CH347应用开发手册 V1.3
一、简介
CH347是一款USB2.0高速转接芯片,以实现USB-UART(HID串口/VCP串口)、USB-SPI、USB-I2C、USB-JTAG以及USB-GPIO等接口,分别包含在芯片的四种工作模式中。
CH347DLL用于为CH347芯片提供操作系统端的UART/SPI/I2C/JTAG/BitStream等接口操作函数,支持CH341厂商/HID/VCP驱动接口,使用时无需区分驱动接口和芯片工作模式。
二、接口说明
根据CH347所支持的USB转接接口特性,CH347DLL提供了USB-UART(HID串口/VCP串口)、USB-SPI、USB-I2C、USB-JTAG以及USB-GPIO的接口功能函数,包括基本功能函数与对应的功能函数,如EEPROM读写,JTAG应用中的SHIFT-DR状态读写等。
CH347所支持接口如下表所示,通过上电时MODE配置引脚电平组合来切换不同模式。
| 工作模式 | 功能接口说明 | 驱动接口 | API |
|---|---|---|---|
| 模式 0 | 接口 0:USB 转高速串口 0 | CH343SER(VCP) | 系统内原生串口 API 或CH347DLL 内 CH347UART_xxx |
| 接口 1:USB 转高速串口 1 | |||
| 模式 1 | 接口 0:USB2.0 转高速串口 1 | CH343SER(VCP) | 系统内原生串口 API 或CH347DLL 内 CH347UART_xxx |
| 接口 1: USB2.0 转 SPI+I2C | CH347PAR | CH347DLL 内 CH347SPI_xxx CH347I2C_xxx | |
| 模式 2 | 接口 0:USB2.0 HID 转高速串口 1 | 系统自带 HID 驱动 | CH347UART_xxx |
| 接口 1:USB2.0 HID 转 SPI+I2C | CH347DLL 内 CH347SPI_xxx CH347I2C_xxx | ||
| 模式 3 | 接口 0:USB2.0 转高速串口 1 | CH343SER(VCP) | 系统内原生串口 API 或CH347DLL 内 CH347UART_xxx |
| 接口 1:USB2.0 转 JTAG+I2C | CH347PAR | CH347DLL 内 CH347JTAG_xxx CH347I2C_xxx |
Table. CH347 接口功能 API 表
三、同步串行接口
3.1 相关数据类型 //驱动接口
c
#define CH347_USB_CH341 0
#define CH347_USB_HID 2
#define CH347_USB_VCP 3 //芯片功能接口号
#define CH347_FUNC_UART 0
#define CH347_FUNC_SPI_IIC 1
#define CH347_FUNC_JTAG_IIC 23.1.1 SPI 控制器信息
c
typedef struct _SPI_CONFIG{
UCHAR iMode; // 0-3:SPI Mode0/1/2/3
UCHAR iClock; // 0=60MHz, 1=30MHz, 2=15MHz, 3=7.5MHz,
4=3.75MHz, 5=1.875MHz,
6=937.5KHz,7=468.75KHz
UCHAR iByteOrder; // 0=低位在前(LSB), 1=高位在前(MSB)
USHORT iSpiWriteReadInterval; // SPI 接口常规读取写入数据命令,单位为 uS
UCHAR iSpiOutDefaultData; // SPI 读数据时默认输出数据
ULONG iChipSelect; // 片选控制, 位 7 为 0 则忽略片选控制, 位 7 为
1 则参数有效: 位 1 位 0 为 00/01 分别选择
CS1/CS2 引脚作为低电平有效片选
UCHAR CS1Polarity; // 位 0:片选 CS1 极性控制,0:低电平有效;
1:高电平有效;
UCHAR CS2Polarity; // 位 0:片选 CS2 极性控制,0:低电平有效;
1:高电平有效;
USHORT iIsAutoDeativeCS; // 操作完成后是否自动撤消片选
USHORT iActiveDelay; // 设置片选后执行读写操作的延时时间,单位 uS
ULONG iDelayDeactive; // 撤消片选后执行读写操作的延时时间,单位 uS
}mSpiCfgS,*mPSpiCfgS;3.1.2 设备信息
c
typedef struct _DEV_INFOR{
UCHAR iIndex; // 当前打开序号
UCHAR DevicePath[MAX_PATH];
UCHAR UsbClass; // 0:CH341 Vendor; 1:CH347 Vendor; 2:HID
UCHAR FuncType; // 0:UART1; 1:SPI+I2C; 2:JTAG+I2C
CHAR DeviceID[64]; // USB\VID_xxxx&PID_xxxx
UCHAR Mode; // 芯片模式,0: Mode0(UART*2);
1: Mode1(Uart1+SPI+I2C);
2: Mode2(HID Uart1+SPI+I2C)
3: Mode3(Uart1+Jtag+I2C)
HANDLE DevHandle; // 设备句柄
USHORT BulkOutEndpMaxSize; // 上传端点大小
USHORT BulkInEndpMaxSize; // 下传端点大小
UCHAR UsbSpeedType; // USB 速度类型,0:FS,1:HS,2:SS
