++本篇博客为 上篇博客的 另一个实现版本,训练流程相同,所以只实现代码,感兴趣可以跳转看一下。++
生成对抗网络---GAN(代码+理解)
目录
[1. 模型结构](#1. 模型结构)
[2. 代码实现](#2. 代码实现)
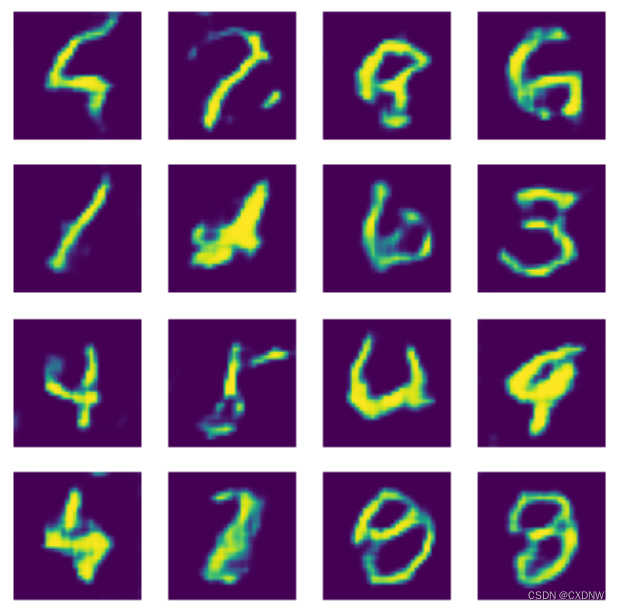
[3. 运行结果展示](#3. 运行结果展示)
[1. 模型初始化](#1. 模型初始化)
[2. 模型训练时](#2. 模型训练时)
[3. 优化器定义](#3. 优化器定义)
[4. 训练数据](#4. 训练数据)
[5. 模型结构](#5. 模型结构)
一、GAN深度卷积实现
1. 模型结构
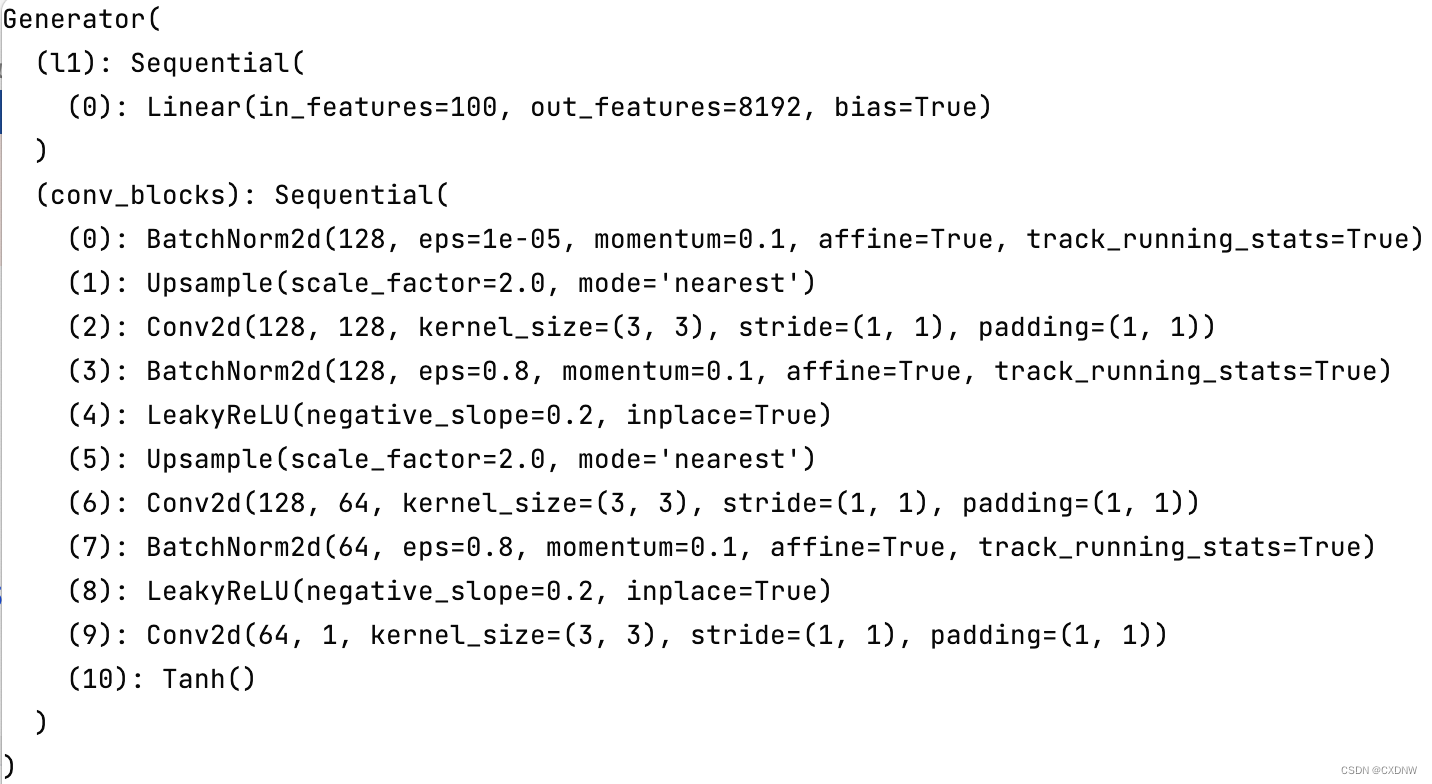
(1)生成器(Generator)
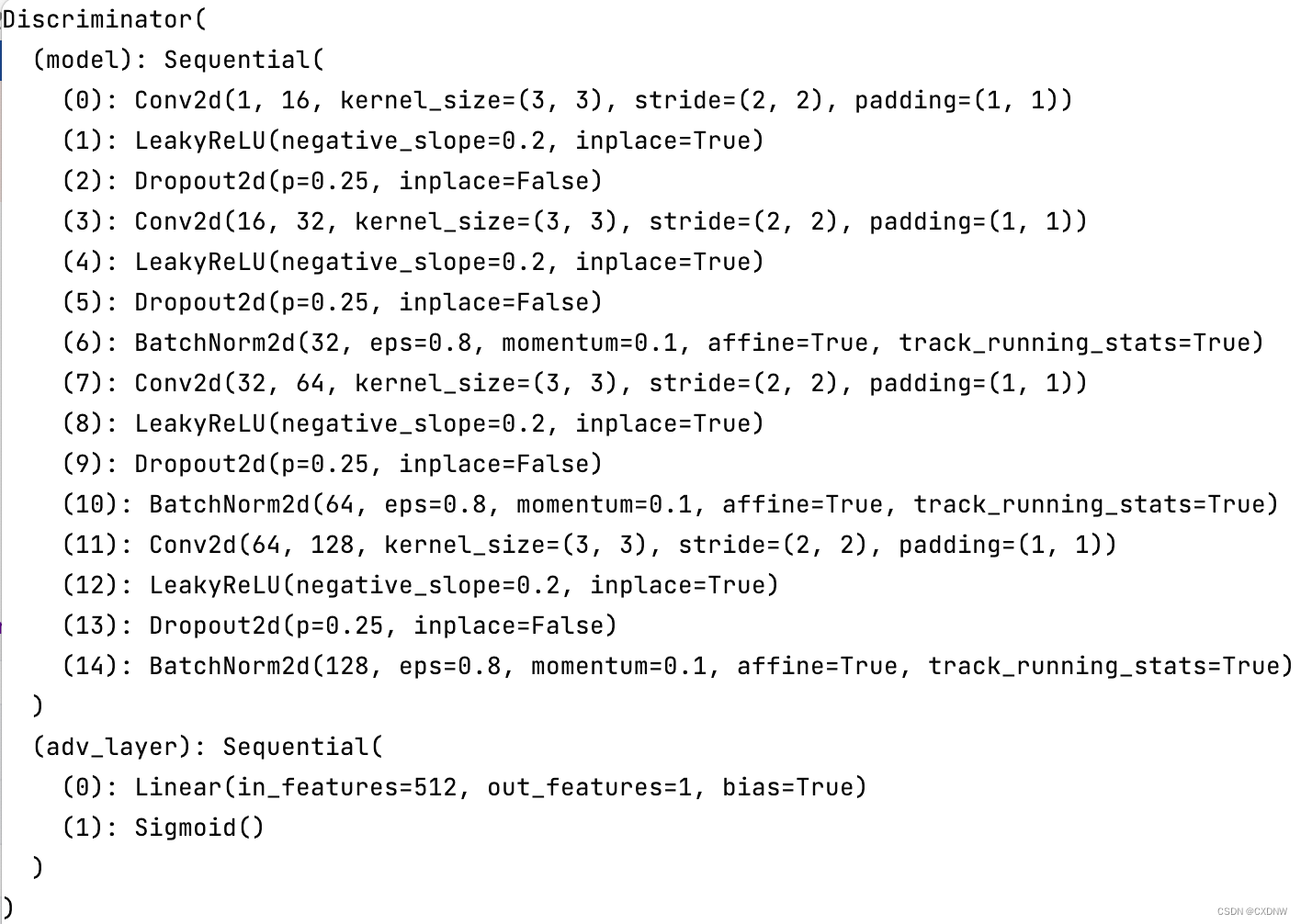
(2)判别器(Discriminator)
2. 代码实现
python
import torch
import torch.nn as nn
import argparse
import torchvision.transforms as transforms
import matplotlib.pyplot as plt
from torch.utils.data import DataLoader
from torchvision import datasets
import numpy as np
parser = argparse.ArgumentParser()
parser.add_argument("--n_epochs", type=int, default=20, help="number of epochs of training")
parser.add_argument("--batch_size", type=int, default=64, help="size of the batches")
parser.add_argument("--lr", type=float, default=0.0002, help="adam: learning rate")
parser.add_argument("--b1", type=float, default=0.5, help="adam: decay of first order momentum of gradient")
parser.add_argument("--b2", type=float, default=0.999, help="adam: decay of first order momentum of gradient")
parser.add_argument("--latent_dim", type=int, default=100, help="dimensionality of the latent space")
parser.add_argument("--img_size", type=int, default=32, help="size of each image dimension")
parser.add_argument("--channels", type=int, default=1, help="number of image channels")
parser.add_argument("--sample_interval", type=int, default=400, help="interval between image sampling")
opt = parser.parse_args()
print(opt)
# 加载数据
dataloader = torch.utils.data.DataLoader(
datasets.MNIST(
"./others/",
train=False,
download=False,
transform=transforms.Compose(
[transforms.Resize(opt.img_size), transforms.ToTensor(), transforms.Normalize([0.5], [0.5])]
),
),
batch_size=opt.batch_size,
shuffle=True,
)
def weights_init_normal(m):
classname = m.__class__.__name__
if classname.find("Conv") != -1:
torch.nn.init.normal_(m.weight.data, 0.0, 0.02)
elif classname.find("BatchNorm2d") != -1:
torch.nn.init.normal_(m.weight.data, 1.0, 0.02) # 给定均值和标准差的正态分布N(mean,std)中生成值
torch.nn.init.constant_(m.bias.data, 0.0)
class Generator(nn.Module):
def __init__(self):
super(Generator, self).__init__()
self.init_size = opt.img_size // 4 # 原为28*28,现为32*32,两边各多了2
self.l1 = nn.Sequential(nn.Linear(opt.latent_dim, 128 * self.init_size ** 2))
self.conv_blocks = nn.Sequential(
nn.BatchNorm2d(128), # 调整数据的分布,使其 更适合于 下一层的 激活函数或学习
nn.Upsample(scale_factor=2),
nn.Conv2d(128, 128, 3, stride=1, padding=1),
nn.BatchNorm2d(128, 0.8),
nn.LeakyReLU(0.2, inplace=True),
nn.Upsample(scale_factor=2),
nn.Conv2d(128, 64, 3, stride=1, padding=1),
nn.BatchNorm2d(64, 0.8),
nn.LeakyReLU(0.2, inplace=True),
nn.Conv2d(64, opt.channels, 3, stride=1, padding=1),
nn.Tanh(),
)
def forward(self, z):
out = self.l1(z)
out = out.view(out.shape[0], 128, self.init_size, self.init_size)
img = self.conv_blocks(out)
return img
class Discriminator(nn.Module):
def __init__(self):
super(Discriminator, self).__init__()
def discriminator_block(in_filters, out_filters, bn=True):
block = [nn.Conv2d(in_filters, out_filters, 3, 2, 1),
nn.LeakyReLU(0.2, inplace=True),
