目录
[Hi3861 RiSC-V boot 启动文件介绍](#Hi3861 RiSC-V boot 启动文件介绍)
[Loaderboot 启动过程](#Loaderboot 启动过程)
BootLoader的启动与运行
Hi3861 RiSC-V boot 启动文件介绍
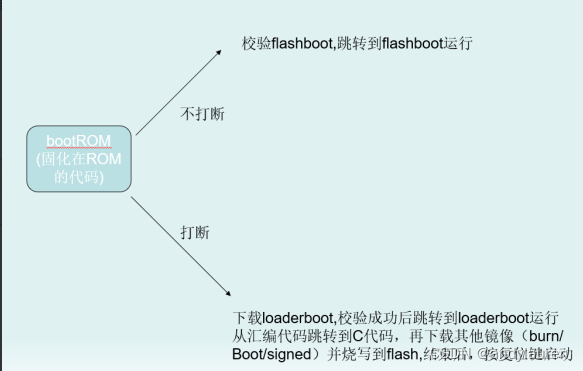
- Hi3861 的引导程序分为两部分,一部分是在芯片出厂时已经固定在 ROM,这部分的代码主要实现的功能是:芯片上电后,如果没有被打断(没有执行烧录过程)时会检验 flashboot,检验成功后跳转到flashboot 代码处运行;芯片上电后如果被打断(复位操作并执行烧录过程)时,下载 loaderboot,下载完之后校验成功跳转到 loaderboot 运行,汇编代码跳转到 C 代码,再下载其他镜像(burn、boot、signed)并烧录到 flash,结束后,按复位键,芯片启动。
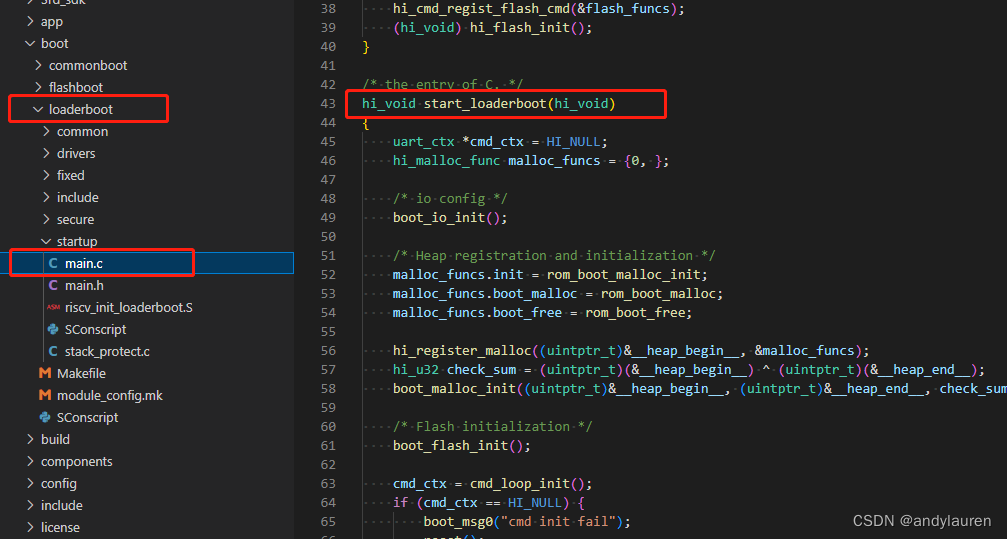
Loaderboot 启动过程
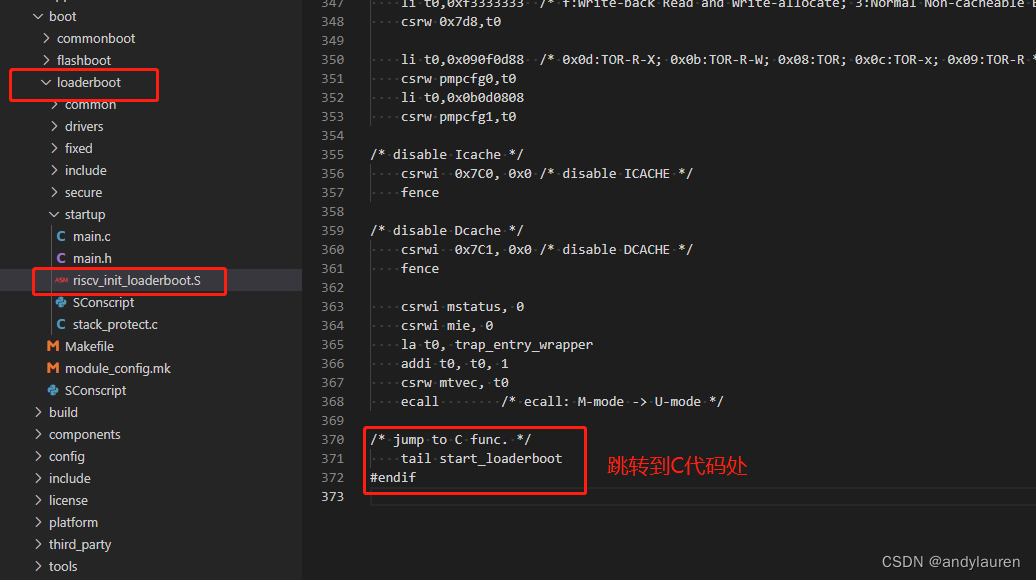
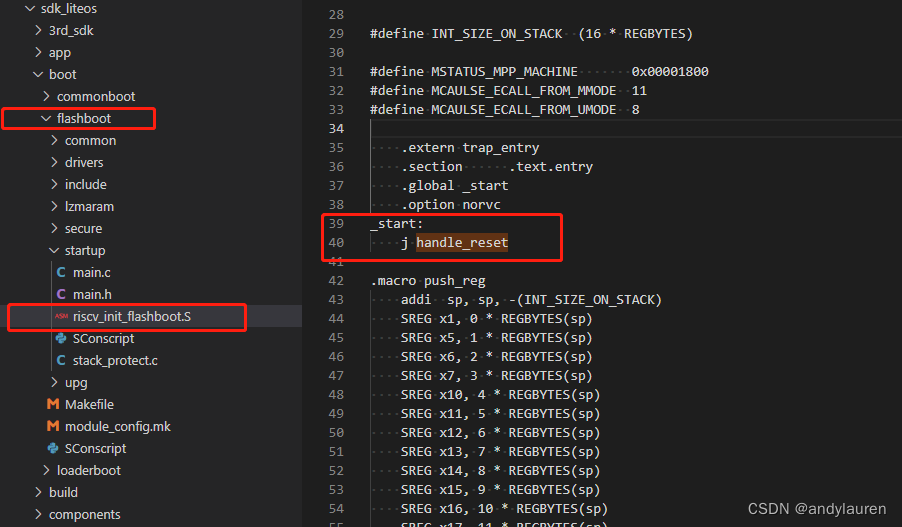
- Loaderboot 启动过程:路径: ./device/hisilicon/hispark_pegasus/sdk_liteos/boot/loaderboot/startup
