协议简介
can协议是一种用于控制网络的通信协议。它是一种基于广播的多主机总线网络协议,常用于工业自动化和控制领域。can协议具有高可靠性、实时性强和抗干扰能力强的特点,被广泛应用于汽车、机械、航空等领域。
can协议采用了先进的冲突检测和错误检测机制,可以在总线上同时存在多个节点进行通信。它的数据帧结构简单且有效,由标识符、控制位、数据字段和错误检测字段组成。
can协议使用了多种数据传输速率,最常见的有经典can(1 Mbps)和can-FD(8 Mbps)。它支持点对点通信、多点通信和广播通信,可以在同一总线上传输多种类型的数据。
can协议还提供了一种灵活的消息优先级机制,可以根据不同的应用需求对消息进行分类和过滤。它还支持错误检测和故障诊断,可以实时检测并纠正通信中出现的错误。
总之,can协议是一种可靠性高、实时性强且适用于各种环境的通信协议,被广泛用于工业自动化和控制系统中。
CAN总线的特征
CAN总线是控制器局域网络(Controller Area Network)的缩写,它是一种用于实时数据通信的串行总线系统。以下是CAN总线的特征:
-
高可靠性:CAN总线采用差分信号传输,具有较强的抗干扰能力和抗噪声能力,能够在恶劣环境条件下稳定运行。
-
高实时性:CAN总线具有很低的延迟和固定的通信时间,适用于实时数据通信和控制应用。
-
多主机通信:CAN总线可以支持多个主机同时进行通信,不需要主从设备的切换。
-
网络拓扑灵活:CAN总线支持多种网络拓扑结构,如总线型、星型、树型等,可以根据实际需求进行灵活布线。
-
高带宽:CAN总线的通信速率可达到1Mbps,能够满足大部分实时数据通信的需求。
-
简化连接:CAN总线使用两根线缆进行数据传输,其中一根为CAN_H线,另一根为CAN_L线,简化了连接和布线的复杂性。
-
易于集成:CAN总线具有较高的兼容性和可扩展性,可以与各种类型的设备集成,如传感器、执行器、控制器等。
总的来说,CAN具有高可靠性、高实时性、灵活性和简化连接的特点,适用于在工业控制、汽车电子、航空航天等领域中进行实时数据通信和控制的应用。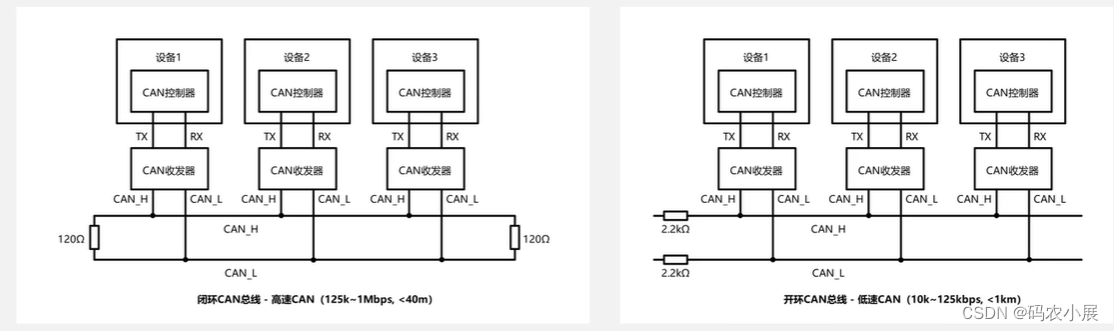
CAN收发器是用于在CAN总线与节点间进行数据传输的专用IC。它的主要作用是将节点的逻辑电平转换为CAN总线上的差分信号,并将CAN总线上的差分信号转换为节点可接收的逻辑电平。
差分信号
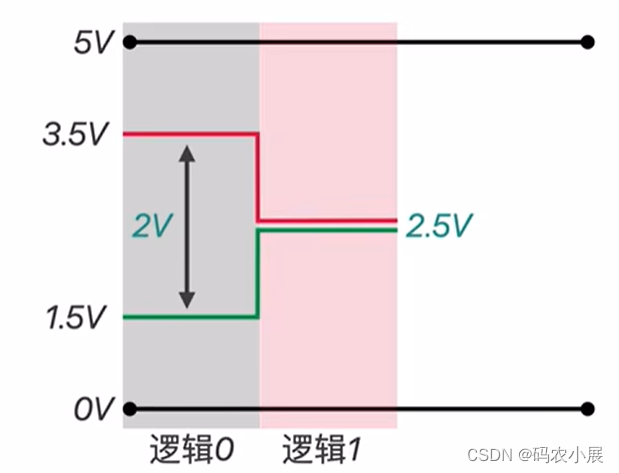
CAN总线使用差分信号来传输数据。差分信号是指将信号分为两个相互互补的信号,即CAN_H和CAN_L。CAN_H是高电平信号,而CAN_L是低电平信号。两个信号之间的差分电压表示数据的传输。
差分信号的优点如下:
-
抗干扰能力强:差分信号可以有效抵御来自噪声和干扰源的干扰。因为CAN总线通常在汽车等强电噪声环境下使用,差分信号的抗干扰能力非常重要。
-
提高信号可靠性:通过比较CAN_H和CAN_L信号的电平差异,CAN接收器可以更准确地判断信号的高低电平,从而提高了信号的可靠性。