nn.Dropout2d(0.25)]
if bn:
block.append(nn.BatchNorm2d(out_filters, 0.8))
return block
self.model = nn.Sequential(
*discriminator_block(opt.channels, 16, bn=False),
*discriminator_block(16, 32),
*discriminator_block(32, 64),
*discriminator_block(64, 128),
)
# 下采样(图片进行 4次卷积操作,变为ds_size * ds_size尺寸大小)
ds_size = opt.img_size // 2 ** 4
self.adv_layer = nn.Sequential(
nn.Linear(128 * ds_size ** 2, 1),
nn.Sigmoid()
)
def forward(self, img):
out = self.model(img)
out = out.view(out.shape[0], -1)
validity = self.adv_layer(out)
return validity
# 实例化
generator = Generator()
discriminator = Discriminator()
# 初始化参数
generator.apply(weights_init_normal)
discriminator.apply(weights_init_normal)
# 优化器
optimizer_G = torch.optim.Adam(generator.parameters(), lr=opt.lr, betas=(opt.b1, opt.b2))
optimizer_D = torch.optim.Adam(discriminator.parameters(), lr=opt.lr, betas=(opt.b1, opt.b2))
# 交叉熵损失函数
adversarial_loss = torch.nn.BCELoss()
def gen_img_plot(model, epoch, text_input):
prediction = np.squeeze(model(text_input).detach().cpu().numpy()[:16])
plt.figure(figsize=(4, 4))
for i in range(16):
plt.subplot(4, 4, i + 1)
plt.imshow((prediction[i] + 1) / 2)
plt.axis('off')
plt.show()
# ----------
# Training
# ----------
D_loss_ = [] # 记录训练过程中判别器的损失
G_loss_ = [] # 记录训练过程中生成器的损失
for epoch in range(opt.n_epochs):
# 初始化损失值
D_epoch_loss = 0
G_epoch_loss = 0
count = len(dataloader) # 返回批次数
for i, (imgs, _) in enumerate(dataloader):
valid = torch.ones(imgs.shape[0], 1)
fake = torch.zeros(imgs.shape[0], 1)
# -----------------
# Train Generator
# -----------------
optimizer_G.zero_grad()