UCHAR CH347FuncType; // USB 接口号
UCHAR DataUpEndp; // 端点地址
UCHAR DataDnEndp; // 端点地址
CHAR ProductString[64]; // USB 产品字符串
CHAR ManufacturerString[64]; // USB 厂商字符串
ULONG WriteTimeout;// USB 写超时
ULONG ReadTimeout; // USB 读超时
CHAR
FuncDescStr[64];// 接口功能描述符
UCHAR
FirewareVer;// 固件版本
}mDeviceInforS,*mPDeviceInforS3.2 公共操作函数
3.2.1 CH347OpenDevice
功能描述
该函数用于打开 CH347 设备,支持 CH347 所有模式下的 SPI/I2C/JTAG 接口的打开
函数定义
c
HANDLE WINAPI
CH347OpenDevice( ULONG DevI);参数说明
DevI: 指定操作设备序号
返回值
执行成功返回设备序号
3.2.2 CH347CloseDevice
功能描述
该函数用于关闭 CH347 设备,支持 CH347 所有模式下 SPI/I2C/JTAG 接口的关闭
函数定义
c
BOOL WINAPI
CH347CloseDevice( ULONG iIndex)参数说明
iIndex: 指定操作设备序号
返回值
执行成功返回 1,失败返回 0
3.2.3 CH347SetDeviceNotify
功能描述
该函数用于指定设备事件通知程序,可用于 CH347 所有模式下 SPI/I2C/JTAG 接口的动
态插拔检测
函数定义
c
BOOL WINAPI
CH347SetDeviceNotify( ULONG iIndex,
PCHAR iDeviceID,
mPCH347_NOTIFY_ROUTINE iNotifyRoutine)参数说明
iIndex:指定操作设备序号
iDeviceID:可选参数,指向字符串,指定被监控的设备的 ID,字符串以\0 终止
iNotifyRoutine:指定设备事件回调程序,为 NULL 则取消事件通知,否则在检测到事件时调用该程序
返回值
执行成功返回 1,失败返回 0
注解
iDeviceID 该参数为可变参数,若需实现 CH347 设备的插拔检测,可定义宏如下
#define CH347DevID "VID_1A86&PID_55D\0"
传参时 iDeviceID 替换为 CH347DevID 即可实现对 CH347 同步串行接口的动态插拔检测
若需准确检测各模式下接口的插拔动作,可写下完整的 USBID,以模式 1 中 SPI 接口为例,可定义下方宏:
#define USBID_VEN_SPI_I2C "VID_1A86&PID_55DB&MI_02\0"
传参时 iDeviceID 替换为 USBID_VEN_SPI_I2C 即可实现对 CH347 模式 1 的 SPI&I2C 接口的动态插拔检测其他接口设置可参考 3.2.7 接口动态插拔检测
3.2.4 CH347GetDeviceInfor
功能描述
该函数用于获取设备当前接口模式、VID/PID 等信息
函数定义
c
BOOL WINAPI
CH347GetDeviceInfor(ULONG iIndex,
mDeviceInforS *DevInformation)参数说明
iIndex:指定操作设备序号
DevInformation:设备信息结构体
返回值
执行成功返回 1,失败返回 0
注解
设备信息结构体,可参考_DEV_INFOR
3.2.5 CH347GetVersion
功能描述
该函数用于获得驱动版本、库版本、设备版本、芯片类型(CH341(FS)/CH347(HS))
函数定义
c
BOOL WINAPI
CH347GetVersion(ULONG iIndex,
PUCHAR iDriverVer,
PUCHAR iDLLVer,
PUCHAR ibcdDevice,
PUCHAR iChipType)参数说明
iIndex:指定操作设备序号
iDriverVer:驱动版本信息
iDLLVer:库版本信息
ibcdDevice:设备版本信息
iChipType:芯片类型
返回值
执行成功返回 1,失败返回 0
3.2.6 CH347SetTimeout
功能描述
该函数用于设置 USB 数据读写的超时
函数定义
c
BOOL
WINAPI
CH347SetTimeout(ULONG iIndex,
ULONG iWriteTimeout,
ULONG iReadTimeout )参数说明
iIndex:指定操作设备序号
iWriteTimeout: 指定 USB 写出数据块的超时时间,以毫秒 mS 为单位,0xFFFFFFFF 指定不超时(默认值)
iReadTimeout: 指定 USB 读取数据块的超时时间,以毫秒 mS 为单位,0xFFFFFFFF 指定不超时(默认值)
返回值 执行成功返回 1,失败返回 0
3.2.7 接口动态插拔检测
检测同步串行接口动态插拔信息可通过 CH347SetDeviceNotify 函数来实现,代码参考如下:
启用 CH347 同步串行接口 USB 的插入和移除的监测:
CH347SetDeviceNotify(DevIndex, USBDevID, UsbDevPnpNotify);
关闭 CH347 同步串行接口 USB 的插入和移除的监测,在程序退出时一定要关闭。
CH347SetDeviceNotify(DevIndex, USBDevID, NULL); // CH347 设备插拔检测通知程序
c
VOID
