1、单目相机标定流程及步骤
单目相机标定是通过确定相机的内部和外部参数,以便准确地在图像空间和物体空间之间建立映射关系。下面是单目相机标定的流程及步骤:
- **搜集标定图像:**使用不同角度、距离和姿态拍摄一组标定图像,并确保标定板(可以是棋盘格或者圆形标定板)完整可见。
- **提取标定板角点:**使用相机标定软件或者编程工具,对标定图像进行处理,提取出标定板上的角点位置。
- **生成标定板坐标系:**将标定板的实际尺寸和布置方式输入到标定软件中,生成标定板的物体坐标系。
- **相机标定:**使用标定板提取的角点位置和物体坐标系的信息,计算相机的内部参数(焦距、主点位置)和外部参数(旋转矩阵、平移向量)。
- **评估标定结果:**通过重投影误差等指标评估相机标定的准确性,可以进行误差分析和加以改进。
- 应用标定参数:将标定得到的相机参数应用到实际场景中,用于目标检测、测距、摄像头校正等应用。
通过以上流程和步骤,可以有效地对单目相机进行标定,提高图像处理和计算机视觉的准确性和可靠性。
2、张正友标定法原理
张正友标定法(Zhang's Camera Calibration Method)是一种常用的相机标定方法,通过使用棋盘格标定板进行相机标定,得到相机的内部和外部参数。该方法由姚林德和张正友在1999年提出,被广泛应用于计算机视觉和机器视觉领域。其原理主要包括以下几个步骤:
- **拍摄图像:**在不同角度和位置下使用相机拍摄多张包含棋盘格标定板的图像。
- **棋盘格角点提取:**对拍摄的图像进行处理,提取出棋盘格上的角点位置。
- **棋盘格三维坐标计算:**根据棋盘格的实际尺寸,计算出棋盘格上角点的三维坐标。
- **相机内部参数优化:**使用非线性最小二乘法优化相机的内部参数,包括焦距、主点位置、径向畸变和切向畸变等。
- **相机外部参数计算:**根据棋盘格角点的图像坐标和三维坐标,计算相机的外部参数,包括旋转矩阵和平移向量。
- **重投影误差优化:**通过最小化重投影误差来优化相机内外参数,使得图像空间和物体空间之间的映射关系更准确。
- **评估标定结果:**评估标定结果的准确性和稳定性,可以通过畸变校正、相机校正等方法对相机进行修正和补偿。
通过以上步骤,张正友标定法可以得到相机的准确内外参数,并且能够有效消除图像中的畸变,提高相机标定的精度和稳定性。
3、张正友标定法理论推导过程
张正友标定法的公式推导过程主要包括以下几个步骤:
**1)单张图像成像模型:**首先根据针孔相机模型,可以得到单张图像中一个角点的成像坐标和物体坐标之间的关系。设相机内参矩阵为K,外参矩阵为R∣T,则可以得到单个角点的成像坐标u,v

**2)多张图像标定:**通过多张图像中多个角点的成像和物体坐标关系,可以建立成像坐标和物体坐标之间的映射关系。通过对多个角点的成像坐标和物体坐标进行整体优化,可以得到相机的内外参数。张正友标定法采用了SVD(奇异值分解)来解决这个优化问题,使问题变为一个线性求解问题。
**3)畸变校正:**在标定相机时还需考虑到透镜畸变问题,需要对相机进行畸变校正。张正友标定方法通过透镜畸变的多项式模型来校正径向和切向畸变。
通过以上步骤,可以得到张正友标定法的公式推导过程,最终结果是通过多个角点在多个图像中的成像坐标和物体坐标之间的关系来求解相机的内外参数,并对畸变进行校正,从而实现对相机进行标定。
4、实验准备
单目相机标定是在相机的成像过程中确定相机的内部参数和外部参数的过程,以提高相机成像的准确性。在进行单目相机标定之前,需要进行以下准备工作:
-
准备标定板:使用标定板可以提高标定的精度,通常使用的是带有方格和特定图案的标定板,可以被相机准确识别和计算。标定板必须是平整的,表面不能有损伤、污渍等影响标定结果的因素。
-
**安装标定板:**将标定板固定在一块大片木板或者其他固定支架上,确保标定板平整且没有移动。
-
**设置相机参数:**在进行标定前,需要确保相机参数设置正确,包括相机的曝光时间、焦距、光圈等参数,确保能够获得清晰且准确的标定板图像。
-
**确保相机焦距:**在进行标定时,需要确保相机焦距是固定的,不可更改。如果需要改变焦距,需要重新进行标定。
-
**准备标定软件:**在进行标定过程中,需要使用专门的标定软件,例如matlab中的相机标定工具箱,以获取相机的内部参数和外部参数。
通过以上准备工作,可以有效地进行单目相机标定,并获得准确的标定结果,以提高相机成像的准确性和稳定性。
1)棋盘格准备
棋盘格规格:边长20mm/角点为7*11(可根据自己需求进行设计)
A4纸打印棋盘格
实验棋盘格文件文章末尾链接
2)相机图像采集
彩色相机图片
图片数据文章末尾链接