z = torch.randn(imgs.shape[0], opt.latent_dim)
gen_imgs = generator(z)
g_loss = adversarial_loss(discriminator(gen_imgs), valid)
g_loss.backward()
optimizer_G.step()
# ---------------------
# Train Discriminator
# ---------------------
optimizer_D.zero_grad()
real_loss = adversarial_loss(discriminator(imgs), valid)
fake_loss = adversarial_loss(discriminator(gen_imgs.detach()), fake)
d_loss = (real_loss + fake_loss) / 2
d_loss.backward()
optimizer_D.step()
print(
"[Epoch %d/%d] [Batch %d/%d] [D loss: %f] [G loss: %f]"
% (epoch, opt.n_epochs, i, len(dataloader), d_loss.item(), g_loss.item())
)
# batches_done = epoch * len(dataloader) + i
# if batches_done % opt.sample_interval == 0:
# save_image(gen_imgs.data[:25], "others/images/%d.png" % batches_done, nrow=5, normalize=True)
# 累计每一个批次的loss
with torch.no_grad():
D_epoch_loss += d_loss
G_epoch_loss += g_loss
# 求平均损失
with torch.no_grad():
D_epoch_loss /= count
G_epoch_loss /= count
D_loss_.append(D_epoch_loss.item())
G_loss_.append(G_epoch_loss.item())
text_input = torch.randn(opt.batch_size, opt.latent_dim)
gen_img_plot(generator, epoch, text_input)
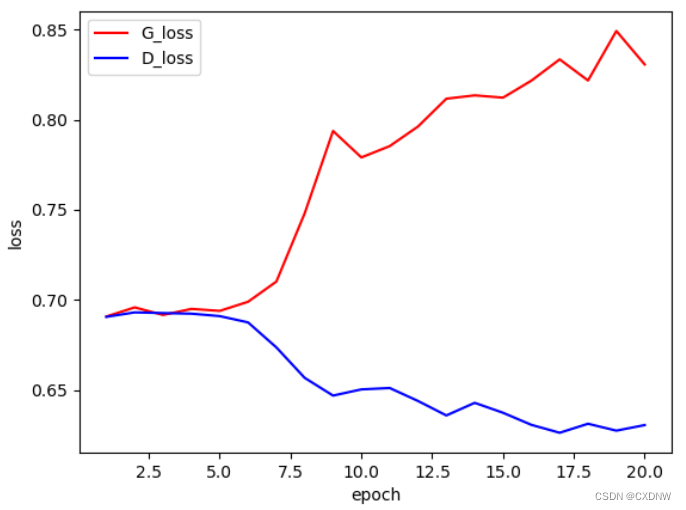
x = [epoch + 1 for epoch in range(opt.n_epochs)]
plt.figure()
plt.plot(x, G_loss_, 'r')
plt.plot(x, D_loss_, 'b')
plt.ylabel('loss')
plt.xlabel('epoch')
plt.legend(['G_loss','D_loss'])
plt.show()3. 运行结果展示
二、学习中产生的疑问,及文心一言回答
1. 模型初始化
函数 weights_init_normal 用于初始化 模型参数,为什么要 以 均值和标准差 的正态分布中采样的数 为标准?
2. 模型训练时
这里"d_loss = (real_loss + fake_loss) / 2" 中的 "/ 2" 操作,在 实际训练中 有什么作用?
由(real_loss + fake_loss) / 2的 得到 的 d_loss 与(real_loss+fake_loss)得到的 d_loss 进行 回溯,两者结果会 有什么不同吗?
