- 操作系统:ubuntu22.04
- OpenCV版本:OpenCV4.9
- IDE:Visual Studio Code
- 编程语言:C++11
1.功能描述
opencv_contrib中有一个用于快速检测直线的类,叫FastLineDetector,下面介绍一下如何使用它,首先要用到一个cv::ximgproc::createFastLineDetector函数,然后会使用一个类EdgeDrawing,
2.类FastLineDetector
2.1 detect()函数
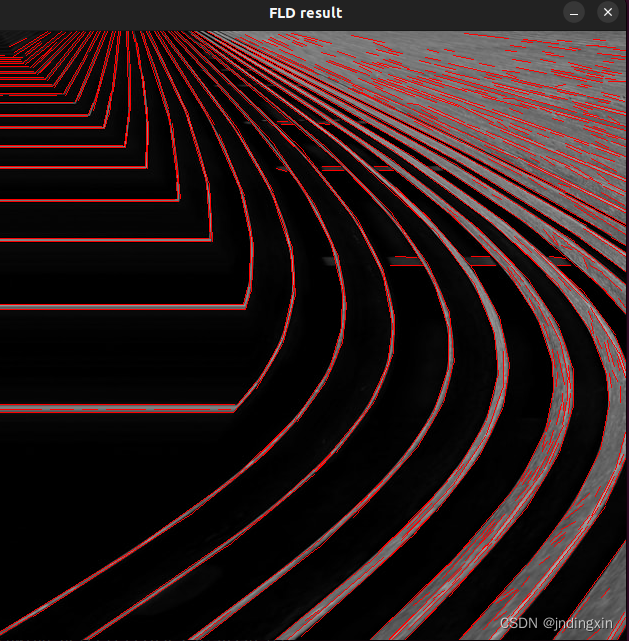
在输入图像中寻找线条。下图是采用算法默认参数进行处理后的输出结果。

