目录
一、核心概念:结构元素(Kernel)
结构元素是形态学操作的 "工具",通常是一个由 0 和 1 组成的矩阵(如 3×3、4×4 的矩形)。操作时,结构元素会遍历图像的每个像素,根据结构元素与对应区域像素的关系(完全覆盖、部分覆盖等)决定输出像素的值。
二、基础形态学操作及代码实现
1.图像腐蚀
原理 :
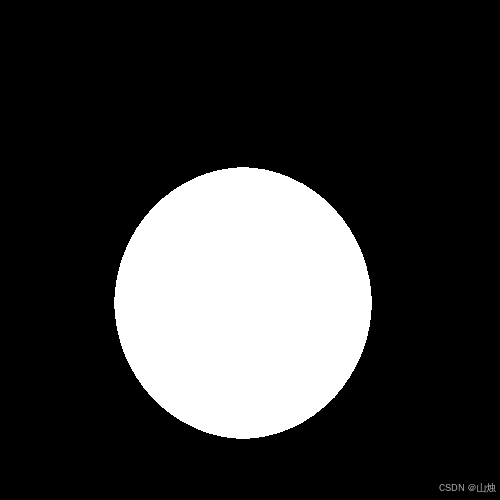
腐蚀操作会使前景物体边界向内收缩。其核心逻辑是:用结构元素遍历图像,当结构元素的所有像素都完全处于前景区域(即结构元素与前景完全重叠)时,才保留结构元素中心位置的像素为前景;否则将该像素设为背景。
效果:可消除小噪声、断开细连接、减小物体尺寸。
代码实现:
python
import cv2
import numpy as np
# 腐蚀函数:cv2.erode(src, kernel, dst, anchor, iterations, borderType, borderValue)
# 参数说明:
# src: 输入图像
# kernel: 结构元素,若为Mat()则默认3×3矩形
# iterations: 迭代次数,次数越多腐蚀效果越明显
sun = cv2.imread('sun.png')
cv2.imshow('src', sun)
cv2.waitKey(0)
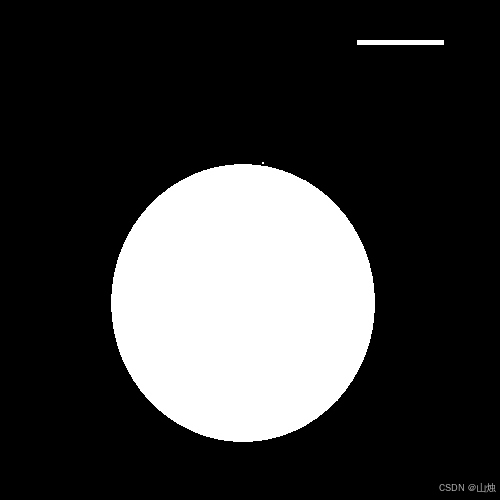
kernel = np.ones((4, 4), np.uint8) # 定义4×4结构元素
erosion_1 = cv2.erode(sun, kernel, iterations=2) # 迭代2次腐蚀
cv2.imshow('erosion_1', erosion_1)
cv2.waitKey(0)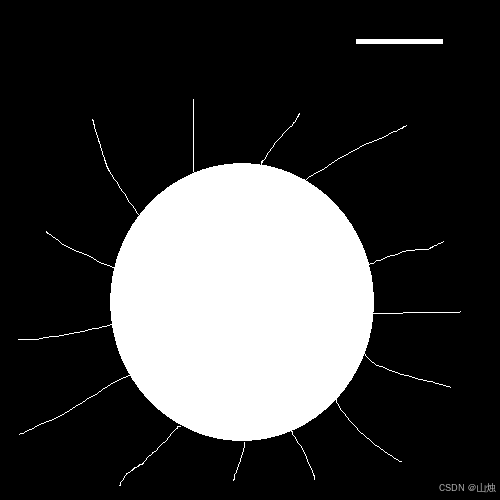 src
src
 erosion_1
erosion_1
2.图像膨胀
原理 :
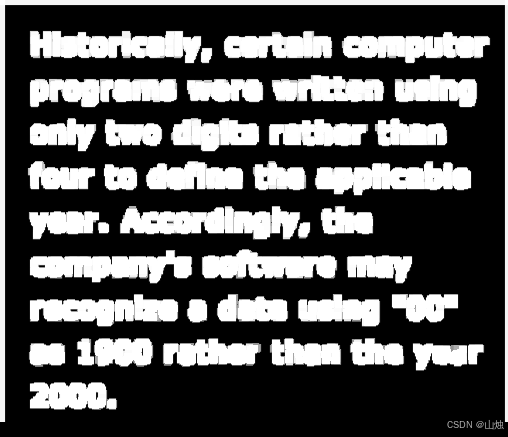
膨胀与腐蚀相反,会使前景物体边界向外扩张。核心逻辑是:用结构元素遍历图像,当结构元素与前景区域有任何重叠(即结构元素至少有一个像素落在前景中)时,就将结构元素中心位置的像素设为前景。
效果:可填补小缝隙、连接断开的物体、增大物体尺寸。
代码实现:
python
# 膨胀函数:cv2.dilate(img, kernel, iteration)
# 参数说明:
# img: 目标图片
# kernel: 操作内核,默认3×3矩阵
# iterations: 膨胀次数,默认1
wenzi = cv2.imread('wenzi.png')
cv2.imshow('src1', wenzi)
cv2.waitKey(0)
kernel = np.ones((4, 4), np.uint8) # 定义4×4结构元素
wenzi_new = cv2.dilate(wenzi, kernel, iterations=2) # 迭代2次膨胀