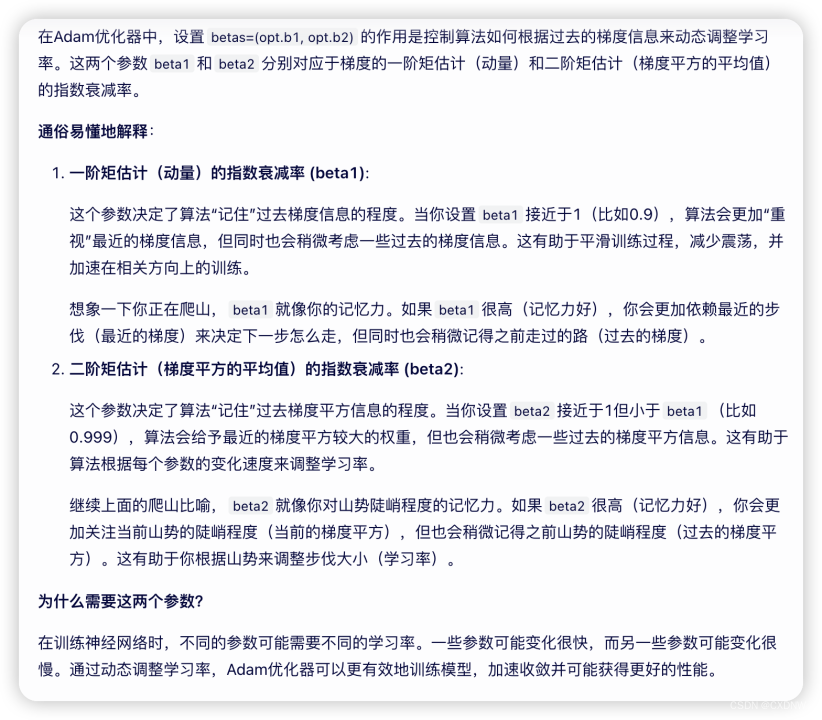
3. 优化器定义
设置 betas=(opt.b1, opt.b2) 有什么 实际的作用?通俗易懂的讲一下
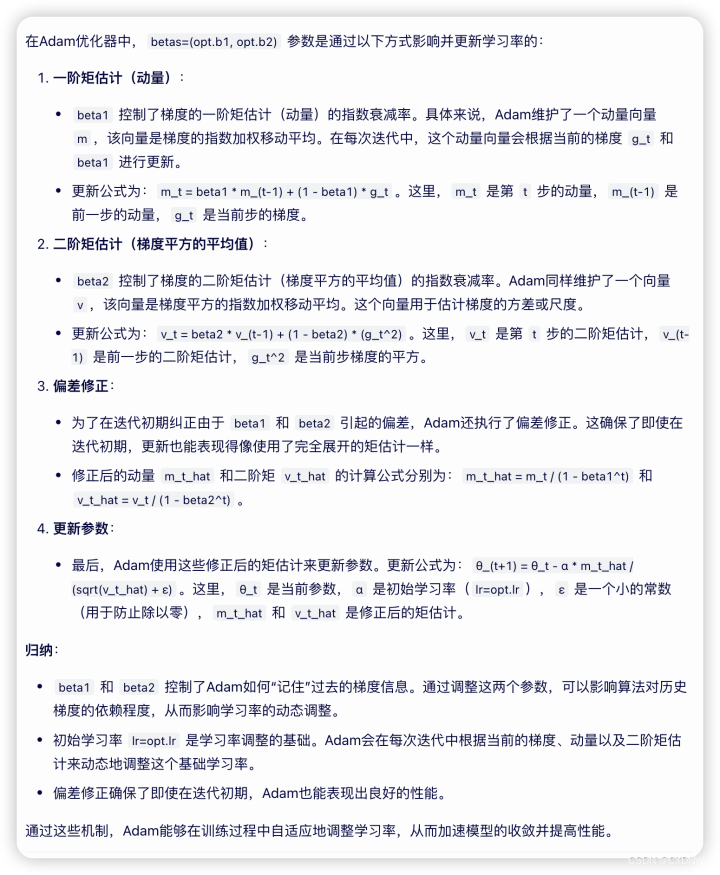
betas=(opt.b1, opt.b2) 是怎样 更新学习率的?
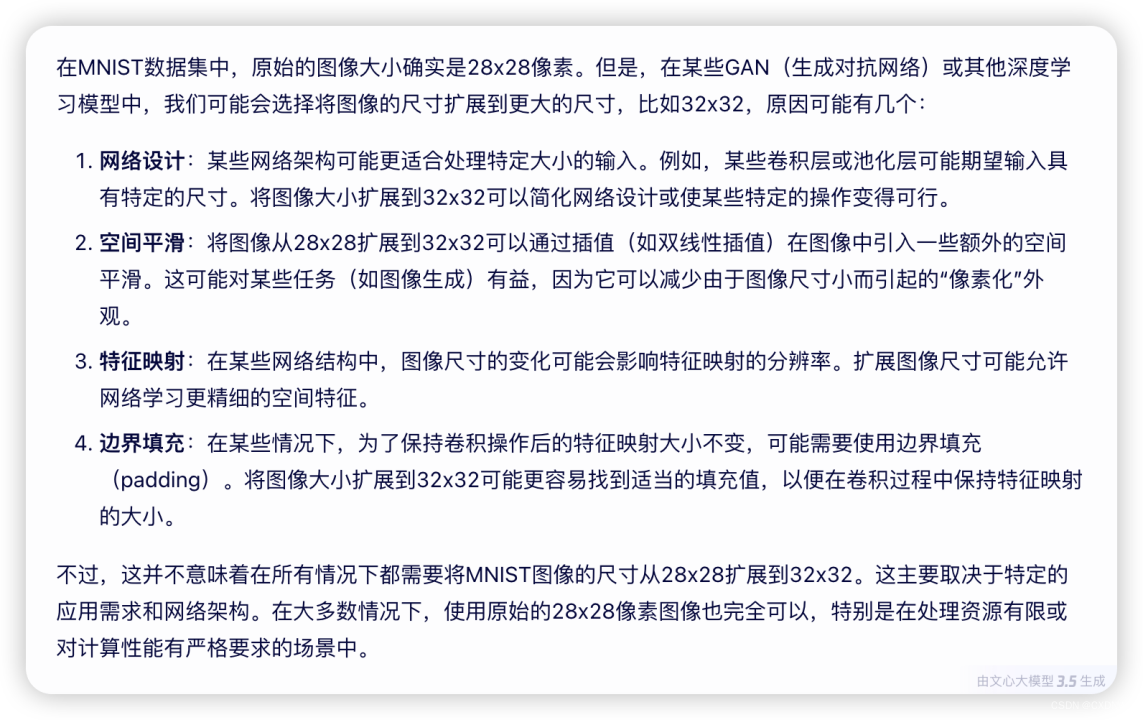
4. 训练数据
这里我们用的data为 MNIST,为什么img_size设置为 32,不是 28?
