《基于STM32的单相瞬时值反馈逆变器》
整体功能:
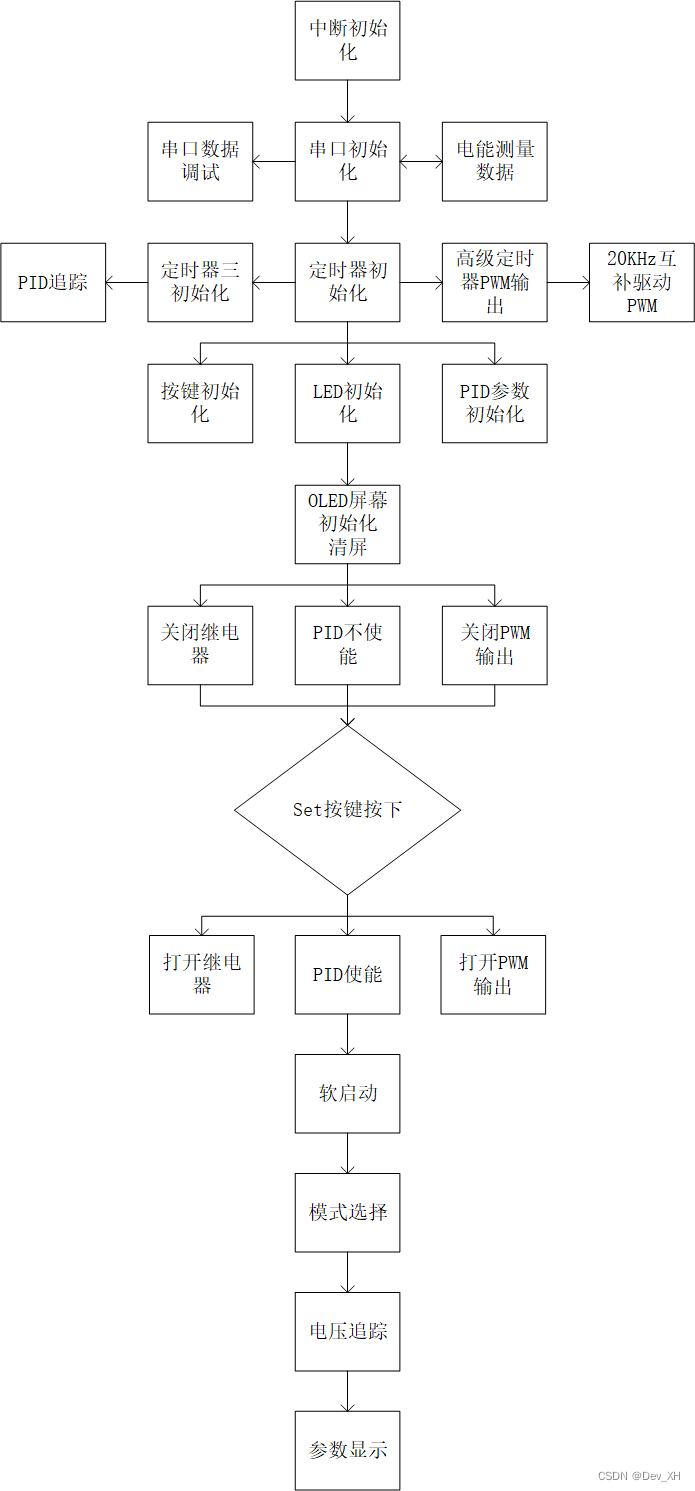
图13 软件框图
如图13所示,由于本设计中需要通过定时器中断执行一些程序,故首先对中断进行初始化。中断初始化以后即为对串口进行初始化,总共初始化了两个串口,第一个串口波特率为9600,主要目的是为了传输数据至串口调试助手用来测试。第二个串口波特率为4800,主要目的是接收电能测量得出的数据,解析电能测量模块传过来的串口数据,采集到交流电压和交流电流信号。串口初始化完成以后紧接着对定时器进行初始化,在本设计中用到了两个定时器。第一个定时器为定时器三,其作用是开启PID追踪,定时器三的中断频率为20KHz,即为50us。设置中断频率为20KHz的原因在于需要以这种频率去改变驱动PWM的占空比,本设计拟采用PWM模拟SPWM的模式,故需要在一个工频周期内产生更多的正弦点,在软件内部使得PWM的占空比以正弦波的形式去变化,一个周期为50Hz即20ms。根据这个关系可算得在一个工频周期内需要模拟出400个正弦波点,其中前200个点代表是正弦波的正半周期,后200个点代表正弦波的负半周期。在定时器三的中断中,定义了一个暂态变量,当暂态变量等于400的时候,也就是一个工频周期过去以后执行一次PID的执行函数,通过PID去追踪一次目标电压。故在1s内可对整个系统进行50次的追踪。定时器一的工作频率也为20KHz,方便进行驱动,在定时器一的初始化函数中对死区进行了设置,并且复用IO口作为互补驱动输出口。
定时器初始化完毕以后对LED,按键进行了初始化。紧接着初始化了PID的参数,PID的参数初始化根据系统的不行进行确认,由于我们用到了PI环,所以对P环的参数和I环的参数都进行了初始化。用到的PID为增量式PID,每次输出的值是在原基础上进行加减,而并不是直接赋值,这样的好处在于有一个追踪爬坡的过程。当初始化完毕以后就对屏幕进行初始化和清屏,同时关闭继电器电源输入,关闭PID,关闭PWM的输出。