一。交叉编译环境配置
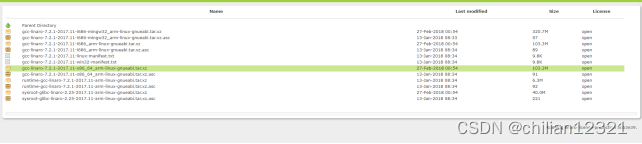
****1.1下载交叉工具链:****https://releases.linaro.org/components/toolchain/binaries/7.2-2017.11/arm-linux-gnueabi/
1.2解压安装
在home目录下新建 工程目录:mkdir f1c100s_project
将windows下的gcc-linaro-7.2.1-2017.11-x86_64_arm-linux-gnueabi.tar.xz 放置在/home/f1c200s/f1c200s_project目录下
解压:tar -vxf gcc-linaro-7.2.1-2017.11-x86_64_arm-linux-gnueabi.tar.xz
其中tar解压缩命令格式如下:
|-------|------------------------------------|
| 选项 | 含义 |
| -x | 对 tar 包做解打包操作。 |
| -f | 指定要解压的 tar 包的包名。 |
| -t | 只查看 tar 包中有哪些文件或目录,不对 tar 包做解打包操作。 |
| -C 目录 | 指定解打包位置。 |
| -v | 显示解打包的具体过程。 |
将解压的文件复制到/usr/local/arm/中
进入目录:cd /usr/local/arm/
拷贝:sudo cp -rf /home/f1c200s/f1c200s_project/gcc-linaro-7.2.1-2017.11-x86_64_arm-linux-gnueabi ./
1.3添加该 交叉编译器的环境变量
只有这样编译器才能在任何目录或者任何位置打开的终端中执行,打开~/.bashrc文件 (修改.bashrc文件,只是针对某一个特定的用户;修改/etc/profile文件,它是针对于所有的用户),写入以下内容:
cd /home/f1c200s/
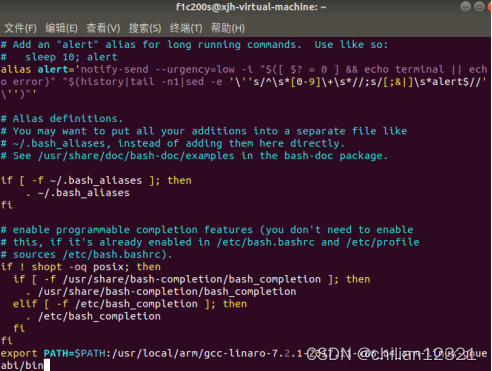
打开文件:sudo vim .bashrc
在文件末尾添加:
export PATH=$PATH:/usr/local/arm/gcc-linaro-7.2.1-2017.11-x86_64_arm-linux-gnueabi/bin
保存退出:wq。
使环境生效:source ~/.bashrc
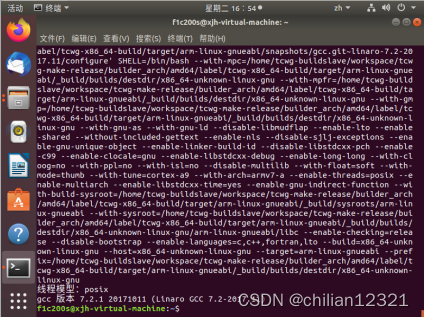
验证是否成功:arm-linux-gnueabi-gcc -v
二. Uboot移植
bootloader主要的工作就是引导 Linux 内核启动,常见的bootloader有 U-Boot、vivi、RedBoot 等等
2.1 uboot 拉取
从gitee上拉取对 Nano 进行了适配的 u-boot:
安装git工具:sudo apt-get install git
拉取代码:git clone https://gitee.com/LicheePiNano/u-boot.git
cd u-boot
查看分支
git branch -a
切换到 Nano 分支
git checkout nano-lcd800480
u-boot对于新手来说目录层级稍显复杂,您可参考下表进行快速的熟悉和目标文件定位

2.2 uboot默认配置
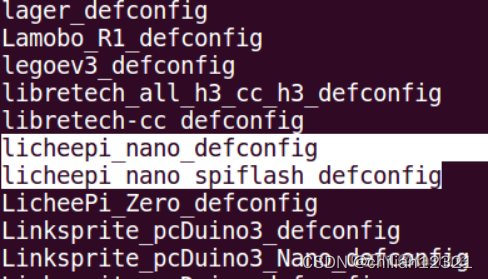