5. 模型结构
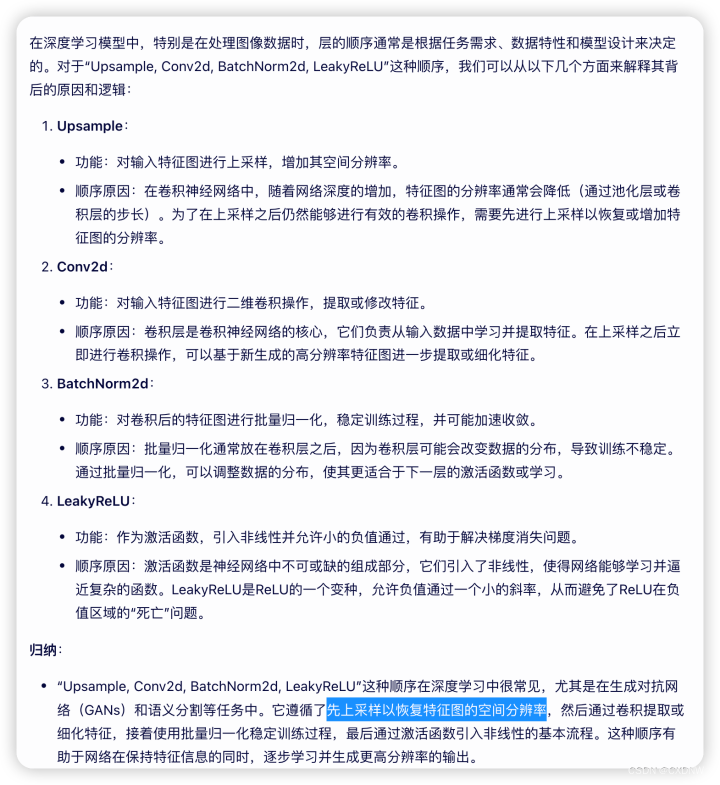
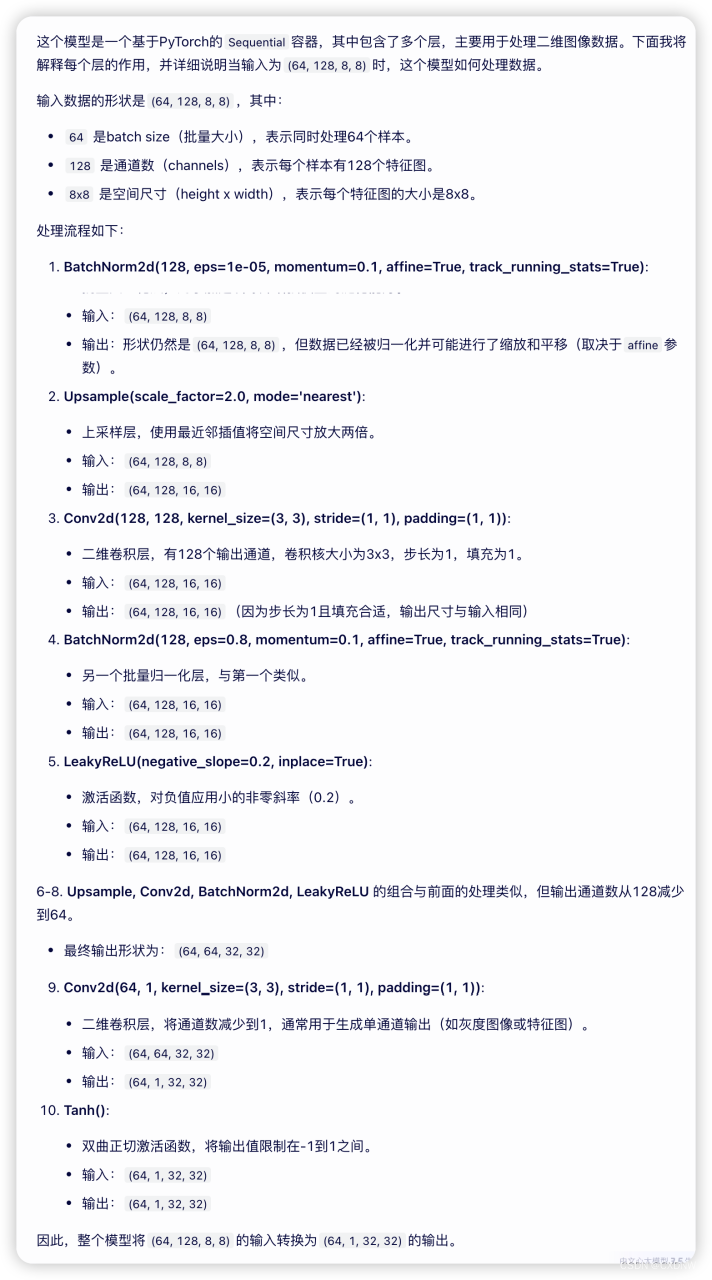
(1)生成器
解释一下为什么是"Upsample, Conv2d, BatchNorm2d, LeakyReLU "这种顺序?