随后进入初始化界面,当检测到Set按键按下以后,打开继电器,电源能正常输入到单相逆变电路中。同时也使能了PID和打开PWM的输出。由于定时器三早已初始化,PWM模拟SPWM的函数早已开始运行,故此刻逆变电路已经开始工作,不过输出占空比需要乘以一个调制系数才是真正的输出,在设计中设定调制系数越高输出的交流电压幅值就越高,调制系数越低交流电压幅值就越低。软启动的含义在于渐渐增加调制系数,调制系数设定最高为1200,对应正常幅值输出的1.2倍,最低输出100,对应幅值的0.1倍。一般来说驱动MOS管的占空比不能跑满,会带来很大的负荷量。
当软启动以后,电路已经开始正常工作。此时可以通过按键选择工作模式和设定的追踪电压或者追踪功率。当工作模式设定完成以及追踪目标设定完毕后,电路开启PID追踪模式,直到获得追踪的目标电压值。
(1)PWM模拟SPWM算法实现
此算法要与实际电路建立联系,单相逆变电路存在两个对管,电路中电阻两端已经确认了电压的方向,若想要让电阻两端电压从宏观的角度测出来为0V,故需要在这一段时间的负电压和正点压占比相同,比如一半的时间正电压为10V,一半的时间负电压为-10V,这样相互抵消最终测出的电压就为0V。根据这个原理,当占空比为50%的时候,左右对管导通的时间相同,正电压和负电压幅值相同,极性相反,同样时间也相同,故电阻呈现0V。若加大占空比,则正电压占比时间增多,整体就呈现正电压。若减小占空比,则负电压占比时间增多,整体呈现负电压。因此通过控制占空比大于50%或者小于50%就可实现电压正负,并且高出50%越多,正电压越大。按照这个原理,只需要把50%的占空比是为0电位,让占空比按照正弦表的规律去变化,如从50%变化到75%再到50%到25%最终再回到50%,就实现了一个正弦的生成。这个阶段变换的点数越多,交流电压的图像就越平滑,线性度就越好。改变交流电压幅值的方法通过改变大于50%的最大占空比即可实现,需要注意的是,大于50%的最高占空比差值与最小占空差值需一致,这样才能实现上下幅值相等,且以0电位为分割线的作用。

图14 PWM模拟SPWM算法流程