CALLBACK UsbDevPnpNotify (ULONG iEventStatus )
{
if(iEventStatus==CH347_DEVICE_ARRIVAL) // 设备插入事件,已经插入
PostMessage(DebugHwnd,WM_CH347DevArrive,0,0);
else if(iEventStatus==CH347_DEVICE_REMOVE) // 设备拔出事件,已经拔出
PostMessage(DebugHwnd,WM_CH347DevRemove,0,0);
return;
}若需做到准确检测各模式下的 SPI/I2C/JTAG 接口插拔信息,可写下如下完整 USBID,在使用 CH347SetDeviceNotify 时将 iDeviceID 替换成相应的 USBID 宏即可。
c
//MODE1 SPI/I2C
#define USBID_VEN_Mode1_SPI_I2C "VID_1A86&PID_55DB&MI_02\0"
//MODE2 SPI/I2C
#define USBID_HID_Mode2_SPI_I2C "VID_1A86&PID_55DC&MI_01\0"
//MODE3 JTAG/I2C
#define USBID_VEN_Mode3_JTAG_I2C "VID_1A86&PID_55DA&MI_02\0"3.2.8 设备枚举操作
在本接口库中,API 通过指定设备序号实现对应操作,设备序号是设备逐个插入的过程中,根据其插入顺序进行编号产生。实现设备枚举功能可以通过设备 Open 函数打开对应设备序号,根据函数返回值判断设备是否有效且存在。
其中 SPI/I2C/JTAG 接口的打开/关闭函数可用:CH347OpenDevice/CH347CloseDevice。
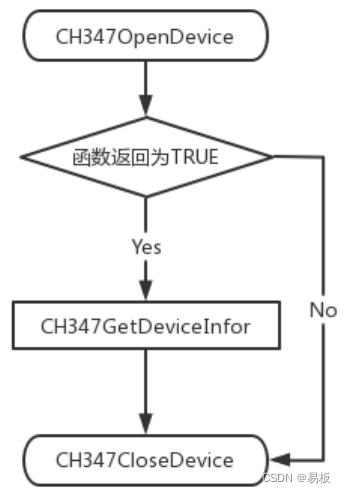
Figure 3.2.8 设备枚举操作流程图
3.3 SPI 功能函数
3.3.1 操作流程
打开设备后,设置设备 USB 读写超时参数,配置 SPI 控制器参数后进行 SPI 初始化设置,设置成功后即可通过调用 SPI 读写函数与设备进行通讯。
函数调用流程图如下:
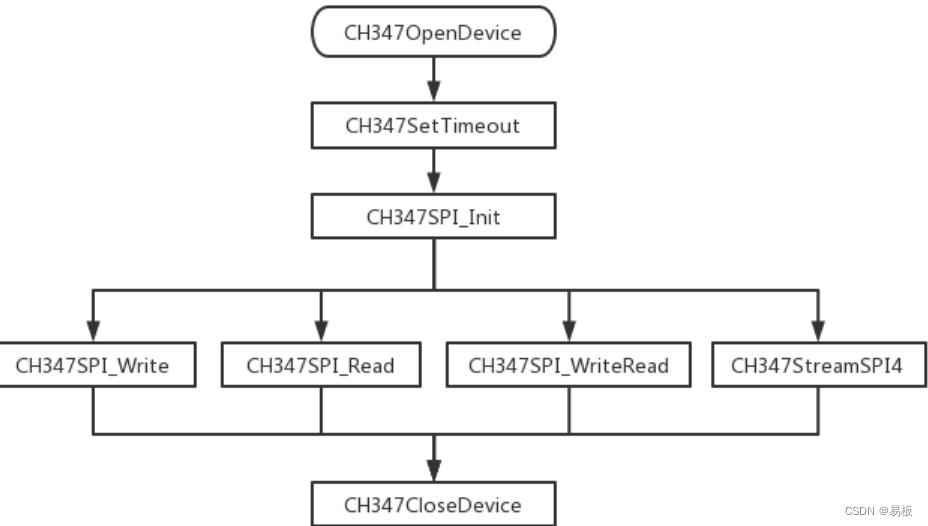
Figure 3.3.1 SPI 函数操作流程图
函数具体说明请参考以下内容。
3.3.2 CH347SPI_Init
功能描述
该函数用于对 SPI 控制器进行参数配置
函数定义
c
BOOL WINAPI
CH347SPI_Init( ULONG iIndex,
mSpiCfgS *SpiCfg)参数说明
iIndex:指定操作设备序号
SpiCfg:SPI 控制器配置
返回值
执行成功返回 1,失败返回 0
注解
SPI 控制器配置可参考结构体_SPI_CONFIG
3.3.3 CH347SPI_GetCfg
功能描述
该函数用于获取 SPI 控制器当前配置
函数定义
c
BOOL WINAPI
CH347SPI_GetCfg( ULONG iIndex,
SpiCfgS *SpiCfg)参数说明
iIndex:指定操作设备序号
SpiCfg:SPI 控制器配置
返回值
执行成功返回 1,失败返回 0
注解
SPI 控制器配置可参考结构体_SPI_CONFIG
3.3.4 CH347SPI_ChangeCS
功能描述
该函数用于设置片选状态,使用前需先调用 CH347SPI_Init 对 CS 进行设置
函数定义
c
BOOL WINAPI
CH347SPI_ChangeCS( ULONG iIndex,
UCHAR iStatus)参数说明
iIndex:指定操作设备序号
iStatus:0=撤销片选,1=设置片选
返回值
执行成功返回 1,失败返回 0
3.3.5 CH347SPI_SetChipSelect
功能描述
该函数用于设置 SPI 片选
函数定义
c
BOOL WINAPI
CH347SPI_SetChipSelect( ULONG iIndex,
USHORT iEnableSelect,
USHORT iChipSelect,
ULONG iIsAutoDeativeCS,
ULONG iActiveDelay,
ULONG iDelayDeactive);参数说明
iIndex:指定操作设备序号
iEnableSelect:低八位为 CS1,高八位为 CS2;字节值为 0=设置 CS,为 1=忽略此 CS 设置
iChipSelect:低八位为 CS1,高八位为 CS2;片选输出,0=撤消片选,1=设置片选
iIsAutoDeativeCS: 低 16 位为 CS1,高 16 位为 CS2;操作完成后是否自动撤消片选
iActiveDelay:低 16 位为 CS1,高 16 位为 CS2;设置片选后执行读写操作的延时时间,单位 uS
iDelayDeactive:低 16 位为 CS1,高 16 位为 CS2;撤消片选后执行读写操作的延时时间,单位 uS
返回值
执行成功返回 1,失败返回 0
3.3.6 CH347SPI_Write
功能描述
该函数用于 SPI 写数据
函数定义
c
BOOL WINAPI
CH347SPI_Write( ULONG iIndex,
ULONG iChipSelect,
ULONG iLength,
ULONG iWriteStep,
PVOID ioBuffer);参数说明
iIndex:指定操作设备序号
iChipSelect: 片选控制, 位 7 为 0 则忽略片选控制, 位 7 为 1 进行片选操作
iLength:准备传输的数据字节数
iWriteStep:准备读取的单个块的长度
ioBuffer:指向一个缓冲区,放置准备从 MOSI 写出的数据
返回值
执行成功返回 1,失败返回 0