2.1.1 原型
cpp
virtual void cv::ximgproc::FastLineDetector::detect (
InputArray image,
OutputArray lines
) 2.1.2参数
-
参数image 一个灰度图像(CV_8UC1格式)作为输入。如果只需要选择图像中的某个感兴趣区域(ROI)进行检测,可以使用如下方法:fld_ptr->detect(image(roi), lines, ...); 然后将检测到的线条坐标加上ROI的偏移量,即 lines += Scalar(roi.x, roi.y, roi.x, roi.y)。这样处理后,得到的线条坐标会自动调整为相对于原图的正确位置。
-
参数lines 一个由Vec4f元素组成的向量,用于指定线条的起始点和结束点。其中,Vec4f表示为(x1, y1, x2, y2),点1是线条的起点,点2是线条的终点。返回的线条方向设定为使得较亮的一侧位于线条的左侧。
2.2 drawSegments函数
在给定的图像上绘制线段
2.2.1原型
cpp
virtual void cv::ximgproc::FastLineDetector::drawSegments (
InputOutputArray image,
InputArray lines,
bool draw_arrow = false,
Scalar linecolor = Scalar(0, 0, 255),
int linethickness = 1
) 2.2.2参数
- 参数 image 用于绘制线段的图像。此图像应大于或等于找到线段的原始图像尺寸。
- 参数 lines 需要被绘制的线条的向量.
- 参数 draw_arrow 如果为真,将绘制箭头头部.
- 参数 linecolor 线的颜色.
- 参数 linethickness 线的厚度.
3 类EdgeDrawing
这个类实现了一系列边缘检测与特征提取算法,包括ED(EdgeDrawing)267、EDLines 4、EDPF 5 和 EDCircles 6。这些算法主要用于图像处理领域,旨在从图像中识别出边缘、线段、特定模式(如圆)以及可能的其他特征。EdgeDrawing专注于边缘的高效抽取,EDLines专门用于线段检测,EDPF可能是指在某些特定条件或优化下的边缘和线段检测,而EDCircles则是用于检测圆形结构。此类的实现能够为图像分析和计算机视觉任务提供强大的工具。
3.1函数 detectEdges (InputArray src)
该操作在灰度图像中检测边缘。
3.1.1原型
cpp
virtual void cv::ximgproc::EdgeDrawing::detectEdges ( InputArray src ) 3.2 函数detectLines
进行直线检测
3.2.1 原型
cpp
virtual void cv::ximgproc::EdgeDrawing::detectLines (
OutputArray lines
) 3.3函数detectEllipses
检测圆形和椭圆
3.3.1原型
cpp
virtual void cv::ximgproc::EdgeDrawing::detectEllipses (
OutputArray ellipses
) 3.4函数getSegments
返回检测到的边缘段组成的 std::vector<std::vector>,详情请参见 detectEdges() 函数
3.4.1原型
cpp
virtual std::vector<std::vector<Point> > cv::ximgproc::EdgeDrawing::getSegments ( ) 4 createFastLineDetector函数
这个函数是创建一个FastLineDetector的智能指针,并且对他进行初始化。
4.1函数原型
cpp
Ptr<FastLineDetector> cv::ximgproc::createFastLineDetector (
int length_threshold = 10,
float distance_threshold = 1.414213562f,
double canny_th1 = 50.0,
double canny_th2 = 50.0,
int canny_aperture_size = 3,
bool do_merge = false
) 4.2参数描述
- 参数length_threshold 长度阈值,线段长度小于这个阈值就会被丢弃。
- 参数distance_threshold 距离阈值 如果一个点距离假设的线段超过此设定值,那么该点将被视为异常点
- 参数canny_th1 Canny算法中的第一个阈值用于执行滞后阈值过程
- 参数canny_th2 Canny算法中的第二个阈值用于执行滞后阈值过程
- 参数canny_aperture_size 在Canny()算法中用于Sobel算子的孔径尺寸。如果设为零,则不应用Canny算法,直接将输入图像作为边缘图像使用。.
- 参数 do_merge 如果为真,则将执行片段的增量合并。
5 示例代码
cpp
#include "opencv2/highgui.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/ximgproc.hpp"
#include <iostream>
using namespace std;
using namespace cv;
using namespace cv::ximgproc;
int main( int argc, char** argv )
{
// 读取图像并转换为灰度
cv::Mat image = cv::imread( "/media/dingxin/data/study/OpenCV/sources/images/line.jpg", cv::IMREAD_GRAYSCALE );
if ( image.empty() )
{
std::cerr << "Could not open or find the image" << std::endl;
return -1;
}
imshow( "原灰度图", image );
// Create FLD detector
// Param Default value Description
// length_threshold 10 - Segments shorter than this will be discarded
// distance_threshold 1.41421356 - A point placed from a hypothesis line
// segment farther than this will be
// regarded as an outlier
// canny_th1 50 - First threshold for
// hysteresis procedure in Canny()
// canny_th2 50 - Second threshold for
// hysteresis procedure in Canny()
// canny_aperture_size 3 - Aperturesize for the sobel operator in Canny().
// If zero, Canny() is not applied and the input
// image is taken as an edge image.
// do_merge false - If true, incremental merging of segments
// will be performed
int length_threshold = 10;
float distance_threshold = 1.41421356f;
double canny_th1 = 50.0;
double canny_th2 = 50.0;
int canny_aperture_size = 3;
bool do_merge = false;
Ptr< FastLineDetector > fld = createFastLineDetector( length_threshold, distance_threshold, canny_th1, canny_th2, canny_aperture_size, do_merge );
vector< Vec4f > lines;
//由于某些CPU的电源管理策略,首次运行算法时似乎需要更长的时间。
//因此,我们在这里对算法进行10次运行,以充分预热CPU性能后,了解算法的实际处理时间。
for ( int run_count = 0; run_count < 5; run_count++ )
{
double freq = getTickFrequency();
lines.clear();
int64 start = getTickCount();
// 使用FLD检测线段
fld->detect( image, lines );
double duration_ms = double( getTickCount() - start ) * 1000 / freq;
cout << "Elapsed time for FLD " << duration_ms << " ms." << endl;
}
// 显示用FLD找到的线
Mat line_image_fld( image );
fld->drawSegments( line_image_fld, lines );
imshow( "FLD result", line_image_fld );
waitKey( 1 );
Ptr< EdgeDrawing > ed = createEdgeDrawing();
ed->params.EdgeDetectionOperator = EdgeDrawing::SOBEL;
ed->params.GradientThresholdValue = 38;
ed->params.AnchorThresholdValue = 8;
vector< Vec6d > ellipses;
for ( int run_count = 0; run_count < 5; run_count++ )
{
double freq = getTickFrequency();
lines.clear();
int64 start = getTickCount();
// Detect edges
// you should call this before detectLines() and detectEllipses()
ed->detectEdges( image );
// Detect lines
ed->detectLines( lines );
double duration_ms = double( getTickCount() - start ) * 1000 / freq;
cout << "Elapsed time for EdgeDrawing detectLines " << duration_ms << " ms." << endl;
start = getTickCount();
// Detect circles and ellipses
ed->detectEllipses( ellipses );
duration_ms = double( getTickCount() - start ) * 1000 / freq;
cout << "Elapsed time for EdgeDrawing detectEllipses " << duration_ms << " ms." << endl;
}
Mat edge_image_ed = Mat::zeros( image.size(), CV_8UC3 );
vector< vector< Point > > segments = ed->getSegments();
for ( size_t i = 0; i < segments.size(); i++ )
{
const Point* pts = &segments[ i ][ 0 ];
int n = ( int )segments[ i ].size();
polylines( edge_image_ed, &pts, &n, 1, false, Scalar( ( rand() & 255 ), ( rand() & 255 ), ( rand() & 255 ) ), 1 );
}
imshow( "EdgeDrawing detected edges", edge_image_ed );
Mat line_image_ed( image );
fld->drawSegments( line_image_ed, lines );
// 画圆和椭圆
for ( size_t i = 0; i < ellipses.size(); i++ )
{
Point center( ( int )ellipses[ i ][ 0 ], ( int )ellipses[ i ][ 1 ] );
Size axes( ( int )ellipses[ i ][ 2 ] + ( int )ellipses[ i ][ 3 ], ( int )ellipses[ i ][ 2 ] + ( int )ellipses[ i ][ 4 ] );
double angle( ellipses[ i ][ 5 ] );
Scalar color = ellipses[ i ][ 2 ] == 0 ? Scalar( 255, 255, 0 ) : Scalar( 0, 255, 0 );
ellipse( line_image_ed, center, axes, angle, 0, 360, color, 2, LINE_AA );
}
imshow( "EdgeDrawing result", line_image_ed );
waitKey();
// return 0;
return 0;
}6 结果
原图:

FLD结果图:
EdgeDrawing 检测结果(线段)

EdgeDrawing 结果(画圆和椭圆):