如上图所示,为uboot的configs目录下的两个荔枝派的配置文件,第一个licheepi_nano_defconfig 是针对TF卡的配置文件,第二个licheepi_nano_spiflash_defconfig是针对flash的启动文件,显然我们需要选择第一个配置文件编译uboot,因为我们只有TF卡一种存储介质,没有flash。下面是编译指令:
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- licheepi_nano_defconfig
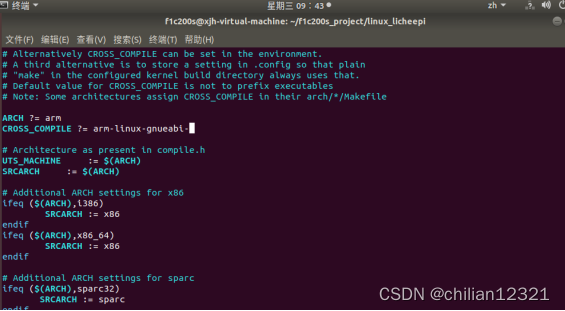
为了避免使用类似于上方的繁琐编译指令,在uboot根目录Makfile中加入如下内容:
ARCH=arm CROSS_COMPILE=arm-linux-gnueabi-
这样我们可以通过以下简洁的代码进行uboot配置:
进入u-boot目录
cd u-boot/
加载配置文件
make licheepi_nano_defconfig (报错可能没有配置ARCH=arm CROSS_COMPILE=arm-linux-gnueabi-)
经过以上操作,默认配置文件licheepi_nano_deconfig已经写入到,/uboot/.config文件中,这是根据默认配置文件,生成的uboot的最终配置文件,这个配置文件记录了所有配置选项的宏开关,我们可以通过宏开关对其进行修改。
2.3 uboot图形界面配置
2.3.1 使用make menuconfig命令进行图形界面配置
ubootEnable boot arguments 选项上点击空格,弹出Boot arguments选项,选中回车输入以下内容后回车保存。用来配置串口,等待5秒,文件系统挂载盘符
console=tty1 console=ttyS0,115200 panic=5 rootwait root=/dev/mmcblk0p2 earlyprintk rw
setenv bootargs "console=tty1 console=ttyS0,115200 panic=5 rootwait root=/dev/mmcblk0p2 earlyprintk rw" 使用uboot 命令
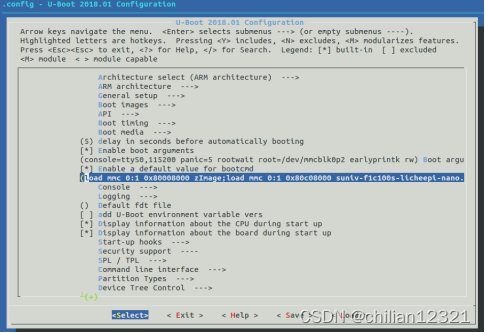
2.3.2同样的操作输入bootcmd的值,输入完成后如下图所示。
load mmc 0:1 0x80008000 zImage;load mmc 0:1 0x80c08000 suniv-f1c100s-licheepi-nano.dtb;bootz 0x80008000 - 0x80c08000;
++++setenv bootcmd "load mmc 0:1 0x80008000 zImage;load mmc 0:1 0x80c08000 suniv-f1c100s-licheepi-nano.dtb;bootz 0x80008000 -x80c08000;"++++ ++++在uboot下 使用 命令添加++++
++++如果移植在片上flash ,使用如下:bootargs=console=ttyS0,115200 panic=5 rootwait root=/dev/mtdblock3 rw rootfstype=jffs2++++