3.3.7 CH347SPI_Read
功能描述
该函数用于读取 SPI 数据
函数定义
c
BOOL WINAPI
CH347SPI_Read( ULONG iIndex,
ULONG iChipSelect,
ULONG oLength,
PULONG iLength,
PVOID ioBuffer);参数说明
iIndex:指定操作设备序号
iChipSelect: 片选控制, 位 7 为 0 则忽略片选控制, 位 7 为 1 进行片选操作
oLength:准备发出的数据字节数
iLength:准备读取的数据字长度
ioBuffer:指向一个缓冲区,放置准备从 MOSI 写出的数据,返回后是从 MISO 读入的数据
返回值
执行成功返回 1,失败返回 0
3.3.8 CH347SPI_WriteRead
功能描述
该函数用于写入和读取 SPI 数据流
函数定义
c
BOOL WINAPI
CH347SPI_WriteRead( ULONG iIndex,
ULONG iChipSelect,
ULONG iLength,
PVOID ioBuffer );参数说明
iIndex:指定操作设备序号
iChipSelect: 片选控制, 位 7 为 0 则忽略片选控制, 位 7 为 1 进行片选操作
iLength:准备传输的数据字节数
ioBuffer:指向一个缓冲区,放置准备从 MOSI 写出的数据,返回后是从 MISO 读入的数据
返回值
执行成功返回 1,失败返回 0
3.3.9 CH347StreamSPI4
功能描述
该函数用于处理 SPI 数据流,写入的同时读出数据
函数定义
c
BOOL WINAPI
CH347StreamSPI4(ULONG iIndex,
ULONG iChipSelect,
ULONG iLength,
PVOID ioBuffer );参数说明
iIndex:指定操作设备序号
iChipSelect: 片选控制, 位 7 为 0 则忽略片选控制, 位 7 为 1 进行片选操作
iLength:准备传输的字节数
ioBuffer:指向一个缓冲区,放置准备从 MOSI 写出的数据,返回后是从 MISO 读入的数据
返回值
执行成功返回 1,失败返回 0
3.4 JTAG 功能函数
3.4.1 操作流程
打开设备后,使用 CH347Jtag_INIT 对设备进行初始化操作;
使用 CH347Jtag_SwitchTapState(0)复位目标设备 JTAG TAP 状态为 Test-Logic-Reset状态,随后根据操作需求可使用对应函数切换到 SHIFT-DR/SHIFT-IR 状态进行读写操作,其中读写函数为位带方式读写与批量快速读写方式两种,可根据实际用途进行选择。
函数调用流程图如下:
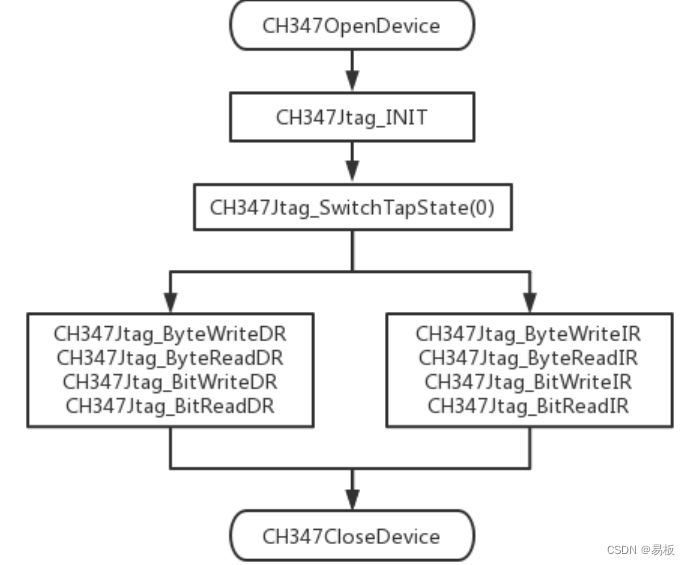
Figure 3.4.1 JTAG 函数操作流程图
函数具体说明请参考以下内容。
3.4.2 CH347Jtag_INIT
功能描述
该函数用于初始化 JTAG 接口与设置通信速度
函数定义
c
BOOL WINAPI
CH347Jtag_INIT( ULONG iIndex,
UCHAR iClockRate);参数说明
iIndex:指定操作设备序号
iClockRate:通信速度;有效值为 0-5,值越大通信速度越快
返回值
执行成功返回 1,失败返回 0
3.4.3 CH347Jtag_WriteRead
功能描述
该函数以位带方式进行 SHIFT-DR/IR 状态数据读写。适用于少量数据读写。如指令操作、状态机切换等控制类传输。如批量数据传输,建议使用 CH347Jtag_WriteRead_Fast 命令包以字节为单位进行批量读写。
函数定义
c
BOOL
WINAPI
CH347Jtag_WriteRead(ULONG iIndex,
BOOL IsDR,
ULONG iWriteBitLength,
PVOID iWriteBitBuffer,
PULONG oReadBitLength,
PVOID oReadBitBuffer )参数说明
iIndex:指定操作设备序号
IsDR:判断切换状态进行读写,
TRUE= SHIFT-DR 数据读写,FALSE=SHIFT-IR 数据读写
iWriteBitLength: 准备写出的数据长度
iWriteBitBuffer: 指向一个缓冲区,放置准备写出的数据
oReadBitLength:指向长度单元,返回后为实际读取的长度
oReadBitBuffer:指向一个足够大的缓冲区,用于保存读取的数据
返回值
执行成功返回 1,失败返回 0
注解
该函数通过 IsDR 的值来判断操作 JTAG 状态切换到 SHIFT-DR 还是 SHIFT-IR 状态,然后以位带的方式进行数据读写之后再切换回 RUN-TEST 状态,其状态切换路径如下:
Run-Test->Shift-IR/DR...->Exit IR/DR -> Run-Test
3.4.4 CH347Jtag_WriteRead_Fast
功能描述
该函数用于切换至 SHIFT-IR/DR 状态进行数据批量读写,用于多字节连续读写。如 JTAG固件下载操作。
函数定义
c
BOOL WINAPI
CH347Jtag_WriteRead_Fast(ULONG
iIndex,
BOOL IsDR,
ULONG
iWriteBitLength,
PVOID
iWriteBitBuffer,
PULONG oReadBitLength,
PVOID
oReadBitBuffer );参数说明
iIndex:指定操作设备序号
IsDR:判断切换状态进行读写,
TRUE = SHIFT-DR 数据读写,FALSE = SHIFT-IR 数据读写