PWM模拟SPWM算法如图14所示。首先确定最高占空比对应的幅值,此处设定100%占空比对应幅值为3600,故50%占空比设置为1800。由于占空比不能弄满,所以我们设定偏离50%占空比25%,即2700。将此数据导入到SPWM表,设定好生成的点数,即可生成一个正弦数组表。在软件内部定义一个400内存的数组,将数组表赋值进去,每隔50us执行一次数组表的功能。以下是设定的PWM控制函数,TIM1是高级定时器一,由于用到的是定时器一的通道一,所以通过此函数驱动。SinData是设定的正弦数表,spwm_count变量每50us增加1,length是设定的数组长度。因此通过这个取余可以每经过一次循环对数组内部的值进行加1移位。减去1800的意思是先把50%占空比弄到0电位,再乘以调制系数,由于调制系数是以1000为单位,故还需除以1000。调整好了以后再加上1800即回到50%占空比。
set_pwm(TIM1,1,(u16)((sinDataspwm_count%length-1800)*duty/1000+1800),3500);
(2)PID功能实现
在本设计之中,PID的作用是追踪特定的输出电压或特定功率。由于输入直流电压恒定,故实现输出交流电压可调需要通过PID实现。PID环节会采集检测到的交流电压信号,交流电压信号送入反馈函数中与目标值做比较。若小于目标电压,则根据小于的比例以及变换的方向进行调节,输出增量,增量的应用对象为调制系数。调制系数越大,输出电压幅值越大,调制系数越小,输出电压幅值越小。
在PID的函数中,需要输入五个变量。格式为PID_X(float now,float target,float kp,float add_limit,float out_limit),其中now为检测到的交流电压,target为设定的目标电压,kp为比例环的调节系数,add_limit代表每一次执行增加的限制,在交流电压和目标电压相差过大时,比例环节会有比较大的差值,故输出的增量也大,需限制增量,否则会让电路迅速波动,容易造成输出紊乱。Out_limit参量含义在于限制住最大输出,前文提到了MOS管如果100%占空比容易损伤器件,故对此进行一个限制,使得最终不能超过特定的占空比,实现安全保护。