++++bootcmd=sf probe 0 50000000; sf read 0x80C00000 0x100000 0x4000; sf read 0x80008000 0x110000 0x400000; bootz 0x80008000 - 0x80C00000++++
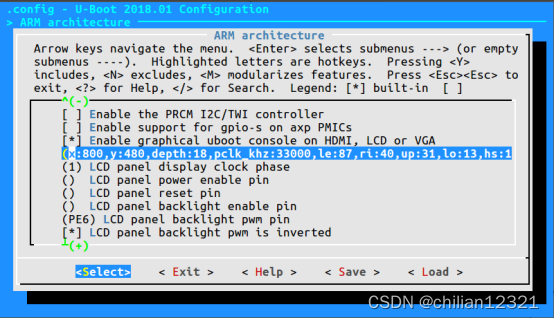
2.3.3若要在套餐中附带的LCD上输出显示
请通过配置 ARM architecture --> Enable graphical uboot console on HDMI, LCD or VGA 为 Y
接着配置同级的 LCD panel timing details 为:
x:480,y:272,depth:18,pclk\khz:10000,le:42,ri:8,up:11,lo:4,hs:1,vs:1,sync:3,vmode:0
注:此块屏为为 480*272规格,如为800*480 请尝试如下配置:
x:800,y:480,depth:18,pclk\khz:33000,le:87,ri:40,up:31,lo:13,hs:1,vs:1,sync:3,vmode:0
并将 LCD panel backlight pwm pin 设为:PE6 (查自 Nano 原理图)
2.4 uboot编译
在进行编译之前需要在Ubuntu 中安装 ncurses 库,否则可能编译会报错,安装命令如下:
sudo apt-get install libncurses5-dev
使用make -j8进行编译
其中-j8代表处理器核心数。编译完成,在根目录下找到u-boot-sunxi-with-spl.bin文件,该文件为最终烧录文件。
2.5 烧录bin文件
只要将u-boot-sunxi-with-spl.bin烧录到tf卡的8k偏移地址处就可以了,至于为什么,上面的引用已经解释清楚了。将准备号的TF卡插入读卡器,使用如下块搬移命令进行烧写:
sudo dd if=u-boot-sunxi-with-spl.bin of=/dev/sdb bs=1024 seek=8
if 文件名:输入文件名,缺省为标准输入。即指定源文件。< if=input file >
of 文件名:输出文件名,缺省为标准输出。即指定目的文件。< of=output file >
bs bytes:同时设置读入/输出的块大小为bytes个字节。
seek blocks:从输出文件开头跳过blocks个块后再开始复制。
这里的输出文件(of)为主机电脑的/dev/sdb文件,也就是插入的读卡器代表的TF卡。
烧录完成,如下图所示,然后弹出读卡器之后再拔出,否则可能损坏读卡器。

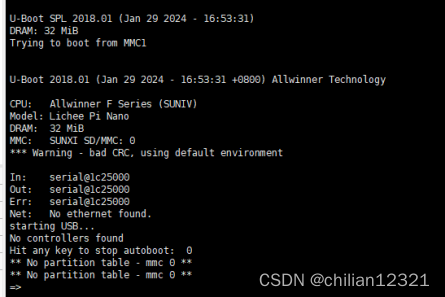
2. 6 uboot启动测试
将开发板使用数据线与电脑相连,打开串口调试工具,根据bootargs参数设置串口通信参数:
选中端口后,波特率设置为115200:
可以看到uboot版本和编译时间:
三 . 内核移植
3.1 内核源码获取
1.下载Linux5.7.1源码,下载后完成后,将代码复制到Ubuntu中并解压。
https://mirror.bjtu.edu.cn/kernel/linux/kernel/v5.x/
- 在Ubuntu上创建自己的文件夹,打开终端拉取
git clone https://gitee.com/LicheePiNano/Linux.git
3.2 内核配置与编译
基础配置与编译
解压完成后,首先在顶层Makfile中指定架构和交叉编译工具。注意:arm必须是小写.
