摘要:
本文详细介绍了定速巡航控制是一种车辆驾驶辅助系统,它能让驾驶者在高速或长途驾驶时,设定一个固定的车速,然后车辆会自动维持这个速度行驶,无需驾驶者持续踩油门。这大大减轻了驾驶者的疲劳,同时也提高了行驶的安全性。PID定速巡航控制系统是一种利用比例(Proportional)、积分(Integral)和微分(Derivative)控制算法来实现车辆定速巡航的先进系统。这种系统能够根据设定的速度,自动调整油门开度或制动力度,使车辆保持恒定的速度行驶。
这种控制系统具有响应速度快、控制精度高、稳定性好等优点。通过合理的参数调整,PID定速巡航控制系统可以适应不同的路况和驾驶需求,为驾驶者提供更加舒适和安全的驾驶体验。
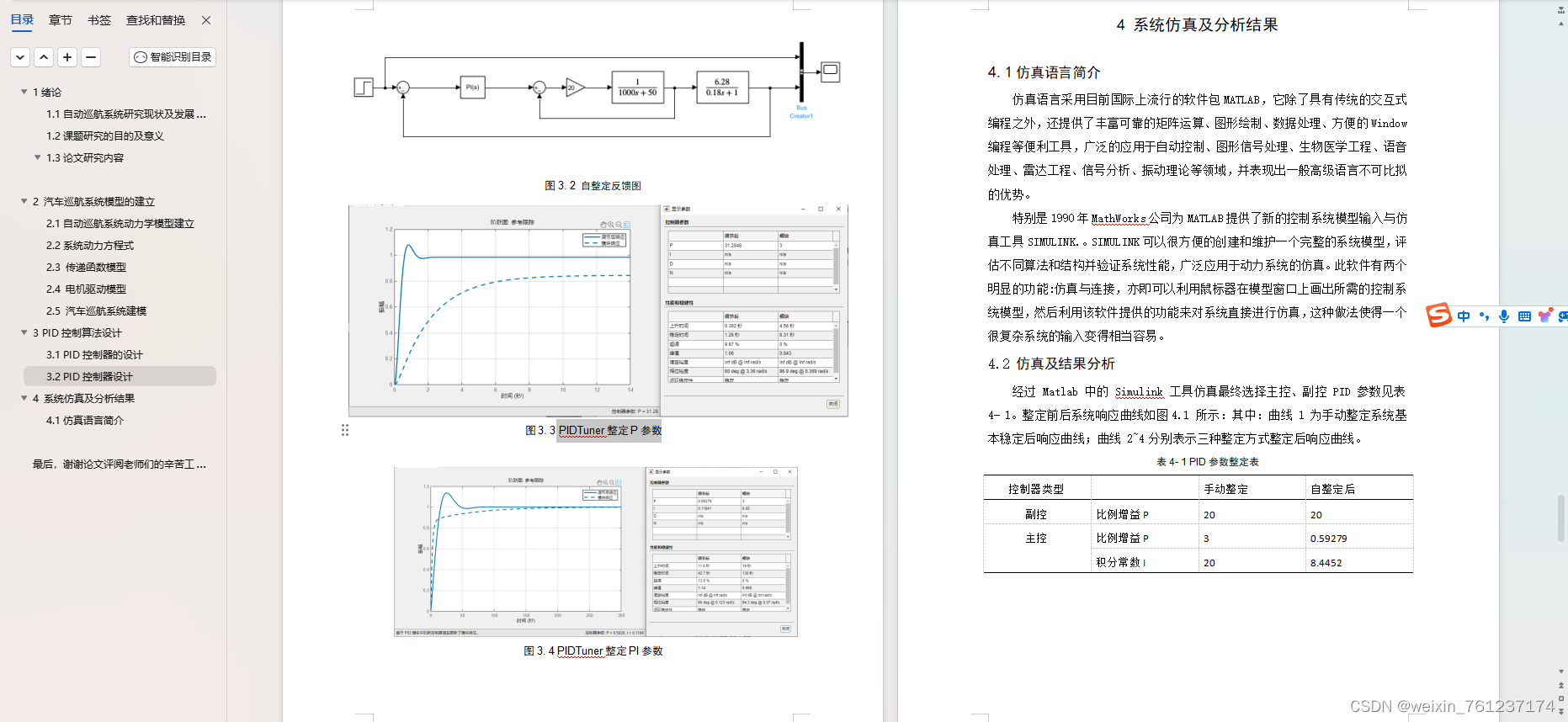
利用 MATLAB/SIMULINK,在已有数学模型基础上,建立了整个系统的PID控制器。构建起了整个仿真系统,调整了各个仿真模块的参数,仿真结果较为合理。
