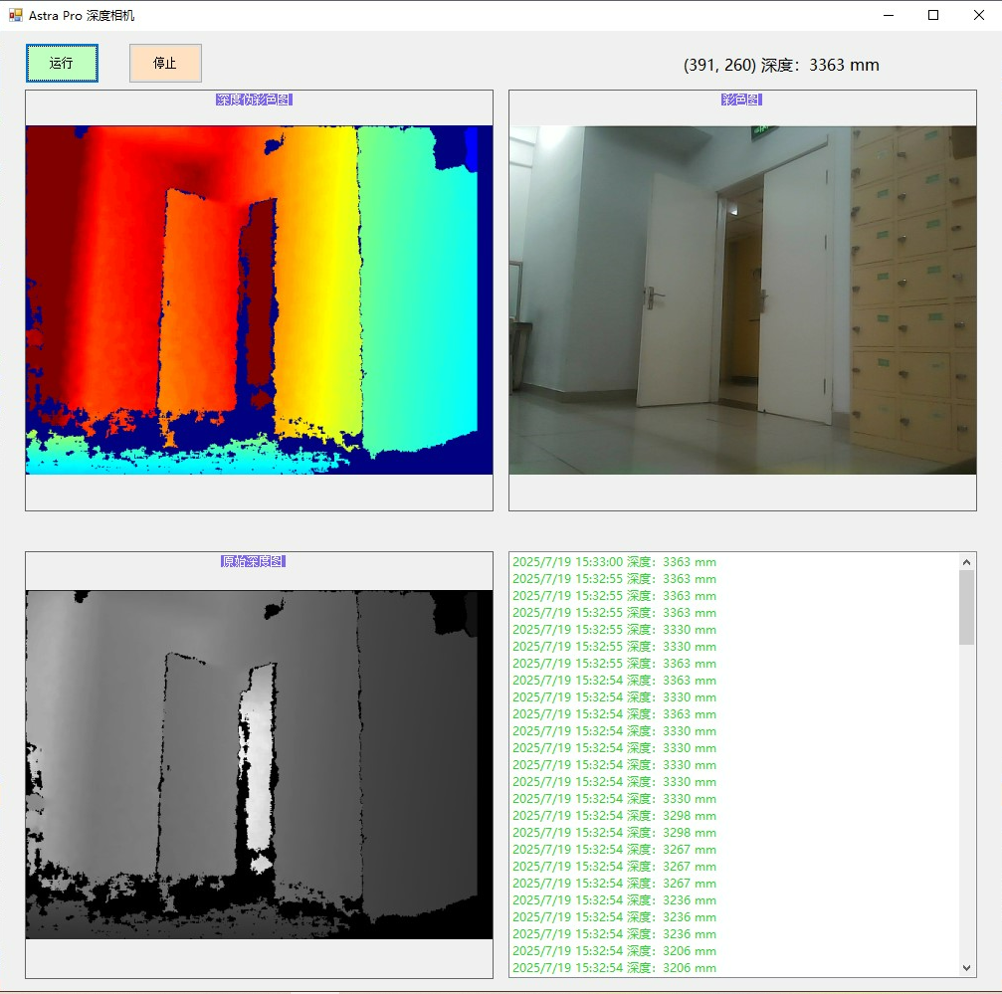
在某鱼花了90RMB,买了个Astra Pro奥比中光深度相机,性价比还是比较高的。通过封装官方的SDK,导出为dll给C#调用,效果如下
///////////AstraCamera.cs////////////
using System;
using System.Runtime.InteropServices;
using System.Threading;
using System.Drawing;
using OpenCvSharp;
using OpenCvSharp.Extensions;
public class AstraCamera : IDisposable
{
// DLL导入
DllImport("ColorReaderEventCPP.dll", CallingConvention = CallingConvention.StdCall)
private static extern void StartCamera();
DllImport("ColorReaderEventCPP.dll", CallingConvention = CallingConvention.StdCall)
private static extern void StopCamera();
DllImport("ColorReaderEventCPP.dll", CallingConvention = CallingConvention.StdCall)
private static extern bool GetLatestFrames(
IntPtr rawDepthData, int rawDepthSize,
IntPtr depthData, int depthSize,
IntPtr colorData, int colorSize);
DllImport("ColorReaderEventCPP.dll", CallingConvention = CallingConvention.StdCall)
private static extern void GetFrameInfo(
out int rawDepthWidth, out int rawDepthHeight, out int rawDepthType,
out int depthWidth, out int depthHeight, out int depthType,
out int colorWidth, out int colorHeight, out int colorType);
// 图像属性
public int RawDepthWidth;
public int RawDepthHeight;
public MatType RawDepthType { get; private set; }
public int DepthWidth;
public int DepthHeight;
public MatType DepthType { get; private set; }
public int ColorWidth;
public int ColorHeight;
public MatType ColorType { get; private set; }
// 非托管内存缓冲区
private IntPtr _rawDepthBuffer;
private IntPtr _depthBuffer;
private IntPtr _colorBuffer;
private int _rawDepthBufferSize;
private int _depthBufferSize;
private int _colorBufferSize;
// 当前帧
public Mat RawDepthFrame { get; private set; } // 原始深度图 (16位)
public Mat DepthFrame { get; private set; } // 伪彩色深度图
public Mat ColorFrame { get; private set; } // 彩色图
// 更新事件
public event Action FramesUpdated;
// 后台线程
private Thread _updateThread;
private bool _isRunning;
public AstraCamera()
{
// 获取帧信息
GetFrameInfo(out RawDepthWidth, out RawDepthHeight, out int rawDepthType,
out DepthWidth, out DepthHeight, out int depthType,
out ColorWidth, out ColorHeight, out int colorType);
// 转换为MatType
RawDepthType = (MatType)rawDepthType;
DepthType = (MatType)depthType;
ColorType = (MatType)colorType;
// 计算缓冲区大小
_rawDepthBufferSize = RawDepthWidth * RawDepthHeight * sizeof(ushort); // 16位深度图
_depthBufferSize = DepthWidth * DepthHeight * 3; // 伪彩色图 (3通道)
_colorBufferSize = ColorWidth * ColorHeight * 3; // 彩色图 (3通道)
// 分配非托管内存
_rawDepthBuffer = Marshal.AllocHGlobal(_rawDepthBufferSize);
_depthBuffer = Marshal.AllocHGlobal(_depthBufferSize);
_colorBuffer = Marshal.AllocHGlobal(_colorBufferSize);
// 创建Mat对象