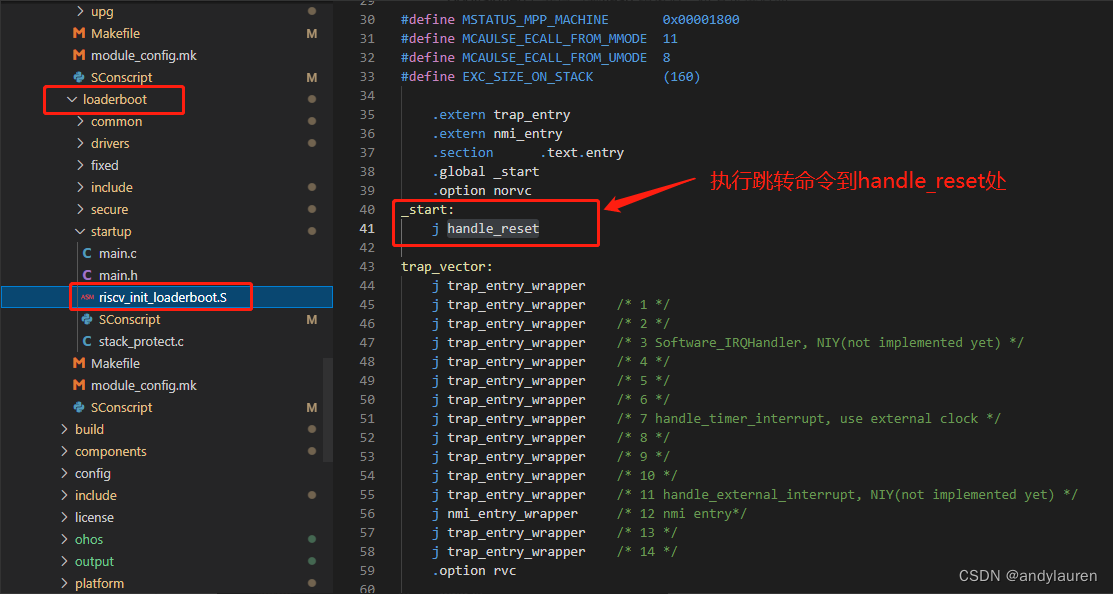
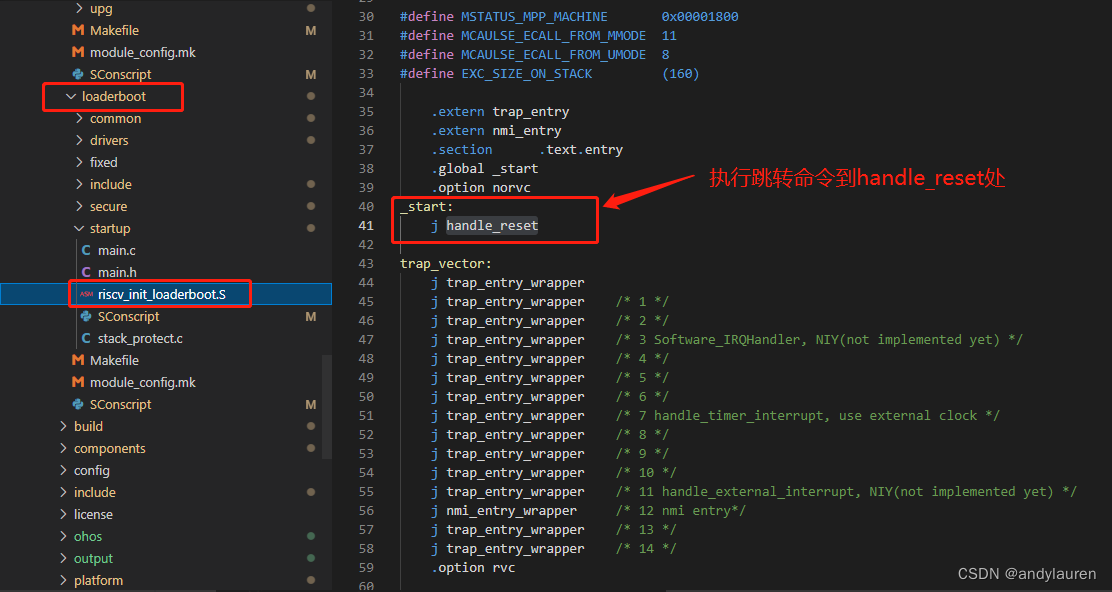
- Loaderboot 跳转到 C 代码:
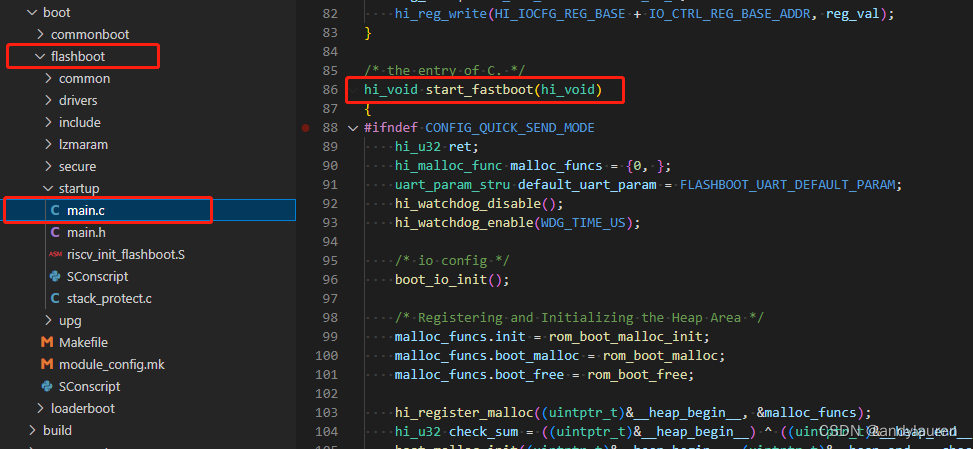
Flashboot代码介绍
- Flashboot 的执行逻辑与上述的 loaderboot 执行逻辑一致。路径: ./device/hisilicon/hispark_pegasus/sdk_liteos/boot/Flashboot/startup
- Flashboot 跳转到 C 代码:
以上就是启动流程,其实就是两个入口,一个是boot入口,一个是正常运行的flash入口。
下面我们讲一下串口的设置。
printf串口配置
在hi_void start_fastboot(hi_void)函数中
uart_param_stru default_uart_param = FLASHBOOT_UART_DEFAULT_PARAM;
定义了串口,宏的代码如下
#define FLASHBOOT_UART_DEFAULT_PARAM {115200, 8, 1, 0, 0, 0, 2, 1, 4}数据具体意义需要结构体的定义,如下
typedef struct {
hi_u32 baudrate; /* Baud rate */