cv2.imshow('wenzi_new', wenzi_new)
cv2.waitKey(0)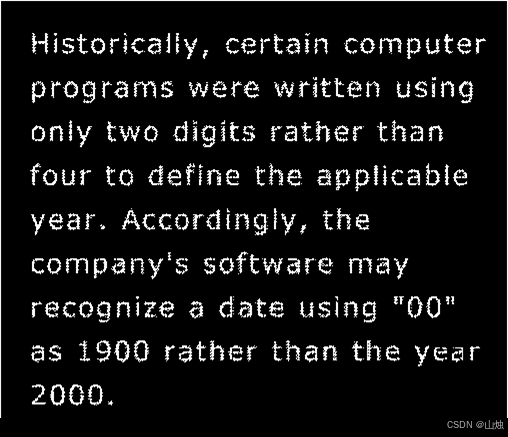 src1
src1
 wenzi_new
wenzi_new
3.开运算与闭运算
- 开运算:先腐蚀后膨胀,用于平滑轮廓、断开窄颈、消除细突起
- 闭运算:先膨胀后腐蚀,用于弥合间断、消除孔洞、填补轮廓断裂
python
# 开运算示例(指纹去噪)
zhiwen = cv2.imread('zhiwen.png')
cv2.imshow('src2', zhiwen)
cv2.waitKey(0)
kernel = np.ones((2, 2), np.uint8) # 2×2结构元素
zhiwen_open = cv2.morphologyEx(zhiwen, cv2.MORPH_OPEN, kernel) # 开运算
cv2.imshow('zhiwen_open', zhiwen_open)
cv2.waitKey(0)
# 闭运算示例(指纹补全)
zhiwen_duan = cv2.imread('zhiwen_duan.png')
cv2.imshow('src3', zhiwen_duan)
cv2.waitKey(0)
kernel = np.ones((4, 4), np.uint8) # 4×4结构元素
zhiwen_close = cv2.morphologyEx(zhiwen_duan, cv2.MORPH_CLOSE, kernel) # 闭运算
cv2.imshow('zhiwen_close', zhiwen_close)
cv2.waitKey(0) src2
src2
 zhiwen_open
zhiwen_open
 src3
src3
 zhiwen_close
zhiwen_close
4.梯度运算
梯度运算 = 膨胀结果 - 腐蚀结果,用于突出图像中强度变化剧烈的区域(提取边缘)。
python
wenzi = cv2.imread('wenzi.png')
cv2.imshow('wenzi_original', wenzi)
cv2.waitKey(0)
kernel = np.ones((2, 2), np.uint8) # 2×2结构元素
# 单独展示膨胀和腐蚀结果
pz_wenzi = cv2.dilate(wenzi, kernel, iterations=1)
cv2.imshow('dilated', pz_wenzi)
cv2.waitKey(0)
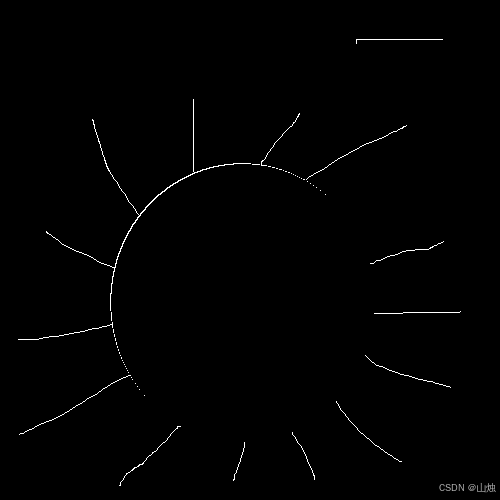
fs_wenzi = cv2.erode(wenzi, kernel, iterations=1)
cv2.imshow('eroded', fs_wenzi)
cv2.waitKey(0)
# 梯度运算提取边缘
bianyuan = cv2.morphologyEx(wenzi, cv2.MORPH_GRADIENT, kernel)