iWriteBitLength: 准备写出的数据长度
iWriteBitBuffer: 指向一个缓冲区,放置准备写出的数据
oReadBitLength:指向长度单元,返回后为实际读取的长度
oReadBitBuffer:指向一个足够大的缓冲区,用于保存读取的数据
返回值
执行成功返回 1,失败返回 0
注解
该函数功能与 CH347Jtag_WriteRead 相似,但该函数使用批量读写方式,以字节格式进
行数据读写。
3.4.5 CH347Jtag_SwitchTapState
功能描述
该函数用于切换 JTAG 状态机状态
函数定义
BOOL CH347Jtag_SwitchTapState(UCHAR TapState)
参数说明
TapState:通过输入序号进行状态切换
返回值
执行成功返回 1,失败返回 0
注解
TapState 状态切换说明如下:
0:复位目标设备状态为 Test-Logic Reset
1:跟随上一状态进入 Run-Test/Idle
2:Run-Test/Idle -> Shift-DR
3:Shift-DR -> Run-Test/Idle
4:Run-Test/Idle -> Shift-IR
5:Shift-IR -> Run-Test/Idle
6:Exit1-DR -> Run-Test-Idle
3.4.6 CH347Jtag_ByteWriteDR
功能描述
该函数用于将 JTAG 状态机切换到 SHIFT-DR 状态,以字节为单位,可进行多字节连续读写。
函数定义
c
BOOL WINAPI
CH347Jtag_ByteWriteDR(ULONG iIndex,
ULONG iWriteLength,
PVOID iWriteBuffer);参数说明
iIndex:指定操作设备序号
iWriteLength: 准备写出数据的字节长度
iWriteBuffer: 指向一个缓冲区,放置准备写出的数据
返回值
执行成功返回 1,失败返回 0
3.4.7 CH347Jtag_ByteReadDR
功能描述
该函数用于将 JTAG 状态机切换到 SHIFT-DR 状态,以字节为单位,可进行多字节连续读写。
函数定义
c
BOOL WINAPI
CH347Jtag_ByteReadDR( ULONG iIndex,
PULONG oReadLength,
PVOID oReadBuffer);参数说明
iIndex:指定操作设备序号
oReadLength: 准备读取数据的字节长度
oReadBuffer: 指向一个缓冲区,放置准备读取的数据
返回值
执行成功返回 1,失败返回 0
3.4.8 CH347Jtag_ByteWriteIR
功能描述
该函数用于将 JTAG 状态机切换到 SHIFT-IR 状态,以字节为单位,可进行多字节连续读写。
函数定义
c
BOOL WINAPI
CH347Jtag_ByteWriteIR(ULONG
iIndex,
ULONG
iWriteLength,
PVOID
iWriteBuffer);参数说明
iIndex:指定操作设备序号
iWriteLength: 准备写出数据的字节长度
iWriteBuffer: 指向一个缓冲区,放置准备写出的数据
返回值
执行成功返回 1,失败返回 0
3.4.9 CH347Jtag_ByteReadIR
功能描述
该函数用于将 JTAG 状态机切换到 SHIFT-IR 状态,以字节为单位,可进行多字节连续读写。
函数定义
c
BOOL WINAPI
CH347Jtag_ByteReadIR(ULONG
iIndex,
PULONG
oReadLength,
PVOID
oReadBuffer);参数说明
iIndex:指定操作设备序号
oReadLength: 准备读取数据的字节长度
oReadBuffer: 指向一个缓冲区,放置准备读取的数据
返回值
执行成功返回 1,失败返回 0
3.4.10 CH347Jtag_BitWriteDR
功能描述
该函数用于将 JTAG 状态机切换到 SHIFT-DR 状态,以位带方式进行数据读写。
函数定义
c
BOOL WINAPI
CH347Jtag_BitWriteDR(ULONG
iIndex,
ULONG
iWriteLength,
PVOID
iWriteBuffer);参数说明
iIndex:指定操作设备序号
iWriteLength: 准备写出数据的字节长度
iWriteBuffer: 指向一个缓冲区,放置准备写出的数据
返回值
执行成功返回 1,失败返回 0
3.4.11 CH347Jtag_BitWriteIR
功能描述
该函数用于将 JTAG 状态机切换到 SHIFT-IR 状态,以位带方式进行数据读写。
函数定义
c
BOOL WINAPI
CH347Jtag_BitWriteIR(ULONG
iIndex,
ULONG
iWriteLength,
PVOID
iWriteBuffer);参数说明
iIndex:指定操作设备序号
iWriteLength: 准备写出数据的字节长度
iWriteBuffer: 指向一个缓冲区,放置准备写出的数据
返回值
执行成功返回 1,失败返回 0
3.4.12 CH347Jtag_BitReadIR
功能描述
该函数用于将 JTAG 状态机切换到 SHIFT-IR 状态,以位带方式进行数据读写。
函数定义
c
BOOL WINAPI
CH347Jtag_BitReadIR(ULONG
iIndex,
PULONG
oReadLength,
PVOID
oReadBuffer);参数说明
iIndex:指定操作设备序号
oReadLength: 准备读取数据的字节长度
oReadBuffer: 指向一个缓冲区,放置准备读取的数据
返回值