RawDepthFrame = new Mat(RawDepthHeight, RawDepthWidth, RawDepthType);
DepthFrame = new Mat(DepthHeight, DepthWidth, DepthType);
ColorFrame = new Mat(ColorHeight, ColorWidth, ColorType);
// 启动相机
StartCamera();
_isRunning = true;
// 启动更新线程
_updateThread = new Thread(UpdateFrames);
_updateThread.IsBackground = true;
_updateThread.Start();
}
private void UpdateFrames()
{
while (_isRunning)
{
// 获取最新帧
if (GetLatestFrames(
_rawDepthBuffer, _rawDepthBufferSize,
_depthBuffer, _depthBufferSize,
_colorBuffer, _colorBufferSize))
{
// 将数据复制到Mat
RawDepthFrame = new Mat(RawDepthHeight, RawDepthWidth, RawDepthType, _rawDepthBuffer);
Cv2.Flip(RawDepthFrame,RawDepthFrame,FlipMode.Y);
DepthFrame = new Mat(DepthHeight, DepthWidth, DepthType, _depthBuffer);
Cv2.Flip(DepthFrame, DepthFrame, FlipMode.Y);
ColorFrame = new Mat(ColorHeight, ColorWidth, ColorType, _colorBuffer);
Cv2.Flip(ColorFrame, ColorFrame, FlipMode.Y);
// 触发更新事件
FramesUpdated?.Invoke();
}
Thread.Sleep(30); // 约30fps
}
}
// 转换为Bitmap用于PictureBox显示
public Bitmap GetRawDepthBitmap()
{
// 将16位深度图转换为8位显示
using (Mat normalized = new Mat())
{
double min, max;
RawDepthFrame.MinMaxLoc(out min, out max);
RawDepthFrame.ConvertTo(normalized, MatType.CV_8UC1, 255.0 / (max - min), -min * 255.0 / (max - min));
return normalized.ToBitmap();
}
}
public Bitmap GetDepthBitmap()
{
return DepthFrame.ToBitmap();
}
public Bitmap GetColorBitmap()
{
return ColorFrame.ToBitmap();
}
public void Dispose()
{
_isRunning = false;
_updateThread?.Join(1000);
StopCamera();
Marshal.FreeHGlobal(_rawDepthBuffer);
Marshal.FreeHGlobal(_depthBuffer);
Marshal.FreeHGlobal(_colorBuffer);
RawDepthFrame?.Dispose();
DepthFrame?.Dispose();
ColorFrame?.Dispose();
}
}
/////////////AstraProCamera.cs////////////////
using System;
using System.Drawing;
using System.Runtime.InteropServices;
using System.Runtime.Remoting.Contexts;
using System.Windows.Forms;
using OpenCvSharp;
namespace WindowsFormsApp1
{
public partial class AstraProCamera : Form
{
public AstraProCamera()
{
InitializeComponent();
}
private AstraCamera _astraCamera;
private Mat depthMat;
private void InitializeCamera()
{
try
{
_astraCamera = new AstraCamera();
_astraCamera.FramesUpdated += UpdatePictureBoxes;
}
catch (Exception ex)
{
MessageBox.Show($"Camera initialization failed: {ex.Message}");
Close();
}
}
private void UpdatePictureBoxes()
{
// 使用BeginInvoke确保UI线程更新
if (_depthPictureBox.InvokeRequired || _colorPictureBox.InvokeRequired)
{
BeginInvoke(new Action(UpdatePictureBoxes));
return;
}
try
{
// 更新原始深度图
depthMat = _astraCamera.RawDepthFrame.Clone();
using (var rawDepthBitmap = _astraCamera.GetRawDepthBitmap())
{
_rawDepthPictureBox.Image?.Dispose();