cv2.imshow('edge_gradient', bianyuan)
cv2.waitKey(0) wenzi_original
wenzi_original
 dilated
dilated
 eroded
eroded
 edge_gradient
edge_gradient
5.顶帽和黑帽
- 顶帽:原始图像 - 开运算结果,用于提取图像中比周围亮的细节
- 黑帽:闭运算结果 - 原始图像,用于提取图像中比周围暗的细节
python
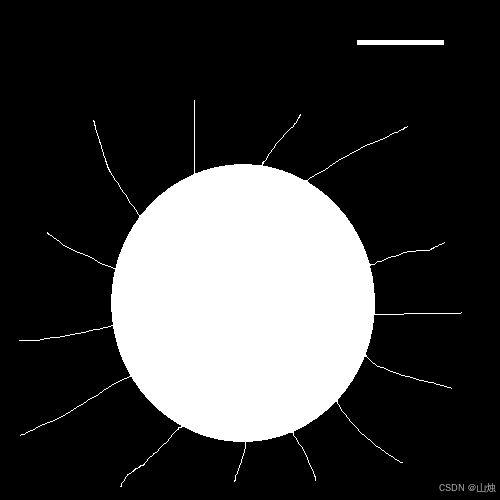
sun = cv2.imread('sun.png')
cv2.imshow('sun_original', sun)
cv2.waitKey(0)
kernel = np.ones((2, 2), np.uint8) # 2×2结构元素
# 开运算结果
open_sun = cv2.morphologyEx(sun, cv2.MORPH_OPEN, kernel)
cv2.imshow('open_sun', open_sun)
cv2.waitKey(0)
# 顶帽运算
tophat = cv2.morphologyEx(sun, cv2.MORPH_TOPHAT, kernel)
cv2.imshow('TOPHAT', tophat)
cv2.waitKey(0)
# 闭运算结果
close_sun = cv2.morphologyEx(sun, cv2.MORPH_CLOSE, kernel)
cv2.imshow('close_sun', close_sun)
cv2.waitKey(0)
# 黑帽运算
blackhat = cv2.morphologyEx(sun, cv2.MORPH_BLACKHAT, kernel)
cv2.imshow('BLACKHAT', blackhat)
cv2.waitKey(0)
cv2.destroyAllWindows()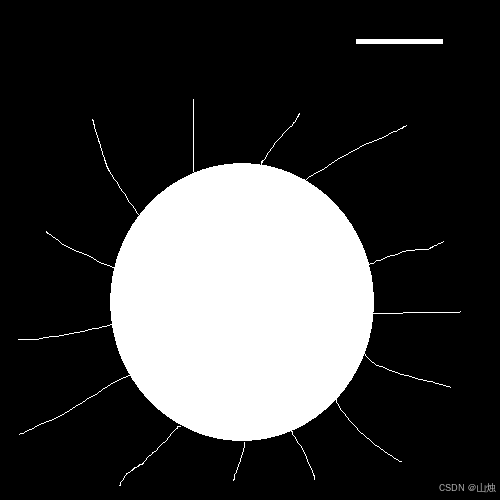 sun_original
sun_original
 open_sun
open_sun
 TOPHAT
TOPHAT
 close_sun
close_sun
 BLACKHAT
BLACKHAT
三、形态学操作的扩展应用与参数调整
1.结构元素的多样化选择
除了代码中使用的矩形结构元素,OpenCV 还支持自定义形状:
python
# 矩形结构元素(默认)
rect_kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5))
# 十字形结构元素(对线性特征敏感)
cross_kernel = cv2.getStructuringElement(cv2.MORPH_CROSS, (5, 5))
# 椭圆形结构元素(平滑处理曲线)
ellipse_kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5, 5))