以下是PID里面的主要调节参数环节,reaval是当前值,Ek为当前误差,Pout是比例环,比例环的定义为当前的误差乘以比例系数,其中kp可调,增大kp比例差分出来的结果就较大一些,减小则影响小一些。公式完全按照PID的控制方式进行书写,其中I环的公式是根据当前误差与上一次误差的差值进行判断,起到刹车的效果。OUT_Single是三次环节累加的结果,这个参数将加到当前的输出结果上或者减去。对输出也进行了限位,防止最终输出出现过度的情况产生。
pid.reaval=now;//当前值
pid.Ek=target-pid.reaval;//当前误差,指定值减去当前值
pid.Pout=kppid.Ek pid.T/pid.Ti; //P公式
pid.Iout=pid.Kp_I*(pid.Ek-pid.Ek_1);//I公式
pid.Dout=pid.Kp_Dpid.Td (pid.Ek-pid.Ek_1-pid.Ek_1+pid.Ek_2)/pid.T;//D公式
pid.OUT_Single=pid.Pout+pid.Iout+pid.Dout;
if(pid.OUT_Single>add_limit)pid.OUT_Single=add_limit;//限位
else if(pid.OUT_Single<-add_limit)pid.OUT_Single=-add_limit;
OUT+=pid.OUT_Single;
if(OUT>out_limit)OUT=out_limit;//输出限位,限位的范围是300-sum_limit(自行设定)
else if(OUT<100)OUT=100;
pid.Ek_2=pid.Ek_1;//将上次误差赋值给上上次误差
pid.Ek_1=pid.Ek;//将当前误差赋值给上次误差