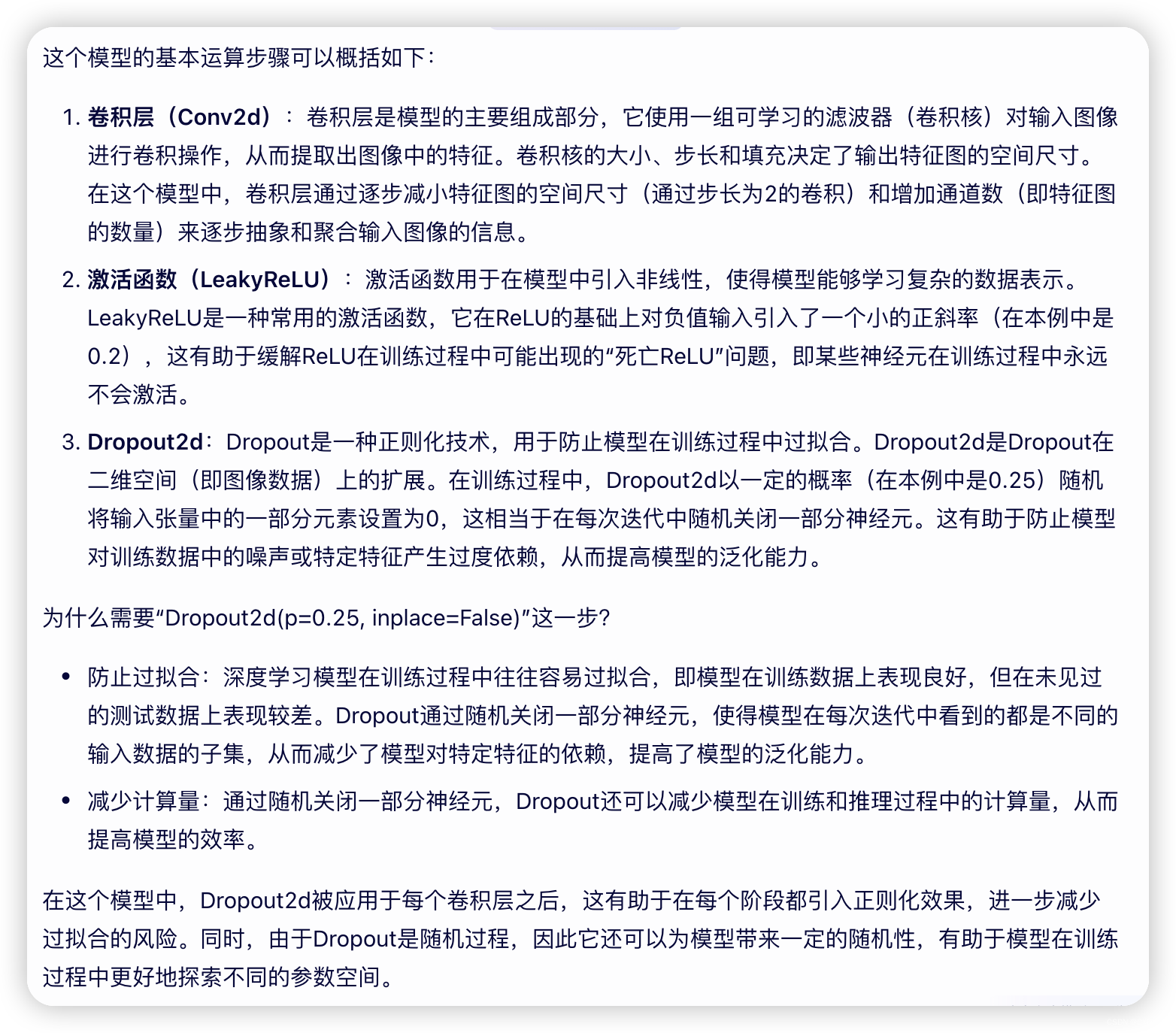
(2)判别器
模型的 基本 运算步骤是什么?其中为什么需要 "Dropout2d( p=0.25, inplace=False)"这一步?
