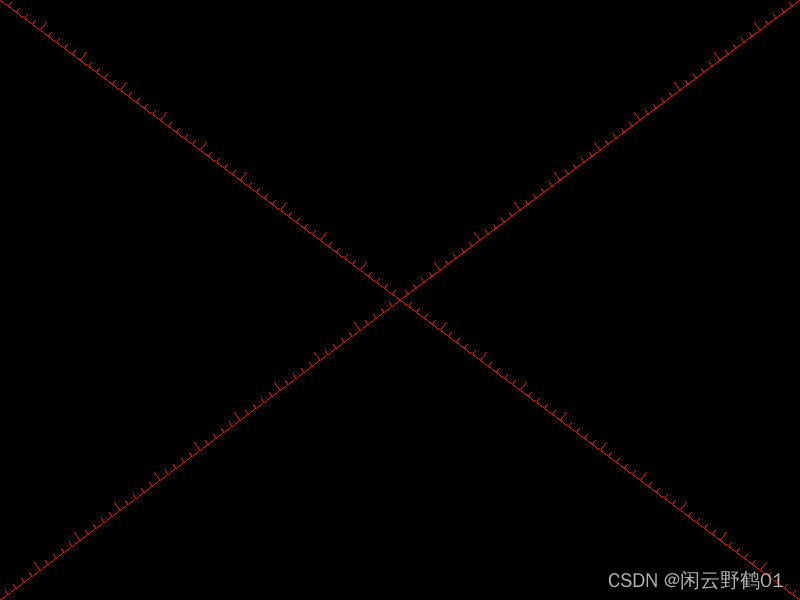
使用OpenCV在图像上绘制带刻度线的对角线,可以通过以下步骤实现。我们将首先找到图像的中心点,然后绘制对角线线,并在这些线的适当位置绘制刻度线。以下是详细的C++代码示例:
void Draw_diagonal(cv::Mat& mat, double dFactor) {
cv::Scalar color = cv::Scalar(0, 0, 255);
if (mat.empty())
{
return;
}
int nSizeFace = cv::FONT_HERSHEY_PLAIN;
int ShortLineSize = 5;
int LenghtLineSize = 10;
int Linesize = 1;
cv::Point CenterPoint = cv::Point(mat.cols / 2.0, mat.rows / 2.0);
cv::Point Point{};
//画十字对角
cv::line(mat, cv::Point(0, 0), cv::Point(mat.cols, mat.rows), color, 1);//竖线
cv::line(mat, cv::Point(0, mat.rows), cv::Point(mat.cols, 0), color, 1);//横线
double lenghtX = sqrt(pow(CenterPoint.x, 2) + pow(CenterPoint.y, 2));
double dx = CenterPoint.x / lenghtX;
double dy = CenterPoint.y / lenghtX;
//std::cout << lenghtX << std::endl;
//画左上刻度线
for (int i_left = 1; i_left < int(lenghtX / dFactor) + 1; i_left++)
{
Point = cv::Point(CenterPoint.x - i_left * dFactor * dx, CenterPoint.y - i_left * dFactor * dy);
if (i_left % 5 == 0) {
//画长线
cv::line(mat, Point, cv::Point(Point.x + dy * LenghtLineSize, Point.y - dx * LenghtLineSize), color, Linesize);//横线
}
else
{
//画短线
cv::line(mat, Point, cv::Point(Point.x + dy * ShortLineSize, Point.y - dx * ShortLineSize), color, Linesize);//横线
}
}
//画左下刻度线
for (int i_left = 1; i_left < int(lenghtX / dFactor) + 1; i_left++)
{
Point = cv::Point(CenterPoint.x + i_left * dFactor * dx, CenterPoint.y + i_left * dFactor * dy);
if (i_left % 5 == 0) {
//画长线
cv::line(mat, Point, cv::Point(Point.x + dy * LenghtLineSize, Point.y - dx * LenghtLineSize), color, Linesize);//横线
}
else
{
//画短线
cv::line(mat, Point, cv::Point(Point.x + dy * ShortLineSize, Point.y - dx * ShortLineSize), color, Linesize);//横线
}
}
//画右上
for (int i_left = 1; i_left < int(lenghtX / dFactor) + 1; i_left++)
{
Point = cv::Point(CenterPoint.x + i_left * dFactor * dx, CenterPoint.y - i_left * dFactor * dy);
if (i_left % 5 == 0) {
//画长线
cv::line(mat, Point, cv::Point(Point.x - dy * LenghtLineSize, Point.y - dx * LenghtLineSize), color, Linesize);//横线
}
else
{
//画短线
cv::line(mat, Point, cv::Point(Point.x - dy * ShortLineSize, Point.y - dx * ShortLineSize), color, Linesize);//横线
}
}
//画左下
for (int i_left = 1; i_left < int(lenghtX / dFactor) + 1; i_left++)
{
Point = cv::Point(CenterPoint.x - i_left * dFactor * dx, CenterPoint.y + i_left * dFactor * dy);
if (i_left % 5 == 0) {
//画长线
cv::line(mat, Point, cv::Point(Point.x - dy * LenghtLineSize, Point.y - dx * LenghtLineSize), color, Linesize);//横线
}
else
{
//画短线
cv::line(mat, Point, cv::Point(Point.x - dy * ShortLineSize, Point.y - dx * ShortLineSize), color, Linesize);//横线
}
}
}
//测试程序
int main() {
// 创建一个空白图像
int width = 800;
int height = 600;
cv::Mat image = cv::Mat::zeros(height, width, CV_8UC3);
int tickLength = 5; // 刻度长度为10像素
// 绘制带刻度线的对角线
Draw_diagonal(image, tickLength);
// 显示图像
cv::imshow("Diagonal with Ticks", image);
cv::waitKey(0);
return 0;
}绘画的结果如下图所示: