项目背景
作为亚洲发达国家之一,韩国近年来面临着人口老龄化以及人力成本高昂等问题,对韩国的农业生产和农村经济发展构成了严峻的挑战。面对这一挑战,韩国开始积极探索利用机器人技术来代替人工劳作,以提高农业生产效率,确保食品安全,并促进农村经济的可持续发展。

解决方案
联合韩国某农业机器人有限公司开发了一套先进的搬运机器人解决方案。
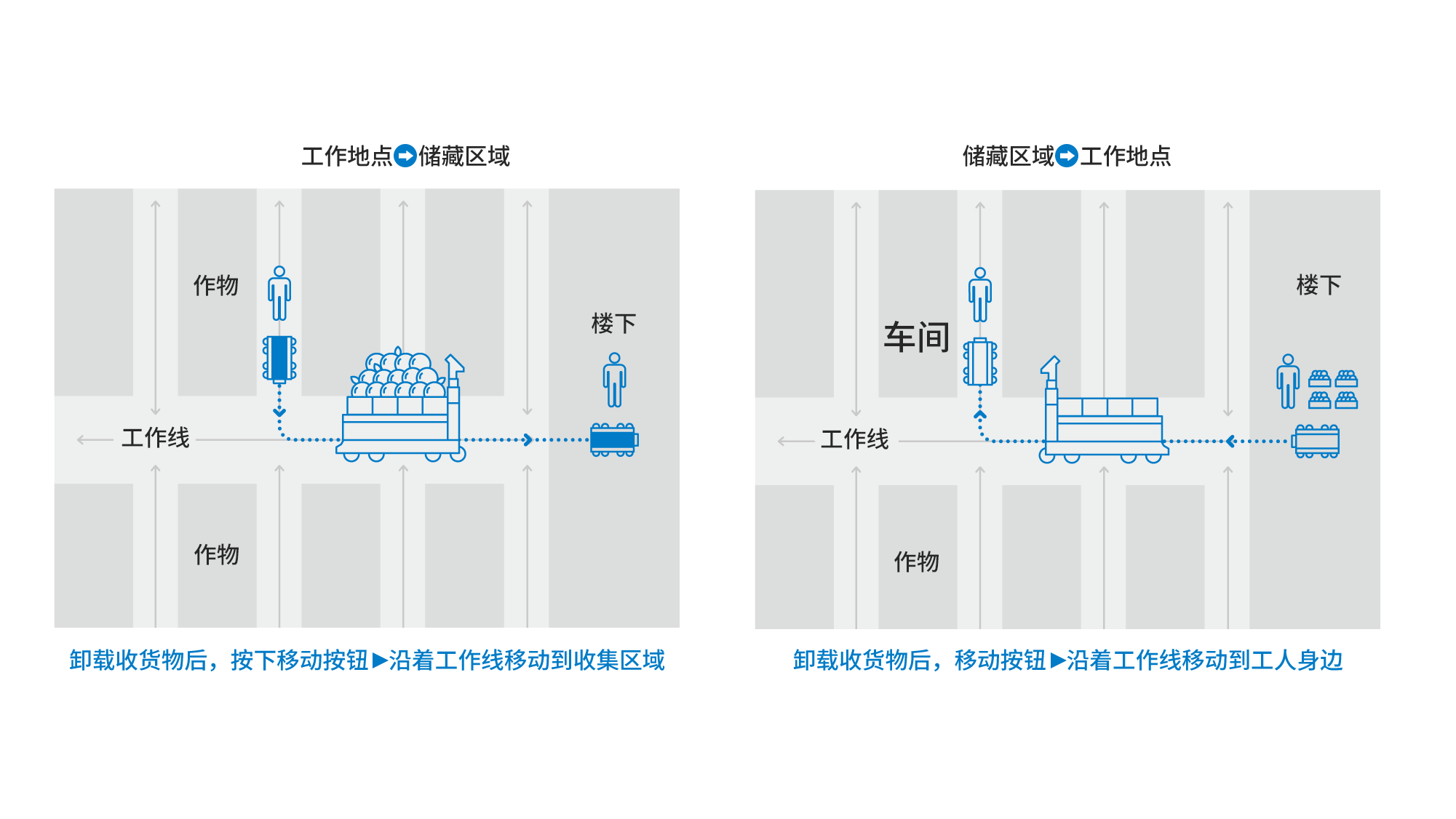
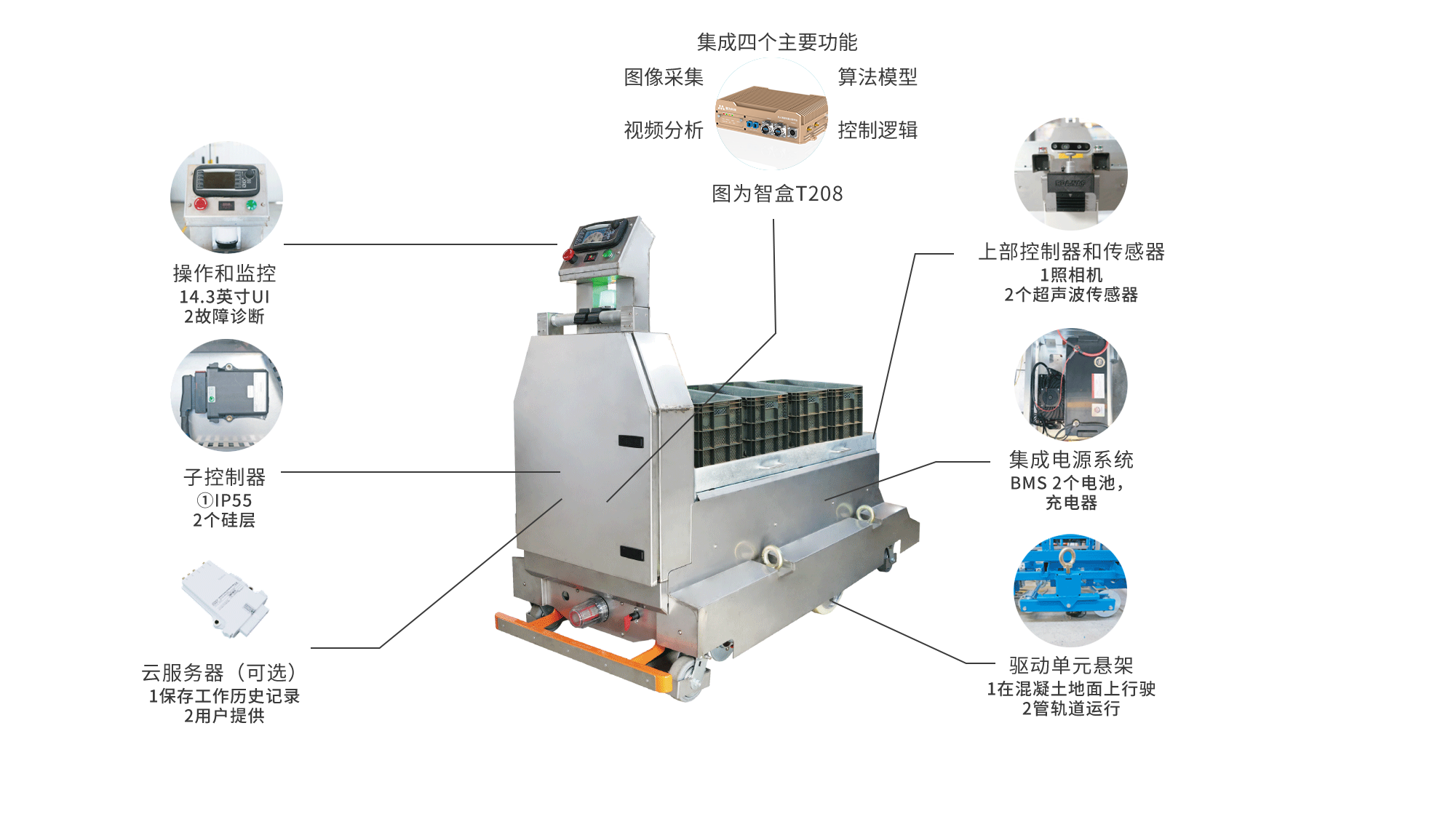
该方案采用"光学传感器+摄像头+超声波传感器"研发自主运行的搬运机器人,跟随工人收集农作物产品,并自动行驶往返运输至收集点。相比传统的人工搬运方式,该方案能够显著降低人力成本,提高农业生产效率。
光学传感器是机器人实现自主导航和避障的关键部件。通过发射和接收光线,光学传感器能够实时感知周围环境,为机器人提供准确的位置信息和障碍物信息。这使得机器人在复杂多变的农田环境中能够自主规划路径,避免与障碍物发生碰撞。
摄像头是机器人视觉系统的重要组成部分。通过摄像头,机器人能够捕捉农作物的图像信息,结合图像识别技术,实现对农作物的快速识别与定位。此外,摄像头还可以用于监控机器人的运行状态,确保机器人在工作过程中始终保持良好的性能。
超声波传感器用于测量机器人与障碍物之间的距离。当机器人接近障碍物时,超声波传感器会发出警报信号,提醒机器人减速或避让。这有助于确保机器人在运行过程中的安全性。
方案 优势
1、自主运行:通过使用先进的光学传感器、摄像头和超声波传感器,机器人能够实时感知周围环境,并自主规划行驶路径。
2、精准定位:通过结合光学传感器和摄像头的数据,机器人能够准确识别并定位农作物和收集点,准确率高达99%以上。
3、高效运输:在收集农作物时,机器人能够自动规划最优路径,确保在最短时间内将农作物运送到收集点,实现了高效、快速的运输。
4、高效负载:机器人可连续不间断工作8小时以上;最高负载力达300kg,大大节省人力成本,提升农业生产效率。
客户收益
1、提高生产力:通过与机器人合作,优化农作物采摘流程,实现农作物的及时收割和快速搬运,提高工作效率,帮助农民提高产量。
2、解决劳动力问题:减少搬运庄稼的重体力劳动人力,减少人力成本。
3、减少工人疲劳:在农场生产环境下,搬运机器人能缩短工人移动时间,解决工人疲劳感,进一步保障了工人的身体健康和生命安全。