导论:
双高斯照相物镜的设计思想,当β=-1时,由于其对称,彗差、畸变和倍率色差自动校正为0,利用中间两块厚透镜可以校正场曲,选取合适的光阑位置可以校正像散,在厚透镜中加胶合面使每个半部校正位置色差,并应用厚、薄透镜互相补偿球差。这样从初级像差理论来看,双高斯照相物镜可以校正所有像差。
照相物镜多对无限远物体校正像差,在结构上虽然保持对称,但具体结构参数(r,d,n)则需适当偏离于对称,以补偿β≠-1所引起的像差。
设计一个双高斯物镜,其光学特性要求为焦距55mm,视场角2ω=40度,入瞳直径26mm。
设计流程:
原始系统确定:
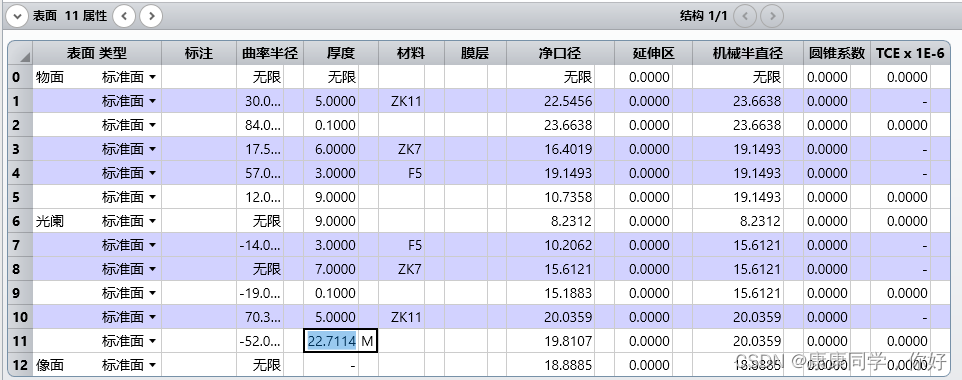
我们直接查找一个现有结构作为原始系统:
|--------------|-----|------|
| r | d | 玻璃 |
| 30 | 5 | ZK11 |
| 84 | 0.1 | |
| 17.5 | 6 | ZK7 |
| 57 | 3 | F5 |
| 12 | 9 | |