print("矩形核:\n", rect_kernel)
print("十字核:\n", cross_kernel)
print("椭圆核:\n", ellipse_kernel)
python
矩形核:
[[1 1 1 1 1]
[1 1 1 1 1]
[1 1 1 1 1]
[1 1 1 1 1]
[1 1 1 1 1]]
十字核:
[[0 0 1 0 0]
[0 0 1 0 0]
[1 1 1 1 1]
[0 0 1 0 0]
[0 0 1 0 0]]
椭圆核:
[[0 0 1 0 0]
[1 1 1 1 1]
[1 1 1 1 1]
[1 1 1 1 1]
[0 0 1 0 0]]2.形态学操作的链式应用
组合多种操作处理复杂图像,例如先去噪再提取边缘:
python
def add_peppersalt_noise(image, n=10000):
result = image.copy()
h, w = image.shape[:2] # 获取图片的高和宽
for i in range(n): # 生成n个椒盐噪声
x = np.random.randint(low=1, high=h)
y = np.random.randint(low=1, high=w)
if np.random.randint(low=0, high=2) == 0:
result[x, y] = 0
else:
result[x, y] = 255
return result
noise_image = cv2.imread('../opencv/sun.png')
cv2.imwrite('noise.png', add_peppersalt_noise(noise_image))
# 读取带噪声的图像
noise_img = cv2.imread('noise.png', 0) # 灰度图读取
cv2.imshow('带噪声原图', noise_img)
cv2.imwrite('noise_img.png', noise_img)
cv2.waitKey(0)
# 1. 开运算去噪
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (3, 3))
denoised = cv2.morphologyEx(noise_img, cv2.MORPH_OPEN, kernel)
cv2.imshow('去噪后', denoised)
cv2.imwrite('denoised.png', denoised)
cv2.waitKey(0)
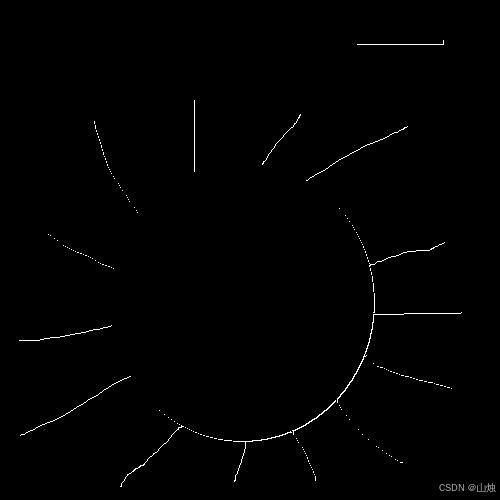
# 2. 梯度运算提取边缘
edge = cv2.morphologyEx(denoised, cv2.MORPH_GRADIENT, kernel)
cv2.imshow('提取的边缘', edge)
cv2.imwrite('edge.png', edge)