在linux源码目录下:sudo vim Makefile
Linux内核也需要进行配置,使用荔枝派的配置文件, 在arch/arm/configs文件夹中,在根目录使用以下命令配置Linux内核:
Make f1c100s_nano_linux_defconfig (针对2拉取的代码)
可能会报错:

 使用如下命令安装组件:
使用如下命令安装组件:
sudo apt-get install flex
sudo apt-get install bison -y
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- menuconfig 配置菜单栏
使用make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- -j8
命令编译,经过漫长的等待后,在 arch/arm/boot目录下生成内核文件:zImage,在arch/arm/boot/dts目录下设备树文件:suniv-f1c100s-licheepi-nano.dtb。
如果出现以下错误,使用sudo apt install libssl-dev命令安装对应缺失库文件即可。
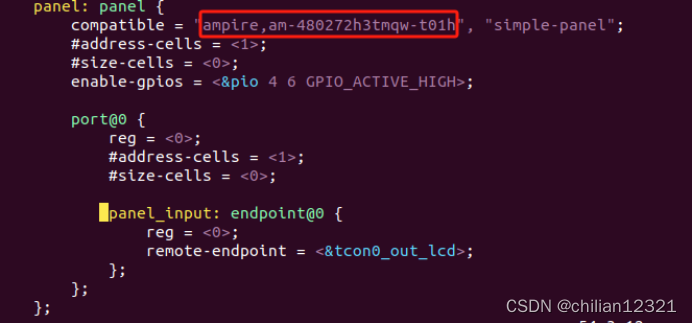
修改屏幕设备树,适配当期使用的屏幕:
~/f1c100s/Linux$ sudo vim arch/arm/boot/dts/suniv-f1c100s-licheepi-nano.dts
3.3 TF卡分区方式1:
uboot移植的时候bootcmd变量记录了内核文件(zImage)和设备树(.dtb文件)的存放位置,那么现在我们就要准备好TF卡的分区,一旦编译出内核文件和设备树文件,就可以放到TF卡的指定位置,启动Linux内核。
打开终端 sudo apt-get install gparted
打开软件sudo gparted
我们需要将TF卡分区如下,其中uboot只能识别FAT16格式,EXT4格式为Linux内核识别格式。注意:一定要把上面图片中的分区删除,否则无法识别到启动文件(zImage、.dtb)。
分区 分区一 分区二
名称 kernel rootfs
分区格式 FAT16 EXT4
大小 32M(可以随意填写) 剩余空间
注意需要给uboot预留1M的空间,在【之前的空余空间】选择1M即可,在上面的可视化分区中无法看到这个预留空间。
3.4 TF卡分区 方式2:
先将SD 卡进行格式化。然后与虚拟机连接。
sudo fdisk -l # 首先查看电脑上已插入的TF卡的设备号
sudo umount /dev/sdb1 # 若自动挂载了TF设备,请先卸载
sudo fdisk /dev/sdb # 进行分区操作
若已存分区即按 d 删除各个分区
通过 n 新建分区,第一分区暂且申请为32M(足够大了...),剩下的空间都给第二分区
w 保存写入并退出
sudo mkfs.vfat /dev/sdb1 # 将第一分区格式化成FAT
sudo mkfs.ext4 /dev/sdb2 # 将第一分区格式化成EXT4
3.5 内核烧录
将上面编译产生的zImage、suniv-f1c100s-licheepi-nano.dtb两个文件拷贝到KERNEL分区。将TF卡插好之后上电,打开串口调试,按下复位按键,等待uboot启动,5秒倒计时结束,读取两个文件,启动Linux内核。至此,Linux内核移植完成,下一步是Linux根文件系统(rootfs)。
- 根文件系统
文件系统是对一个存储设备上的数据和元数据进行组织的机制,这种机制有利于用户和操作系统的交互。
4.1、 buildroot下载
- 方式一:
使用buildroot制作根文件系统,首先进入官网,下载根文件系统buildroot2018.2.11版本
Buildroot - Making Embedded Linux Easy
2.方式二:
首先安装一些依赖,比如linux头文件:
apt-get install linux-headers-$(uname -r)