| infinity(光阑) | 9 | |
| -14 | 3 | F5 |
| infinity | 7 | ZK7 |
| -19 | 0.1 | |
| 70.3 | 5 | ZK11 |
| -52 | | |
ZEMAX设计与优化:
系统建模:
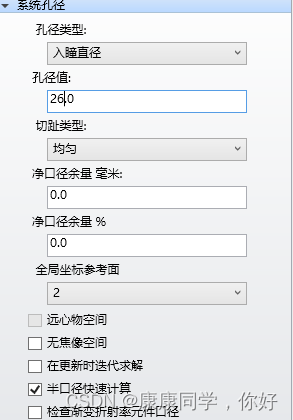
首先输入系统特性参数,如下:
在系统孔径中选择入瞳直径,并根据设计要求输入26。
在波长设定对话框中,选择F,d,C自动加入三个波长。
在视场设定对话框中设置3个视场(0 0.7 1视场),要选择角度,如下图:

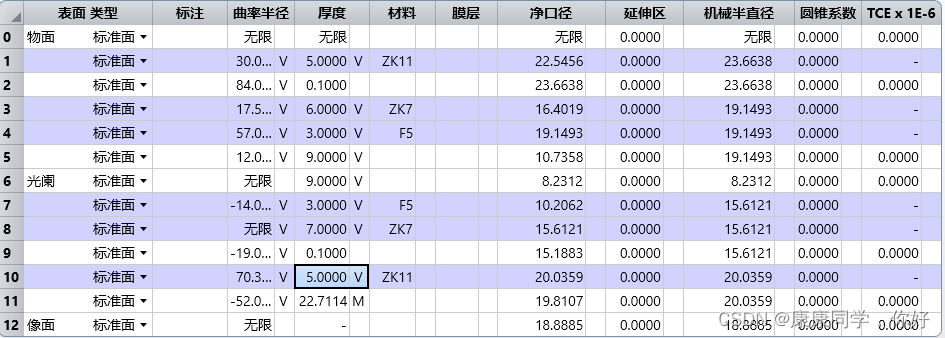
在镜头数据编辑器中输入查找出来的初始结构,如下图。
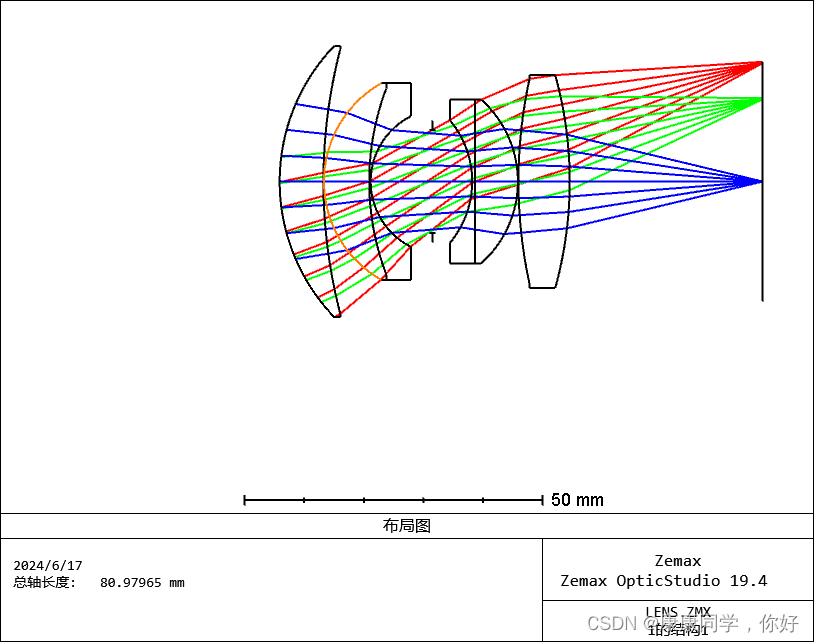
观察系统的二维结构图,如下图:
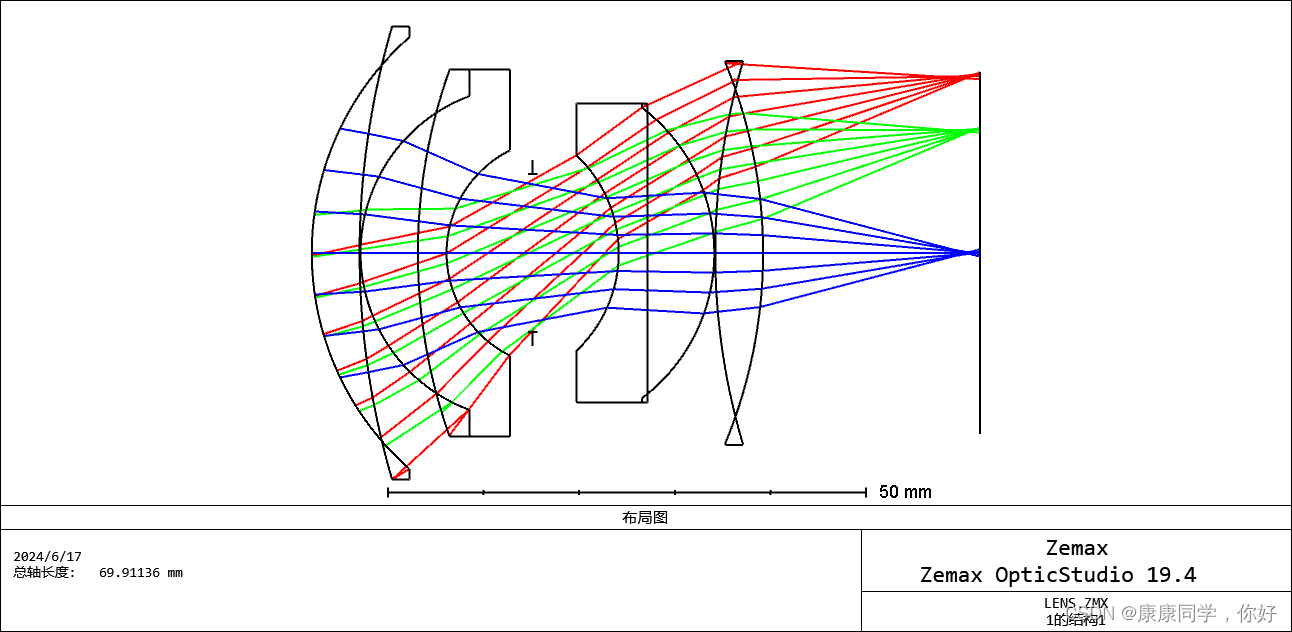
结构图有些异常,需要优化设计。