关键词:PID控制;定速巡航控制;仿真;
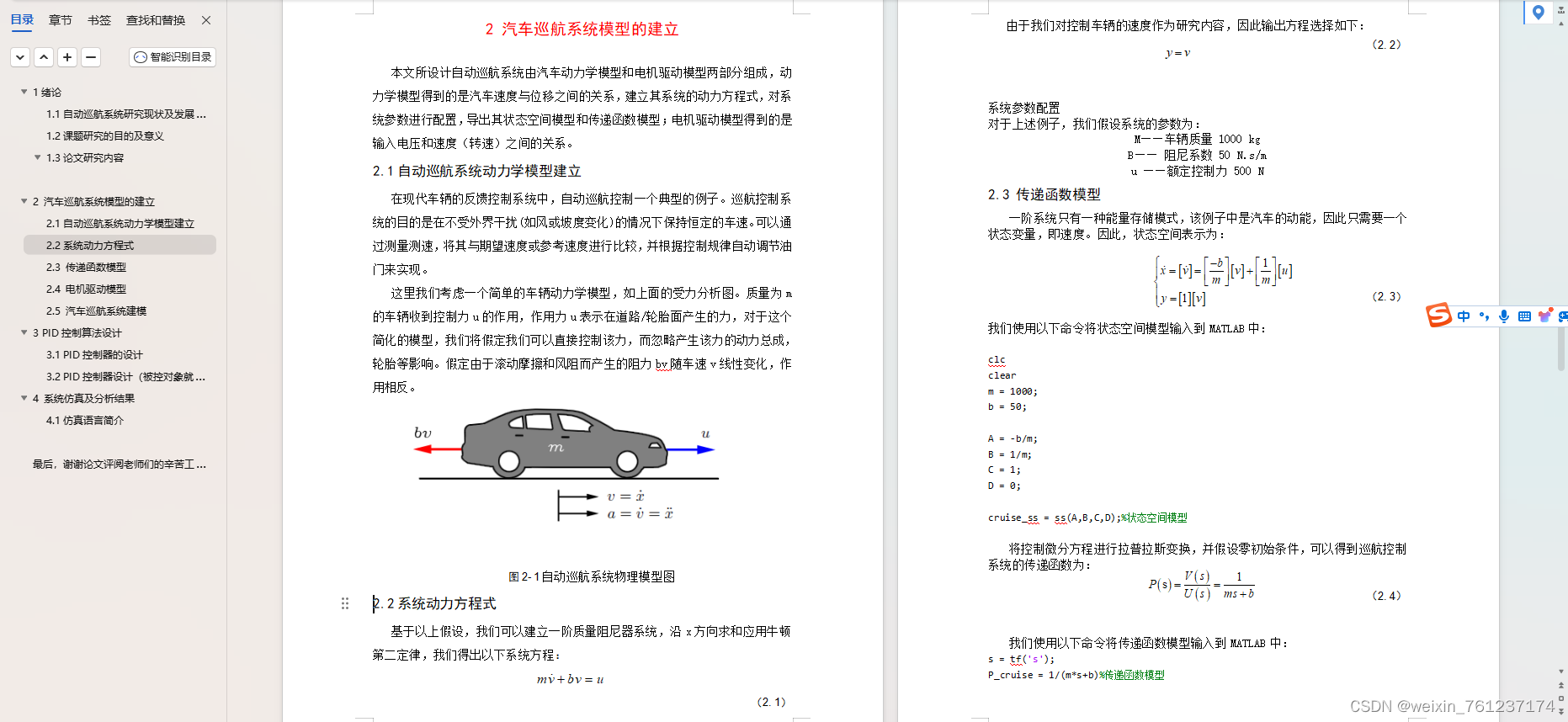
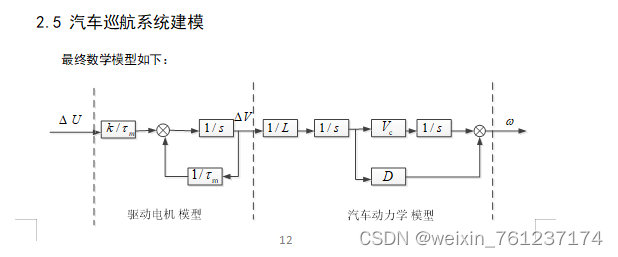
动力学模型---定速巡航系统---数学建模
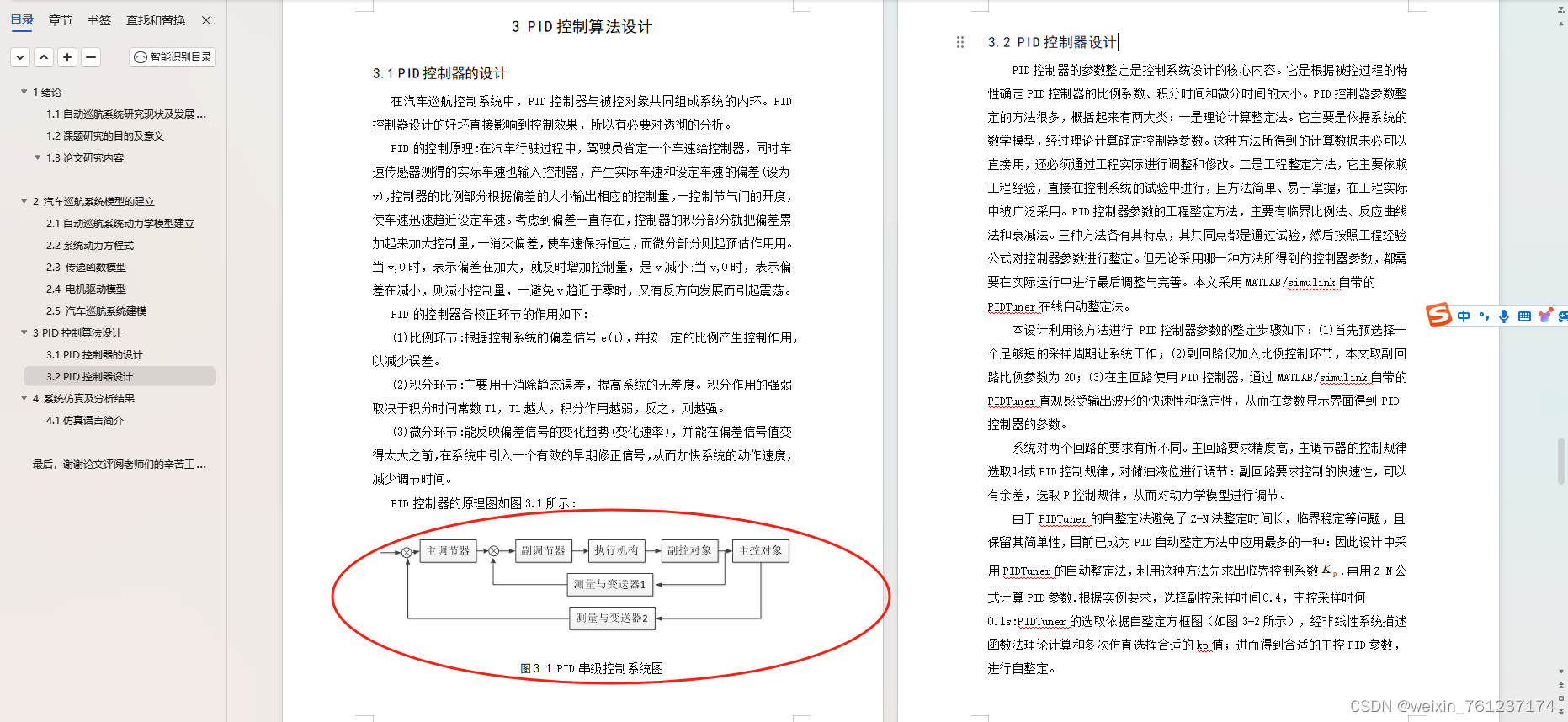
串级PID控制策略
PIDTuner参数自动整定