执行成功返回 1,失败返回 0
3.4.13 CH347Jtag_BitReadDR
功能描述
该函数用于将 JTAG 状态机切换到 SHIFT-DR 状态,以字节为单位,可进行多字节连续读写。
函数定义
c
BOOL WINAPI
CH347Jtag_BitReadDR(ULONG
iIndex,
PULONG
oReadLength,
PVOID
oReadBuffer);参数说明
iIndex:指定操作设备序号
oReadLength:准备读取数据的字节长度
oReadBuffer:指向一个缓冲区,放置准备读取的数据
返回值
执行成功返回 1,失败返回 0
3.5 I2C 功能函数
3.5.1 操作流程
打开指定操作设备获取设备序号,设置设备 I2C 接口速度/SCL 频率,进行 I2C 读写操作,函数调用流程图如下:
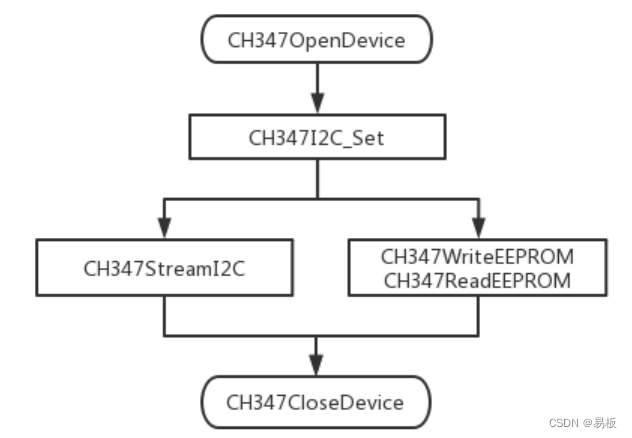
Figure 3.5.1 I2C 操作流程图
函数具体说明请参考以下内容。
3.5.2 相关数据类型
EEPROM 类型
c
typedef enum
_EEPROM_TYPE {
ID_24C01,
ID_24C02,
ID_24C04,
ID_24C08,
ID_24C16,
ID_24C32,
ID_24C64,
ID_24C128,
ID_24C256,
ID_24C512,
ID_24C1024,
ID_24C2048,
ID_24C4096
} EEPROM_TYPE;3.5.3 CH347I2C_Set
功能描述
该函数用于指定操作设备并设置 I2C 接口速度/SCL 频率
函数定义
c
BOOL WINAPI
CH347I2C_Set( ULONG iIndex,
ULONG iMode )参数说明
iIndex:指定操作设备序号
iMode:设置模式
位 1-0: 00=低速/20KHz,01=标准/100KHz(默认值),
10=快速/400KHz,11=高速/750KHz
位 7-2: 保留为 0
返回值
执行成功返回 1,失败返回 0
3.5.4 CH347I2C_SetDelaymS
功能描述
该函数用于设置硬件异步延时,调用后很快返回,而在下一个流操作之前延时指定毫秒数
函数定义
c
BOOL WINAPI
CH347I2C_SetDelaymS(ULONG iIndex,
ULONG iDelay) ;参数说明
iIndex:指定操作设备序号
iDelay:指定延时的毫秒数
返回值
执行成功返回 1,失败返回 0
3.5.5 CH347StreamI2C
功能描述
该函数用于处理 I2C 数据流,实现 I2C 数据的读取和写入
函数定义
c
BOOL WINAPI
CH347StreamI2C( ULONG iIndex,
ULONG iWriteLength,
PVOID iWriteBuffer,
ULONG iReadLength,
PVOID oReadBuffer )参数说明
iIndex:指定操作设备序号
iWriteLength: 准备写出的数据字节数
iWriteBuffer: 指向一个缓冲区,放置准备写出的数据,首字节通常是 I2C 设备地址及读写方向位,若地址长度超过 7 为则此字节仍可写入以此类推
iReadLength: 准备读取的数据字节数
oReadBuffer: 指向一个缓冲区,函数返回后为读入的数据
返回值
执行成功返回 1,失败返回 0
3.5.6 CH347ReadEEPROM
功能描述
该函数用于向 EEPROM 中读取数据块
函数定义
c
BOOL WINAPI
CH347ReadEEPROM( ULONG
iIndex,
EEPROM_TYPE iEepromID,
ULONG iAddr,
ULONG iLength,
PUCHAR iBuffer )参数说明
iIndex:指定操作设备序号
iEepromID:指定 EEPROM 型号
iAddr:指定数据单元的地址
iLength:准备读取的数据字节数
iBuffer:指向一个缓冲区,放置准备读取的数据
返回值
执行成功返回 1,失败返回 0
注解
iEepromID 所指定的型号可参考_EEPROM_TYPE
3.5.7 CH347WriteEEPROM
功能描述
该函数用于向 EEPROM 中写入数据块
函数定义
c
BOOL WINAPI
CH347WriteEEPROM( ULONG iIndex,
EEPROM_TYPE iEepromID,
ULONG iAddr,
ULONG iLength,
PUCHAR iBuffer )参数说明
iIndex:指定操作设备序号
iEepromID:指定 EEPROM 型号
iAddr:指定数据单元的地址
iLength:准备写出的数据字节数
iBuffer:指向一个缓冲区,放置准备写出的数据
返回值
执行成功返回 1,失败返回 0
注解
iEepromID 所指定的型号可参考_EEPROM_TYPE
四、异步串行接口函数
4.1 公共函数
4.1.1 接口动态插拔检测
检测 CH347 UART 接口动态插拔信息可通过 CH347Uart_SetDeviceNotify 函数来实现,代码可参考 3.2.6 接口动态插拔检测。
启用 CH347 UART 串口 USB 的插入和移除的监测:
CH347Uart_SetDeviceNotify(DevIndex, USBUartDevID, UsbDevPnpNotify);关闭 CH347 UART 串口 USB 的插入和移除的监测,在程序退出时一定要关闭。
CH347Uart_SetDeviceNotify(DevIndex, USBUartDevID, NULL);监视的 USBUartDevID 可为如下字符串或自行定义 ID 内容.