_rawDepthPictureBox.Image = new Bitmap(rawDepthBitmap);
}
// 更新深度图
using (var depthBitmap = _astraCamera.GetDepthBitmap())
{
_depthPictureBox.Image?.Dispose();
_depthPictureBox.Image = new Bitmap(depthBitmap);
}
// 更新彩色图
using (var colorBitmap = _astraCamera.GetColorBitmap())
{
_colorPictureBox.Image?.Dispose();
_colorPictureBox.Image = new Bitmap(colorBitmap);
//Bitmap flipped = FlipX(colorBitmap);
//_colorPictureBox.Image = flipped;
}
}
catch (Exception ex)
{
Console.WriteLine($"Update error: {ex.Message}");
}
}
private void button3_Click(object sender, EventArgs e)
{
InitializeCamera();
}
private void button4_Click(object sender, EventArgs e)
{
_astraCamera.Dispose();
}
// 计算图片在PictureBox中的显示区域
private RectangleF GetImageDisplayRectangle(PictureBox picBox)
{
if (picBox.Image == null) return RectangleF.Empty;
System.Drawing.Size imgSize = picBox.Image.Size;
System.Drawing.Size boxSize = picBox.ClientSize;
switch (picBox.SizeMode)
{
case PictureBoxSizeMode.Normal:
case PictureBoxSizeMode.AutoSize:
return new RectangleF(0, 0, imgSize.Width, imgSize.Height);
case PictureBoxSizeMode.StretchImage:
return new RectangleF(0, 0, boxSize.Width, boxSize.Height);
case PictureBoxSizeMode.Zoom:
float ratio = Math.Min(
(float)boxSize.Width / imgSize.Width,
(float)boxSize.Height / imgSize.Height);
float width = imgSize.Width * ratio;
float height = imgSize.Height * ratio;
float x = (boxSize.Width - width) / 2;
float y = (boxSize.Height - height) / 2;
return new RectangleF(x, y, width, height);
case PictureBoxSizeMode.CenterImage:
return new RectangleF(
(boxSize.Width - imgSize.Width) / 2,
(boxSize.Height - imgSize.Height) / 2,
imgSize.Width,
imgSize.Height);
default:
return RectangleF.Empty;
}
}
private static int Clamp(int value, int min, int max)
{
return value < min ? min : (value > max ? max : value);
}
private void _colorPictureBox_MouseMove(object sender, MouseEventArgs e)
{
if (_depthPictureBox.Image == null) return;
// 获取图片原始尺寸和PictureBox显示区域
int imgWidth = _depthPictureBox.Image.Width;
int imgHeight = _depthPictureBox.Image.Height;
RectangleF displayRect = GetImageDisplayRectangle(_depthPictureBox);
// 检查点击是否在图片区域内
if (!displayRect.Contains(e.Location)) return;
// 计算实际图片坐标
float scaleX = imgWidth / displayRect.Width;
float scaleY = imgHeight / displayRect.Height;
int actualX = (int)((e.X - displayRect.X) * scaleX);
int actualY = (int)((e.Y - displayRect.Y) * scaleY);
// 确保坐标在图片范围内
actualX = Clamp(actualX, 0, imgWidth - 1);
actualY = Clamp(actualY, 0, imgHeight - 1);
ushort depth = depthMat.At<ushort>(actualY, actualX);
listBox1.Items.Insert(0, $"{DateTime.Now.ToString()} 深度:{depth} mm");
label4.Text = $"({actualX}, {actualY}) 深度:{depth} mm";
}
}
}