系统优化
首先建立评价函数。
打开评价函数编辑器,选择优化设置导向。如下图:
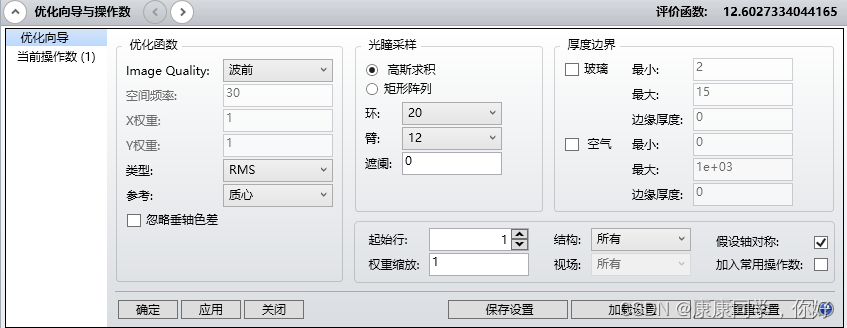 点击应用,系统已经根据上述设置自动生成一系列控制像差的操作数。
点击应用,系统已经根据上述设置自动生成一系列控制像差的操作数。
增加EFFL操作数,控制透镜的最小中心厚度,权重为1。
增加MNET操作数,控制透镜的最小边缘厚度,权重为1。
如下图所示:

返回镜头数据编辑器,为系统设置变量。将10个球面的曲率和所有透镜厚度(除两个微小的空气间隔0.1以外)都设置为变量,如下图所示:
点击优化按钮执行优化。
优化后系统的二维结构图,如下图:
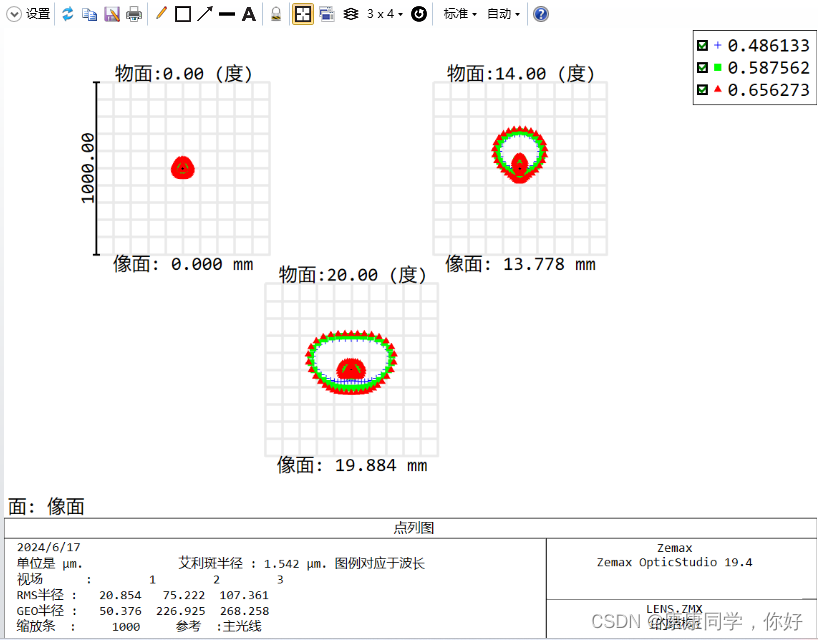
查看优化后的点列图,如下图:
查看优化后的MTF,如下图:
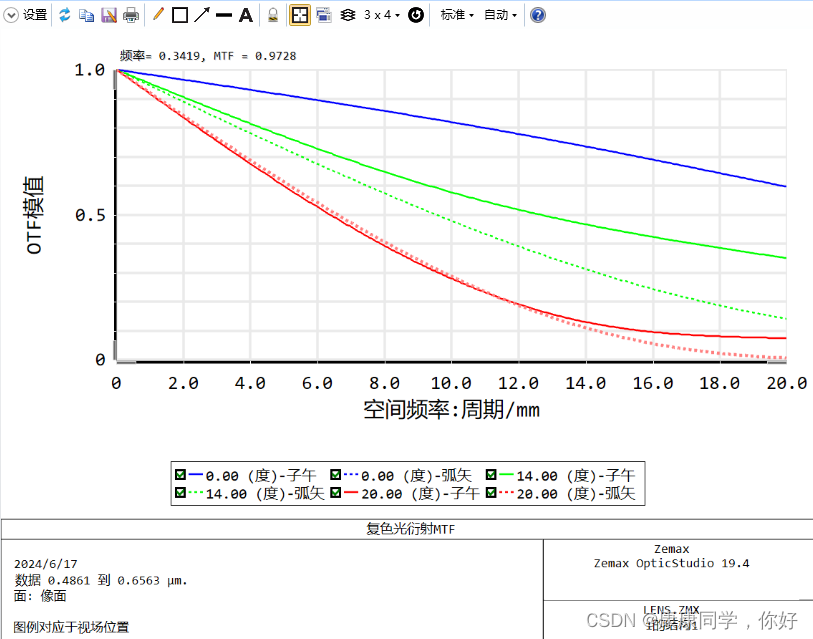
从MTF图中看出,经过优化后,系统点列图半径虽然有所减小,但MTF反应像质仍有点差。