5、实验过程:
在MATLAB中,提供了相机标定的工具箱,可以方便地进行单目相机标定实验。以下是一个简单的步骤,用于在MATLAB中实现单目相机标定实验:
-
**准备标定板:**首先准备一个带有方格和特定图案的标定板,例如Checkerboard或Dot grid。确保标定板在单目相机成像时,能够清晰地获取到标定板图像。
-
**拍摄标定板图像:**将标定板固定在适当位置,并使用相机拍摄多张标定板图像。确保在拍摄时,标定板的各个角度和位置都有所变化,以获得更好的标定结果。
-
在MATLAB中导入图像: 将拍摄到的标定板图像导入MATLAB环境中,可以使用
imread函数加载图像。 -
使用相机标定工具箱: MATLAB提供了
Camera Calibration Toolbox工具箱,可以用于单目相机的标定。在MATLAB命令窗口中运行cameraCalibrator函数打开相机标定工具窗口。 -
**添加标定板图像:**在相机标定工具窗口中,通过"Add Images"按钮添加之前拍摄的标定板图像,以进行相机标定。
-
**进行相机标定:**在相机标定工具窗口中,选择相机标定的方法和参数,然后点击"Calibrate"按钮进行相机标定。MATLAB会对标定板图像进行处理,并计算出相机的内部参数和外部参数。
-
评估标定结果:在相机标定工具窗口中,可以查看相机的标定误差,以评估标定结果的准确性。如果标定误差较大,可以尝试重新拍摄标定板图像,或者调整标定参数进行重新标定。
通过以上步骤,可以在MATLAB中使用相机标定工具箱实现单目相机的标定实验,以获取相机的内部参数和外部参数,提高相机成像的准确性和稳定性。
1)找到APP
点击app