在TIM3的定时器中,根据当前的mode_status状态进行判断,当mode_status的状态为1的时候,执行电压追踪的作用。当mode_status=2时,实现功率追踪的作用。
if(mode_status1)duty=PID_X(ACVotage*10,AC_Target,kp_v,1,1200);
if(mode_status2)duty=PID_X(ACVotage*7.228,gonglv_Target,kp_p,1,1200);
(3)交流电压电流信号检测
由于与电能测量模块的串口通信协议已经包装好,因此在串口中断函数处已经将数据处理完毕,在主函数while循环内进行数据处理。ACVotage为交流电压的有效值,由于采集会存在着一定的误差,所以要乘以一个校正系数。校正系数的调整方法为先测出交流电压的大小,然后求出显示的交流电压误差,近似相等即可。交流电流的调整方法类似,也是通过系数进行改变。另外也设定了继电器断开的条件,如交流电压超过31V,交流电流超过3A,当累计超过了150ms以后判定为危险状态,从而断开继电器。
ACVotage=(Voltage_Parameter_Reg*1.88/Voltage_Reg)jiaozheng;//电压有效值
if(ACVotage<=2)ACVotage=0;
ACCurrent=(Current_Parameter_Reg 1.0/Current_Reg)*0.4893;//电流有效值
if(ACVotage>31.00f||ACCurrent>3.00f)baojing+=1,delay_ms(50);
else baojing=0;
if(baojing==3)GPIO_ResetBits(GPIOA,GPIO_Pin_0),baojing=0;
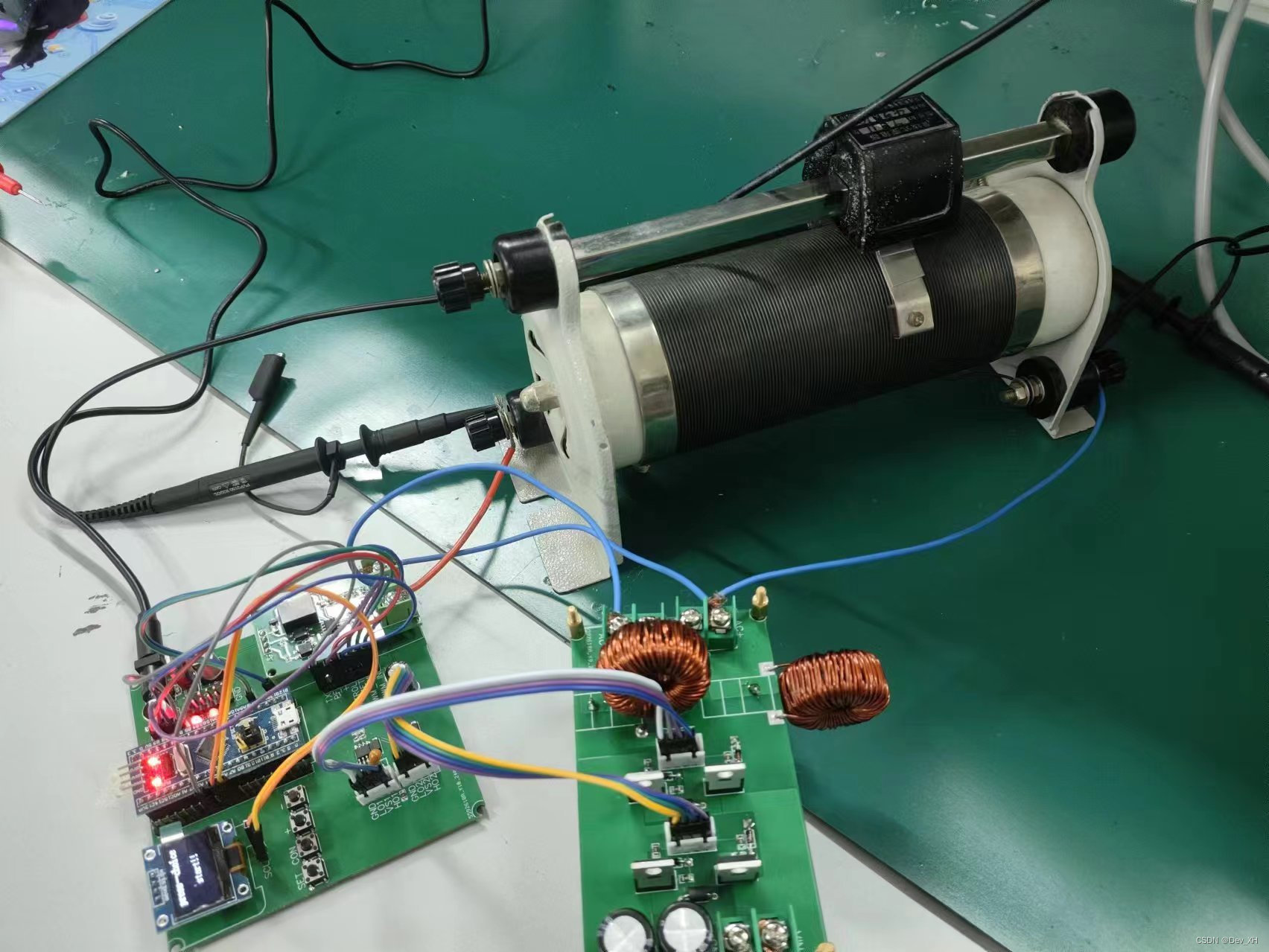
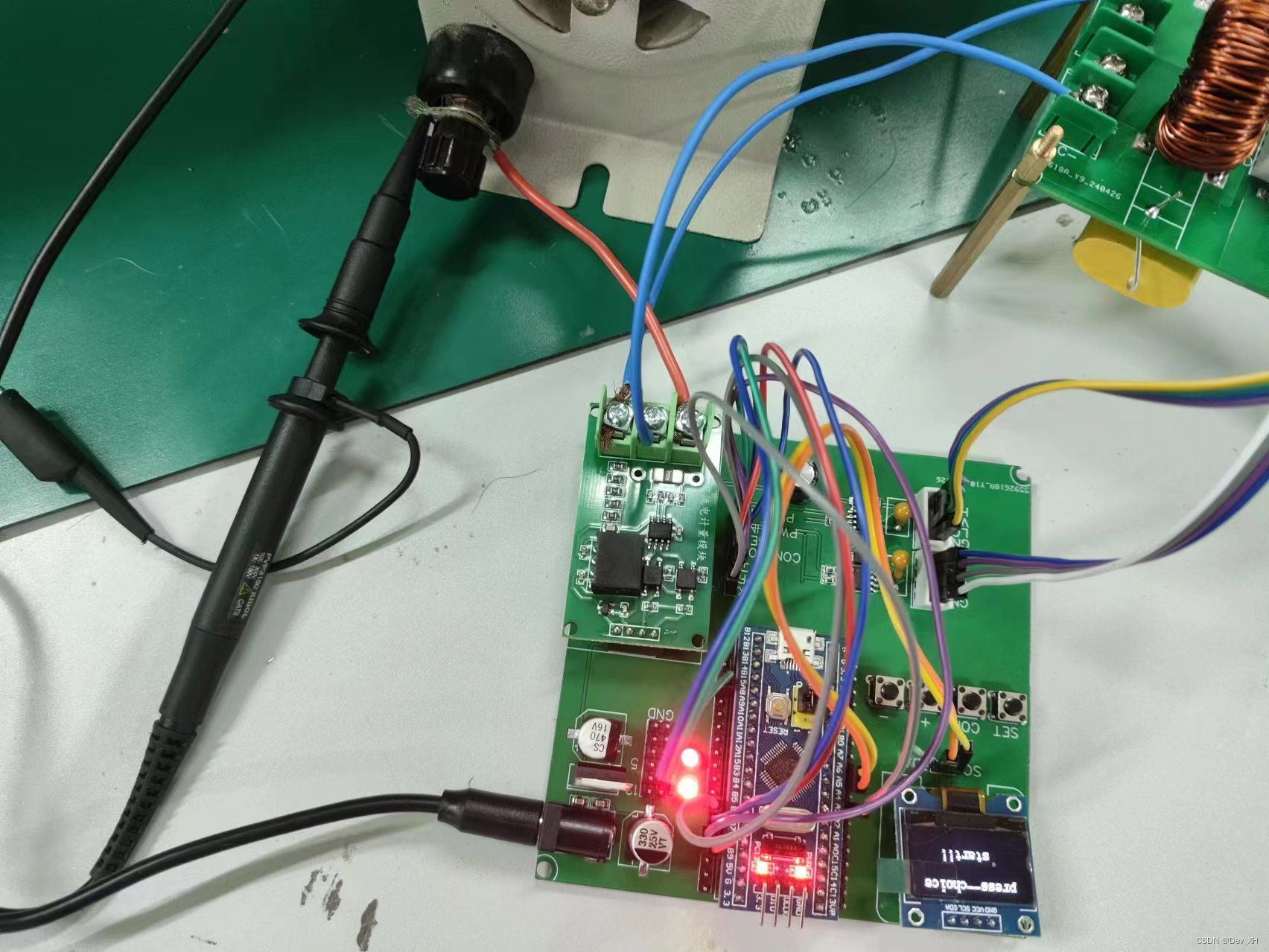
作品展示:

资料详情:
说明:
成品设计不易,详情关注闲鱼店铺:数字梦想家,查看评论区。