-
增加传输距离:差分信号可以在传输过程中衰减较少,因此可以支持较长的传输距离。
-
减小电磁辐射:差分信号避免了单端信号的电磁辐射问题,减少了对周围电子设备的干扰。
CAN协议的数据帧格式
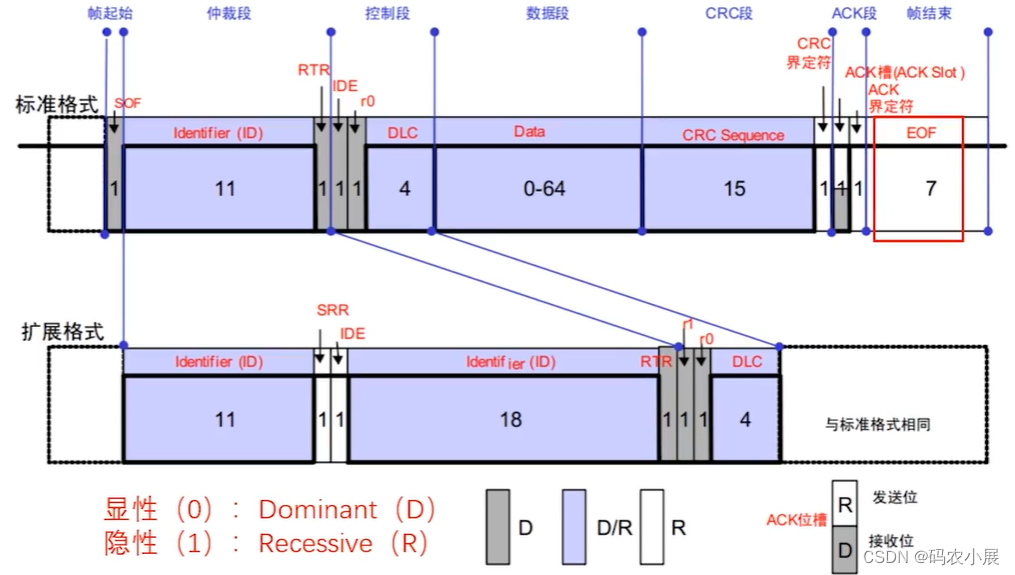
CAN协议的数据帧格式如下:
-
起始位(Start of Frame, SOF):这是一个低电平位,标识一个CAN数据帧的开始。
-
标识符(Identifier):占用11位,用于唯一标识数据帧的发送者和接收者。
-
远程帧标志(Remote Frame Flag, RTR):占用1位,用于区分数据帧和远程帧。数据帧用0表示,远程帧用1表示。
-
扩展帧标志(Extended Frame Flag, EFF):占用1位,用于区分标准帧和扩展帧。标准帧用0表示,扩展帧用1表示。
-
数据长度码(Data Length Code, DLC):占用4位,标识数据域中的数据字节数,取值范围为0~8。
-
数据域(Data Field):根据DLC字段的值,占据0~8个字节。用于传输实际的数据。
-
校验码(CRC):占用15位,用于校验标识符、数据长度码和数据域的内容。
-
帧结束位(End of Frame, EOF):这是一个高电平位,标识一个CAN数据帧的结束。
-
离位位(Intermission, IFS):这是一个高电平位,用于分隔不同的CAN数据帧。
CAN协议示例代码
c
#include "stm32f4xx.h"
#include "stm32f4xx_can.h"
#include "stm32f4xx_rcc.h"
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
CanTxMsg TxMessage;
CanRxMsg RxMessage;
void CAN_Configuration(void)
{
CAN_DeInit(CAN1);
CAN_StructInit(&CAN_InitStructure);
CAN_InitStructure.CAN_TTCM = DISABLE;
CAN_InitStructure.CAN_ABOM = DISABLE;
CAN_InitStructure.CAN_AWUM = DISABLE;
CAN_InitStructure.CAN_NART = DISABLE;
CAN_InitStructure.CAN_RFLM = DISABLE;
CAN_InitStructure.CAN_TXFP = DISABLE;
CAN_InitStructure.CAN_Mode = CAN_Mode_Normal;
CAN_InitStructure.CAN_SJW = CAN_SJW_1tq;
CAN_InitStructure.CAN_BS1 = CAN_BS1_9tq;
CAN_InitStructure.CAN_BS2 = CAN_BS2_8tq;