点击下拉
点击单目相机标定模块

2)导入数据
点击添加图片

导入标定棋盘格图
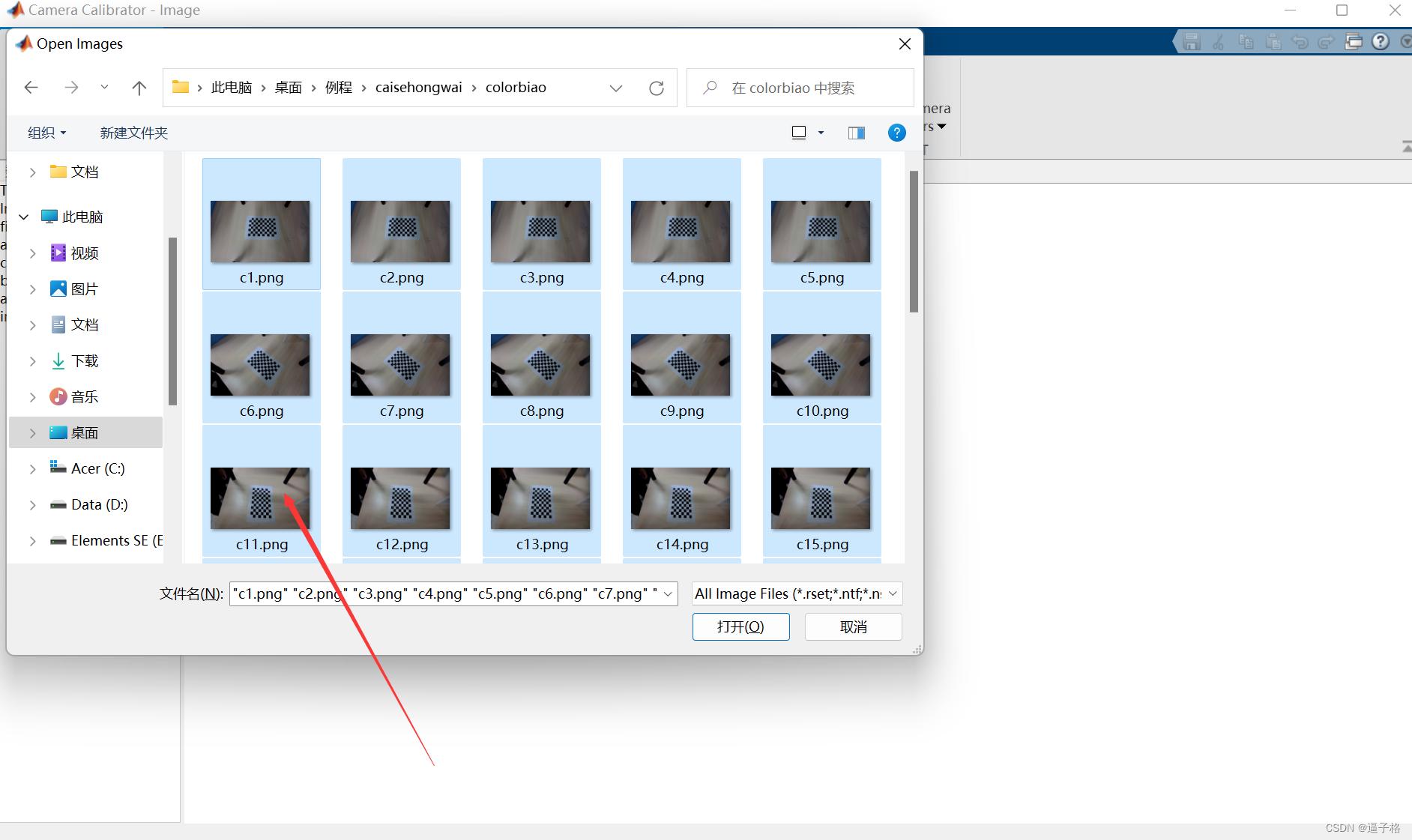
设置棋盘格宽度单位毫米

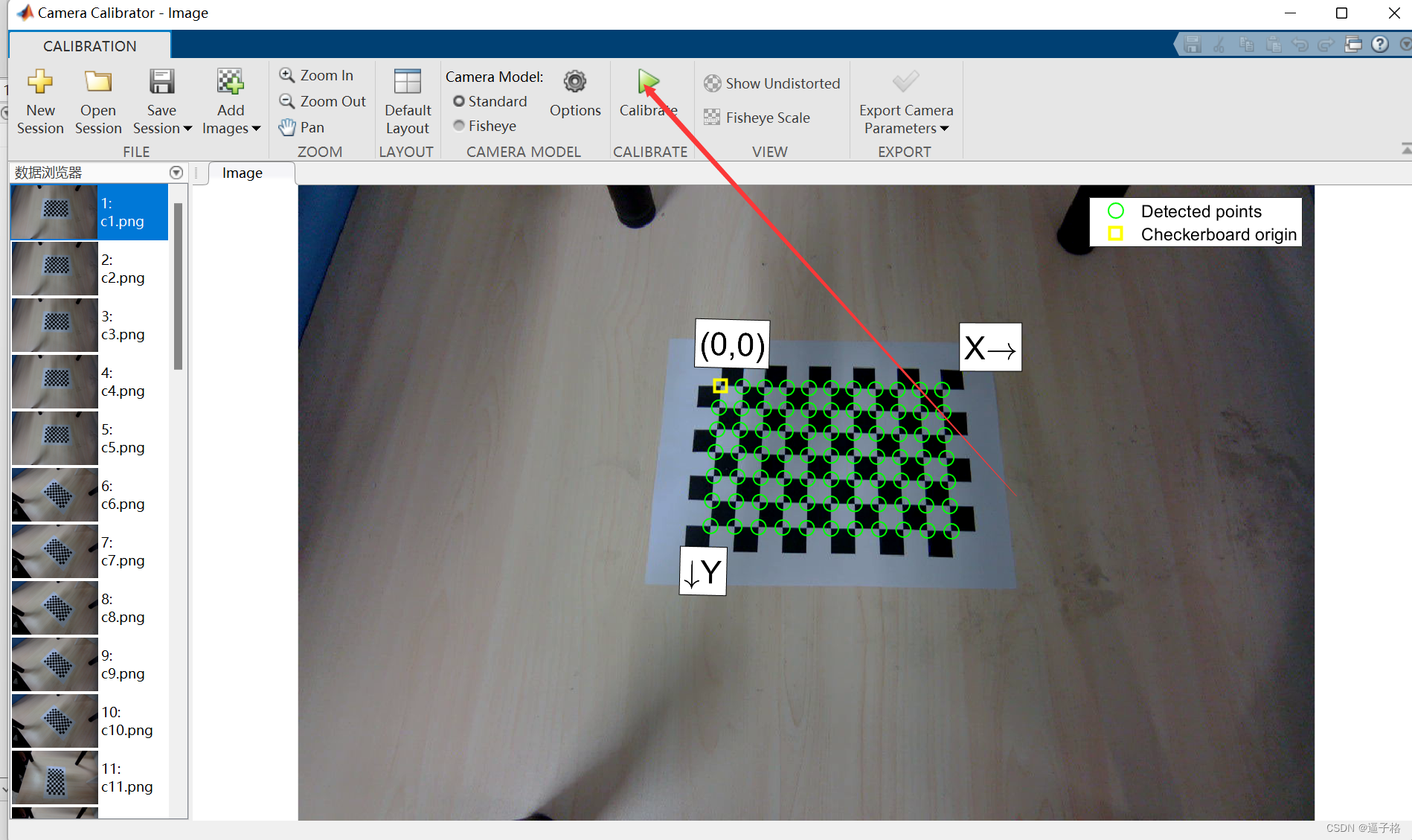
3)角点识别
识别过程

角点识别结果

4)畸变参数设置
径向畸变和切向畸变参数设置

5)开始标定
点击开始标定
6)标定结果
标定结果界面:1表示误差结果 2表示棋盘格相对相机转动示意图

棋盘格说明:黄色方框表示世界坐标系原点 绿色圆圈表示角点 红色十字表示重投影点

保存结果

结果内容:1表示相机内外参数 2表示标定精度评估 3表示投影点
实验结果文件文章末尾链接

6、实验资源
1)棋盘格
https://download.csdn.net/download/XU157303764/89354653
2)棋盘格标定图
https://download.csdn.net/download/XU157303764/89354880
3)标定结果数据
https://download.csdn.net/download/XU157303764/89354862
7、总结