cv2.waitKey(0)
cv2.destroyAllWindows()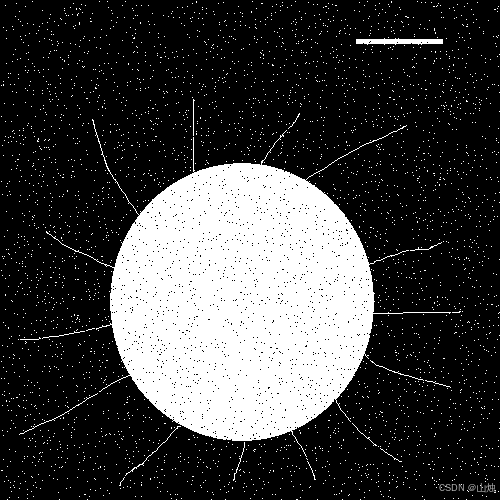 带噪声原图
带噪声原图
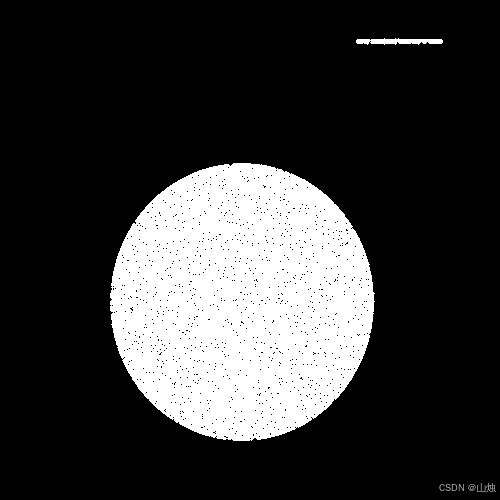 去噪后
去噪后
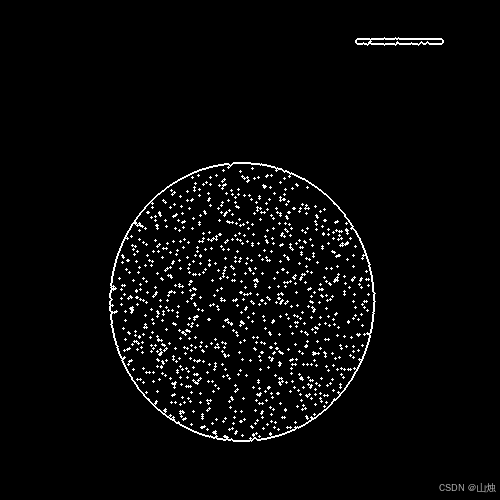 提取的边缘
提取的边缘
3.迭代次数对结果的影响
迭代次数直接影响操作强度:
python
img = cv2.imread('../opencv/sun.png', 0)
kernel = np.ones((3, 3), np.uint8)
# 不同迭代次数的腐蚀效果
erosion_1 = cv2.erode(img, kernel, iterations=1)
erosion_7 = cv2.erode(img, kernel, iterations=7)
erosion_15 = cv2.erode(img, kernel, iterations=15)
cv2.imshow('迭代1次', erosion_1)
cv2.imwrite('erosion1.jpg', erosion_1)
cv2.imshow('迭代7次', erosion_7)
cv2.imwrite('erosion7.jpg', erosion_7)
cv2.imshow('迭代15次', erosion_15)
cv2.imwrite('erosion15.jpg', erosion_15)
cv2.waitKey(0)
cv2.destroyAllWindows() 迭代1次
迭代1次
 迭代7次
迭代7次
 迭代15次
迭代15次
现象:迭代次数越多,前景收缩越明显(腐蚀)或扩张越显著(膨胀)。
4.二值图像与灰度图像的处理差异
- 二值图像(0 和 255):直接改变前景与背景分布,效果最明显
- 灰度图像:基于灰度值操作(腐蚀取最小值,膨胀取最大值)
python
# 灰度图膨胀示例
gray_img = cv2.imread('gray_image.png', 0)
kernel = np.ones((3, 3), np.uint8)
gray_dilate = cv2.dilate(gray_img, kernel, iterations=1)
cv2.imshow('灰度原图', gray_img)
cv2.imshow('灰度膨胀后', gray_dilate)
cv2.waitKey(0)
cv2.destroyAllWindows() 灰度原图
灰度原图
 灰度膨胀后
灰度膨胀后
四、总结与实践建议
- 参数调试:从 3×3 结构元素和 1-5 次迭代开始尝试,避免过度处理
- 场景匹配 :
- 去噪 → 开运算
- 补全轮廓 → 闭运算
- 提取边缘 → 梯度运算
- 提取亮 / 暗细节 → 顶帽 / 黑帽
- 技术结合 :常与阈值分割(
cv2.threshold())配合,先二值化再处理可提升效果