hi_uchar databit; /* 5; 6; 7; 8 */
hi_uchar stopbit; /* 1:stop_bit 1; 2: stop_bit 2. */
hi_uchar parity; /* 0: None; 1:Odd; 2:Even */
hi_uchar flow_ctrl; /* 0: None; 1:rts&&cts. 2:only rts; 3:only cts */
hi_uchar fifoline_tx_int; /* 0:tx FIFO≤1/8full; 1:tx FIFO≤1/4full; 2:tx FIFO≤1/2full;
3:tx FIFO≤3/4full; 4:tx FIFO≤7/8full */
hi_uchar fifoline_rx_int; /* 0:rx FIFO≥1/8full; 1:rx FIFO≥1/4full; 2:rx FIFO≥1/2full;
3:rx FIFO≥3/4full; 4:rx FIFO≥7/8full */
hi_uchar fifoline_rts; /* 0:rx FIFO≥1/8full; 1:rx FIFO≥1/4full; 2:rx FIFO≥1/2full;
3:rx FIFO≥3/4full; 4:rx FIFO≥7/8full */
hi_uchar pad;
} uart_param_stru;用结构体和上面的数据一一对应即可。
调用如下函数进行初始化,串口0
/* Initializing the Debugging Serial Port */
ret = serial_init(UART0, default_uart_param);内核启动任务
在上面我们讲过在start_fastboot函数中进入应用程序,在start_fastboot函数中会调用execute_upg_boot继续进行引导,再调用boot_head继续进行,函数里调用boot_get_start_addr_offset函数获取启动地址的偏移量,获取偏移量后调用boot_kernel函数启动任务。
hi_void start_fastboot(hi_void)
└─hi_void execute_upg_boot(hi_void)
└─hi_void boot_head(hi_void)
├─hi_void boot_get_start_addr_offset(hi_u32 addr, hi_u32 *offset)
└─hi_void boot_kernel(uintptr_t kaddr)在boot_kernel函数中,使用之前取到的任务地址进行任务函数启动
hi_void boot_kernel(uintptr_t kaddr)
{
__asm__ __volatile__("ecall"); /* switch U-MODE -> M-MODE */
hi_void (*entry)(hi_void) = (hi_void*)(kaddr);
entry();
}