在MATLAB中进行单目相机标定通常可以遵循以下步骤:
-
**准备标定板:**选取合适的标定板,如Checkerboard或Dot grid,确保标定板图案清晰可识别。
-
**拍摄标定板图像:**使用单目相机拍摄多张标定板图像,并确保角度和位置变化。
-
导入图像 :将拍摄的标定板图像导入MATLAB环境中,使用
imread函数加载图像。 -
打开相机标定工具箱: 运行
cameraCalibrator函数打开相机标定工具窗口。 -
**添加并标定图像:**在相机标定工具窗口中,通过"Add Images"按钮添加标定板图像,然后点击"Calibrate"按钮进行相机标定。
-
**查看标定结果:**在标定完成后,可以查看相机的内部参数(如焦距、主点位置)和外部参数(如相机位置和姿态信息)。
-
**评估标定结果:**检查标定误差以评估标定结果的准确性,并根据需要调整标定参数或重新标定。
-
**保存标定结果:**将相机的内部参数和外部参数保存下来,以备将来使用。
通过以上步骤,可以使用MATLAB中的相机标定工具箱完成单目相机的标定,获得准确的相机参数,提高图像处理和计算的准确性。需要注意的是,在进行标定时要确保标定板和相机位置的稳定性,以及标定板图案的清晰度。