c
//MODE0 UART0
#define USBID_VCP_Mode0_UART0 "VID_1A86&PID_55DA&MI_00\0"
//MODE0 UART1
#define USBID_VCP_Mode0_UART1 "VID_1A86&PID_55DA&MI_01\0"
//MODE1 UART
#define USBID_VEN_Mode1_UART1 "VID_1A86&PID_55DB&MI_00\0"
//MODE2 UART
#define USBID_HID_Mode2_UART1 "VID_1A86&PID_55DB&MI_00\0"
//MODE3 UART
#define USBID_VEN_Mode3_UART1 "VID_1A86&PID_55DB&MI_00\0"4.1.2 设备枚举操作
在本接口库中,API 通过指定设备序号实现对应操作,设备序号是设备逐个插入的过程中,根据其插入顺序进行编号产生。实现设备枚举功能可以通过设备 Open 函数打开对应设备序号,根据函数返回值判断设备是否有效或存在。
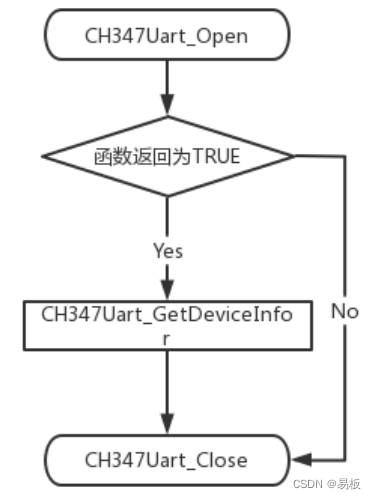
Figure 4.1.2 设备枚举操作流程图
4.2 HID/VCP UART 功能函数
4.2.1 操作流程
打开 设 备 后 , 使 用 CH347Uart_Open 函数 打 开 串 口 , 设 置 对 应 串 口 参 数 后 使 用CH347Uart_Init 函数进行串口设置,然后即可使用 CH347Uart_Write 或 CH347Uart_Read 函数实现串口数据收发。
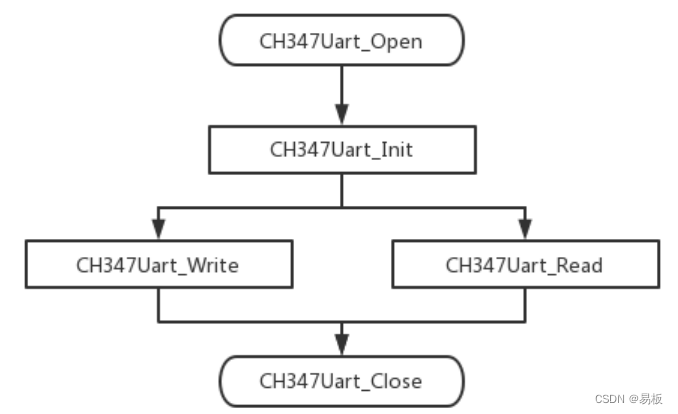
Figure 4.2.1 HID 串口操作流程图
函数具体说明请参考以下内容。
4.2.2 CH347Uart_Open
功能描述
该函数用于打开 CH347 串口
函数定义
c
HANDLE WINAPI
CH347Uart_Open(ULONG iIndex)参数说明
iIndex:指定操作设备序号
返回值
执行成功返回 1,失败返回 0
4.2.3 CH347Uart_Close
功能描述
该函数用于关闭 CH347 串口
函数定义
c
BOOL WINAPI
CH347Uart_Close(ULONG iIndex)参数说明
iIndex:指定操作设备序号
返回值
执行成功返回 1,失败返回 0
4.2.4 CH347Uart_SetDeviceNotify
功能描述
该函数用于设定设备时间通知程序,可用于 CH347 UART 的动态插拔检测
函数定义
c
BOOL WINAPI
CH347Uart_SetDeviceNotify( ULONG iIndex,
PCHAR iDeviceID,
mPCH347_NOTIFY_ROUTINE
iNotifyRoutine )参数说明
iIndex:指定操作设备序号
iDeviceID:可选参数,指向字符串,指定被监控的设备的 ID,字符串以\0 终止
iNotifyRoutine:指定设备事件回调程序,为 NULL 则取消事件通知,否则在检测到事件时调用该程序
返回值
执行成功返回 1,失败返回 0
4.2.5 CH347Uart_Init
功能描述
该函数用于初始化串口参数
函数定义
c
BOOL WINAPI
CH347Uart_Init( ULONG iIndex,
DWORD
BaudRate,
UCHAR ByteSize,
UCHAR
Parity,
UCHAR
StopBits,
UCHAR
ByteTimeout)参数说明
iIndex:指定操作设备序号
BaudRate,:设置的波特率数值
ByteSize:数据位(5、6、7、8、16)
Parity:校验位(0:None; 1:Odd; 2:Even; 3:Mark; 4:Space)
StopBits:停止位数(0:停止位; 1:.5 停止位; 2:停止位)
ByteTimeout: 字节超时时间,单位 100uS
返回值
执行成功返回 1,失败返回 0
4.2.6 CH347Uart_SetTimeout
功能描述
该函数用于设置 USB 数据读写的超时时间