下载:wget https://buildroot.org/downloads/buildroot-2021.02.4.tar.gz
解压:tar xvf buildroot-2021.02.4.tar.gz
进入目录:cd buildroot-2021.02.4/
4. 2、根文件系统制作
解压完成后进入文件系统根目录,清理工程后,进入图形界面配置:
make clean
make menuconfig
图形配置界面如下图所示,使用方向键选择不同选项,空格进行选中,回车进行确认。
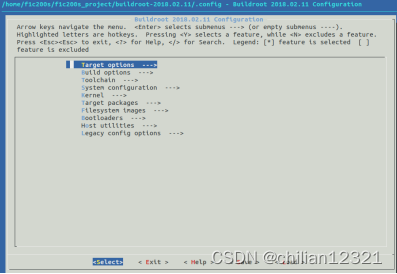
Target options选项的配置如下图所示
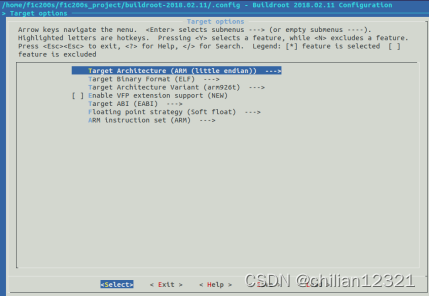
第一个选项为架构选择,这里选择ARM架构小端模式,
第二个为输出的二进制文件格式,这里选择EFL格式,
第三个为架构体系,这里选择arm926t,因为F1C200S/F1C100S的架构就是这个架构,
第四个为矢量浮点处理器,这里不勾选,因为对于F1C200S/F1C100S而言,其内部没有浮点运算单元,只能进行软浮点运算,也就是模拟浮点预运算。
第五个为应用程序二进制接口,这里选择EABI,原因是该格式支持软件浮点和硬件实现浮点功能混用。
第六个为浮点运算规则,这里使用软件浮点
第七个选择指令集,这里选择ARM指令集,因为thumb主要针对Cortex M系列而言的,对于运行操作系统的A系列以及ARM9和ARM11而言,使用的都是32位的ARM指令集。
Toolchain按照下方配置(打开了一些功能)可以在开发板上直接编译程序。
C library (musl) # 使用musl减小最终体积。
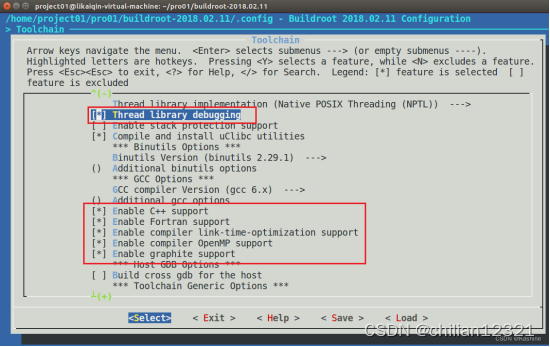
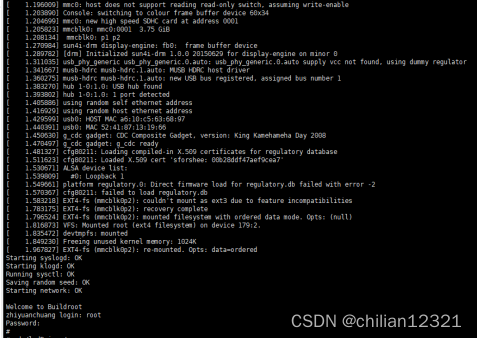
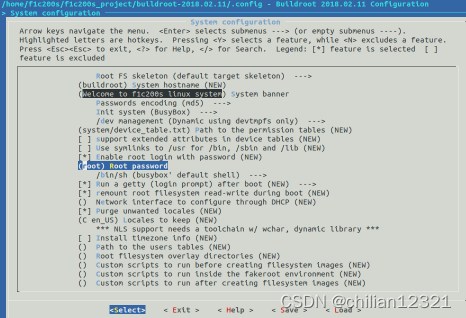
登录的时候会显示 "Welcome to f1c200s linux system." ,并且我们设置了root用户密码为"root"。
配置完成后保存,使用make命令进行编译,从下面可以看出,buildroot的编译需要网络支持,以通过网络配置我们选择的内容。 当然如果你的虚拟机无法连接网络,请看虚拟机ubuntu桥接怎么联网,或者是虚拟机net模式访问互联网。
终于编译完成了!编译完成后,在buildroot根目录的output/images目录下生成一个rootfs.rar文件,这个就是我们心心念念的根文件系统。
输出文件全部在output/目录下:
images/ --- 存放编译后产生的所有镜像文件( 内核镜像 , 加载引导镜像 和 根文件系统镜像)
build/ --- 存放所有的组件除了构建交叉编译工具链的组件 , 在这个目录里面每一个功能对应一个子目录存放他们各自的组件.
staging/ --- 包含一个类似于根文件系统等级层次的层级 . 这个目录包含了 安装的交叉编译工具链 和 所有被选择用于目标板的所有用户空间包.
target/ --- 包含了根文件系统,但不能用于你的开发板的
host/ --- 包含了我们需要的交叉编译工具集

3、根文件系统移植
将上面得到的rootfs.rar解压到TF卡的第二个分区,也就是rootfs分区,不要解压完成在复制过去,因为解压出来好多文件夹。两种选择,要么把压缩包复制到rootfs分区,解压后删除压缩包,要么直接解压到第二分区。使用如下命令将压缩包解压到rootfs分区后如下图所示:
sudo tar -vxf rootfs.tar -C /media/ sd 卡分区二 /
4、根文件系统加载
TF卡第二个分区内已经放置了我们制作好的根文件系统,将TF卡插到开发板上并上电启动,打开串口调试助手,设置波特率115200,可以看到下面的内容,uboot和内核启动成功。
root为管理员用户名,密码为前面设置的root