Point;
typedef Kernel::Vector_3 Vector;
// Point with normal, and plane index.
typedef boost::tuple<Point, Vector, int> PNI;
typedef std::vector<PNI> Point_vector;
typedef CGAL::Nth_of_tuple_property_map<0, PNI> Point_map;
typedef CGAL::Nth_of_tuple_property_map<1, PNI> Normal_map;
typedef CGAL::Nth_of_tuple_property_map<2, PNI> Plane_index_map;
using Point_map_region_growing = CGAL::Compose_property_map<CGAL::Random_access_property_map<Point_vector>, Point_map >;
using Normal_map_region_growing = CGAL::Compose_property_map<CGAL::Random_access_property_map<Point_vector>, Normal_map >;
using Region_type = CGAL::Shape_detection::Point_set::Least_squares_plane_fit_region<Kernel, std::size_t, Point_map_region_growing, Normal_map_region_growing>;
using Neighbor_query = CGAL::Shape_detection::Point_set::Sphere_neighbor_query<Kernel, std::size_t, Point_map_region_growing>;
using Region_growing = CGAL::Shape_detection::Region_growing<Neighbor_query, Region_type>;
//----------------------------------save_points_with_color_about-------------------------------------------
typedef std::array<unsigned char, 4> Color;
typedef std::tuple<Point, Vector, Color> PNC;
typedef CGAL::Nth_of_tuple_property_map<0, PNC> Save_Point_map;
typedef CGAL::Nth_of_tuple_property_map<1, PNC> Save_Normal_map;
typedef CGAL::Nth_of_tuple_property_map<2, PNC> Save_Color_map;
//----------------------------------save_points_with_color_about-------------------------------------------
// Define how a color should be stored
namespace CGAL {
template< class F >
struct Output_rep< ::Color, F > {
const ::Color& c;
static const bool is_specialized = true;
Output_rep(const ::Color& c) : c(c)
{ }
std::ostream& operator() (std::ostream& out) const
{
if (IO::is_ascii(out))
out << int(c[0]) << " " << int(c[1]) << " " << int(c[2]) << " " << int(c[3]);
else
out.write(reinterpret_cast<const char*>(&c), sizeof(c));
return out;
}
};
} // namespace CGAL
int main(int argc, char* argv[])
{
Point_vector points;
// Load point set from a file.
const std::string input_file = "cube_point_cloud.ply";
std::ifstream input_stream(input_file.c_str());
if (input_stream.fail()) {
std::cerr << "Failed open file \'" << input_file << "\'" << std::endl;
return EXIT_FAILURE;
}
input_stream.close();
std::cout << "Loading point cloud: " << input_file << "...";
CGAL::Timer t;
t.start();
if (!CGAL::IO::read_points(input_file.c_str(), std::back_inserter(points),
CGAL::parameters::point_map(Point_map()).normal_map(Normal_map()))) {
std::cerr << "Error: cannot read file " << input_file << std::endl;
return EXIT_FAILURE;
}
else
std::cout << " Done. " << points.size() << " points. Time: "
<< t.time() << " sec." << std::endl;
// Shape detection.
// Default parameter values for the data file cube.pwn.
const FT search_sphere_radius = FT(2) / FT(100);
const std::size_t k = 12;
const FT max_distance_to_plane = FT(0.5) / FT(100);
const FT max_accepted_angle = FT(30);
const std::size_t min_region_size = 500;
Point_map_region_growing point_map_rg(CGAL::make_random_access_property_map(points));
Normal_map_region_growing normal_map_rg(CGAL::make_random_access_property_map(points));
// Create instances of the classes Neighbor_query and Region_type.
Neighbor_query neighbor_query(
boost::irange<std::size_t>(0, points.size()), CGAL::parameters::sphere_radius(search_sphere_radius).point_map(point_map_rg));
//Neighbor_query neighbor_query(
// boost::irange<std::size_t>(0, points.size()), CGAL::parameters::k_neighbors(k).point_map(point_map_rg));
Region_type region_type(
CGAL::parameters::
maximum_distance(max_distance_to_plane).
maximum_angle(max_accepted_angle).
minimum_region_size(min_region_size).
point_map(point_map_rg).
normal_map(normal_map_rg));
// Create an instance of the region growing class.
Region_growing region_growing(
boost::irange<std::size_t>(0, points.size()), neighbor_query, region_type);
std::cout << "Extracting planes...";
std::vector<typename Region_growing::Primitive_and_region> regions;
t.reset();
region_growing.detect(std::back_inserter(regions));
std::cout << " Done. " << regions.size() << " planes extracted. Time: "
<< t.time() << " sec." << std::endl;
// Stores the plane index of each point as the third element of the tuple.
for (std::size_t i = 0; i < points.size(); ++i)
// Uses the get function from the property map that accesses the 3rd element of the tuple.
points[i].get<2>() = static_cast<int>(get(region_growing.region_map(), i));
// 随机生成颜色(要保证颜色种类大于提取的平面个数)
std::vector<Color> rand_colors;
for (size_t i = 0; i < regions.size() + 1; i++)
{
Color p_color = {
static_cast<unsigned char>(rand() % 256),
static_cast<unsigned char>(rand() % 256),
static_cast<unsigned char>(rand() % 256), 255 };
rand_colors.push_back(p_color);
}
std::vector<PNC> points_with_color;
// 为所属平面相同的点赋予相同的颜色
for (std::size_t i = 0; i < points.size(); i++)
{
// 获取单个点坐标
Point point = points[i].get<0>();
// 获得单个点法线
Vector normal = points[i].get<1>();
// 获取点对应的颜色,所属平面相同的点颜色相同
int plane_index = points[i].get<2>();
Color p_color;
if (plane_index == -1) // 未分配平面的点为白色
p_color = { 255, 255, 255, 255 };
else
p_color = rand_colors[plane_index];
points_with_color.push_back(std::make_tuple(point, normal, p_color));
}
std::ofstream f("result.ply", std::ios::binary);
CGAL::IO::set_binary_mode(f); // The PLY file will be written in the binary format
CGAL::IO::write_PLY_with_properties(f, points_with_color,
CGAL::make_ply_point_writer(Save_Point_map()),
CGAL::make_ply_normal_writer(Save_Normal_map()),
std::make_tuple(Save_Color_map(),
CGAL::IO::PLY_property<unsigned char>("red"),
CGAL::IO::PLY_property<unsigned char>("green"),
CGAL::IO::PLY_property<unsigned char>("blue"),
CGAL::IO::PLY_property<unsigned char>("alpha")));
return EXIT_SUCCESS;
}三、结果展示
源文件:由点云组成的立方体

平面检测结果:
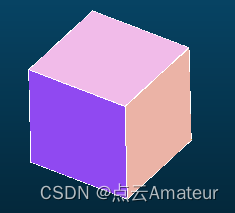
该立方体点云文件可以使用open3D生成。也可以在这里下载。