函数定义
c
BOOL
WINAPI
CH347Uart_SetTimeout(ULONG
iIndex,
ULONG
iWriteTimeout,
ULONG
iReadTimeout )参数说明
iIndex:指定操作设备序号
iWriteTimeout: 指定 USB 写出数据块的超时时间。以毫秒 mS 为单位。
0xFFFFFFFF 指定不超时(默认值)
iReadTimeout: 指定 USB 读取数据块的超时时间。以毫秒 mS 为单位。
0xFFFFFFFF 指定不超时(默认值)
返回值
执行成功返回 1,失败返回 0
4.2.7 CH347Uart_Read
功能描述
该函数用于读取串口数据
函数定义
c
BOOL WINAPI
CH347Uart_Read( ULONG
iIndex,
PVOID
oBuffer,
PULONG
ioLength )参数说明
iIndex:指定操作设备序号
oBuffer:指向一个足够大的缓冲区,用于保存读取的数据
ioLength:指向长度单元,输入时为准备读取的长度,返回后为实际读取的长度
返回值
执行成功返回 1,失败返回 0
4.2.8 CH347Uart_Write
功能描述
该函数用于发送串口数据
函数定义
c
BOOL WINAPI
CH347Uart_Write(ULONG
iIndex,
PVOID
iBuffer,
PULONG ioLength )参数说明
iIndex:指定操作设备序号
iBuffer:指向一个缓冲区,放置准备写出的数据
ioLength:指向长度单元,输入时为准备写出的长度,返回后为实际写出的长度
返回值
执行成功返回 1,失败返回 0
4.2.9 CH347Uart_QueryBufUpload
功能描述
该函数用于查询缓冲区还有多少字节未取出
函数定义
c
BOOL WINAPI
CH347Uart_QueryBufUpload(ULONG iIndex,
LONGLONG
*RemainBytes);参数说明
iIndex:指定操作设备序号
RemainBytes: 返回当前缓冲区中未取出字节数量
返回值
执行成功返回 1,失败返回 0
4.3 GPIO 功能函数
4.3.1 操作流程
操作 GPIO 时可用 CH347OpenDevice/CH347Uart_Open 打开设备。
使用 CH347GPIO_Get 获取当前 GPIO 状态之后,根据操作需求使用 CH347GPIO_Set 设置GPIO 的输入输出状态。
实现 GPIO 控制和获取可调用 CH347GPIO_Set 和 CH347GPIO_Get 实现。
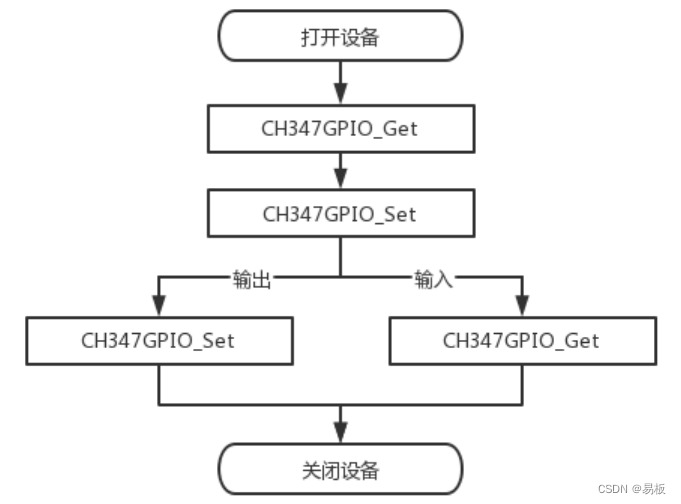
Figure 4.3.1 GPIO 操作流程图
函数具体说明请参考以下内容。
4.3.2 CH347GPIO_Get
功能描述
该函数用于获取设备当前的 GPIO 输入输出状态
函数定义
c
BOOL WINAPI
CH347GPIO_Get(ULONG iIndex,
UCHAR
*iDir,
UCHAR *iData)参数说明
iIndex:指定操作设备序号
iDir:引脚方向:GPIO0-7 对应位 0-7.0:输入;1:输出
iData:GPIO 电平状态:GPIO 0-7 对应位 0-7,其中 0 表示低电平,1 表示高电平
返回值
执行成功返回 1,失败返回 0
4.3.3 CH347GPIO_Set
功能描述
该函数用于设置 CH347-GPIO 的 I/O 方向与输出状态
函数定义
c
BOOL WINAPI
CH347GPIO_Set(ULONG iIndex,
UCHAR iEnable,
UCHAR iSetDirOut,
UCHAR
iSetDataOut)参数说明
iIndex:指定操作设备序号
iEnable:数据有效标志:对应位 0-7,对应 GPIO0-7
iSetDirOut:设置 I/O 方向,某位清 0 则对应引脚为输入,某位置 1 则对应引脚为输出。GPIO0-7 对应位 0-7
iSetDataOut: 输出数据,如果 I/O 方向为输出,那么某位清 0 时对应引脚输出低电平,某位置 1 时对应引脚输出高电平
返回值
执行成功返回 1,失败返回 0