CAN_InitStructure.CAN_Prescaler = 3;
CAN_Init(CAN1, &CAN_InitStructure);
CAN_FilterInitStructure.CAN_FilterNumber = 0;
CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdMask;
CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_32bit;
CAN_FilterInitStructure.CAN_FilterIdHigh = 0x0000;
CAN_FilterInitStructure.CAN_FilterIdLow = 0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0x0000;
CAN_FilterInitStructure.CAN_FilterFIFOAssignment = 0;
CAN_FilterInitStructure.CAN_FilterActivation = ENABLE;
CAN_FilterInit(&CAN_FilterInitStructure);
}
void CAN_Transmit(uint8_t* data, uint8_t length)
{
uint8_t mbox;
uint16_t i = 0;
TxMessage.StdId = 0x123;
TxMessage.ExtId = 0x01;
TxMessage.IDE = CAN_Id_Standard;
TxMessage.RTR = CAN_RTR_Data;
TxMessage.DLC = length;
for (i = 0; i < length; i++) {
TxMessage.Data[i] = data[i];
}
mbox = CAN_Transmit(CAN1, &TxMessage);
i = 0;
while ((CAN_TransmitStatus(CAN1, mbox) != CAN_TxStatus_Ok) && (i != 0xFFFF)) {
i++;
}
}
void CAN_Receive(void)
{
while (CAN_MessagePending(CAN1, CAN_FIFO0)) {
CAN_Receive(CAN1, CAN_FIFO0, &RxMessage);
// 处理接收到的CAN消息
// ...
}
}
int main(void)
{
/* 初始化CAN和GPIO等外设 */
CAN_Configuration();
while (1) {
// 发送CAN消息
uint8_t sendData[] = {0x12, 0x34, 0x56, 0x78};
CAN_Transmit(sendData, sizeof(sendData));
// 接收CAN消息
CAN_Receive();
}
}