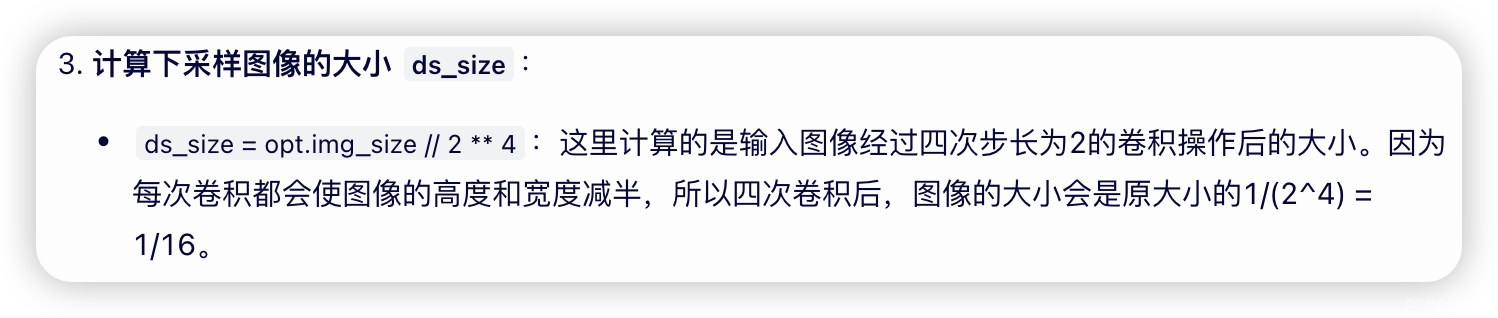
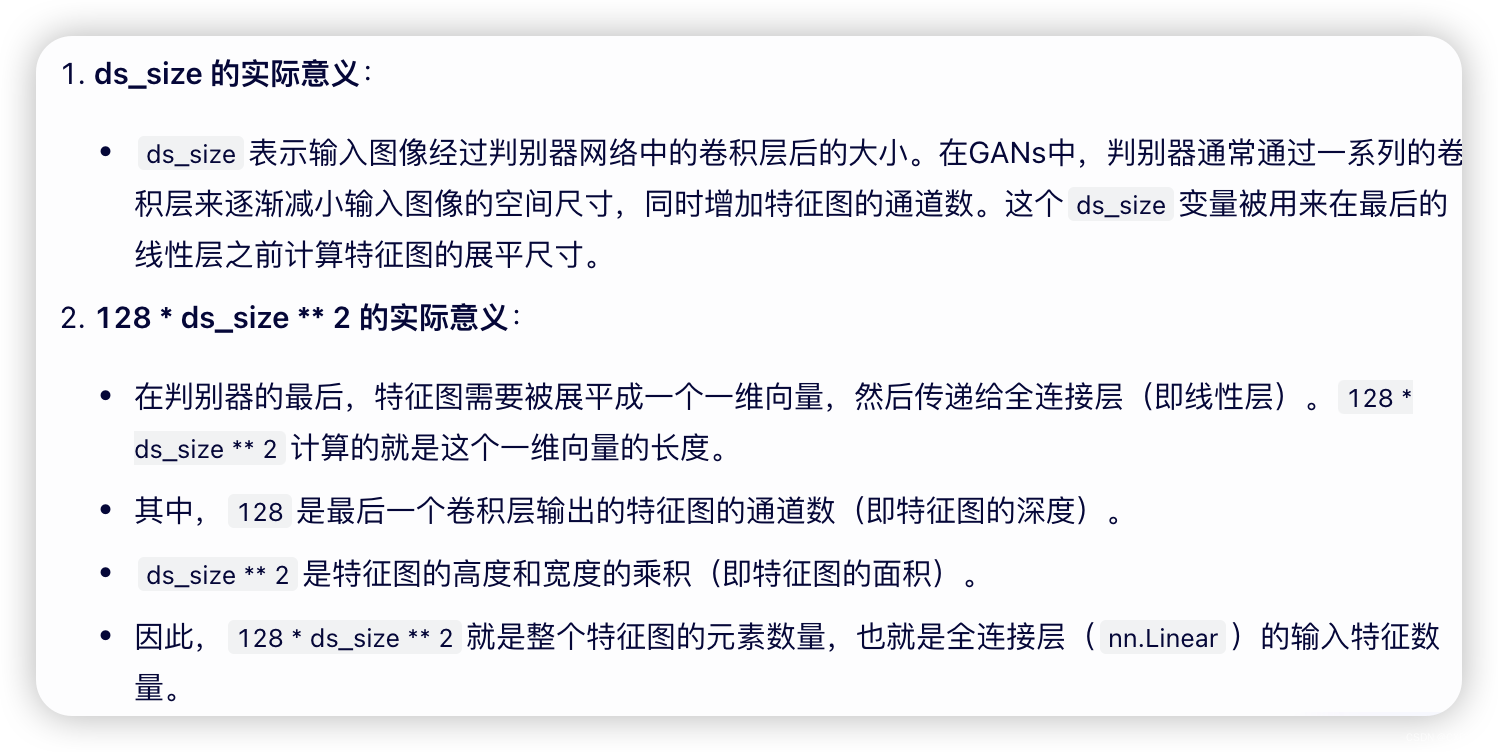
关于"ds_size" 和 "128 * ds_size ** 2"的实际意义?
后续更新 GAN的其他模型结构。