这篇文章介绍arduino使用和安装arduino_bridge
将arduino与树莓派连接
查看arduino的端口号,我们这里查看到的时ttyUSB0
bash
ll /dev/ttyUSB*
将当前用户添加进dialout组
bash
sudo usermod -a -G dialout your_user_name然后重启树莓派,然后才能生效
然后如果你可以在列出的组中找到dialout,这就说明你已经加入到dialout中了
group

安装arduino
1.下载arduino ide安装包
官方下载链接:https://www.arduino.cc/en/Main/Software
2.使用tar命令对压缩包解压
bash
tar -xvf arduino-1.x.y-linux64.tar.xz3.将解压后的文件移动到/opt下
bash
sudo mv arduino-1.x.y /opt4.进入安装目录,对install.sh添加可执行权限,并执行安装
bash
cd /opt/arduino-1.x.y
sudo chmod +x install.sh
sudo ./install.sh5.启动并配置 Arduino IDE
在命令行直接输入:arduino,或者点击左下的显示应用程序搜索 arduino IDE。启动如下:
cpp
// 初始化函数
void setup() {
//将LED灯引脚(引脚值为13,被封装为了LED_BUTLIN)设置为输出模式
pinMode(LED_BUILTIN, OUTPUT);
}
// 循环执行函数
void loop() {
digitalWrite(LED_BUILTIN, HIGH); // 打开LED灯
delay(1000); // 休眠1000毫秒
digitalWrite(LED_BUILTIN, LOW); // 关闭LED灯
delay(1000); // 休眠1000毫秒
}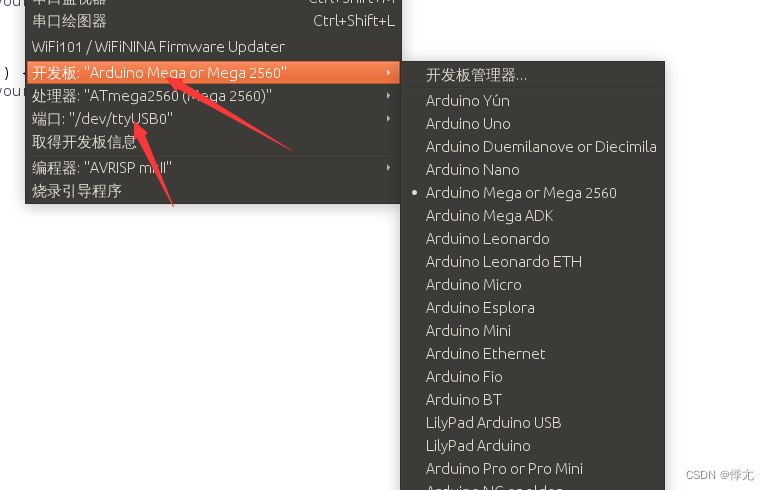
开发板选择Arduino mega,端口号选择/dev/ttyUSB0
上传该代码,观察arduino板载灯闪烁
到此arduino的安装就结束了
接下来安装ros_arduino_bridge
该功能包包含Arduino库和用来控制Arduino的ROS驱动包,它旨在成为在ROS下运行Arduino控制的机器人的完整解决方案。
其中当前主要关注的是:功能包集中一个兼容不同驱动的机器人的基本控制器(base controller),它可以接收ROS Twist类型的消息,可以发布里程计数据。上位机需要使用ROS(建议 melodic);
1.下载
新建ROS工作空间
bash
mkdir -p catkin_ws/src
cd catkin_ws
catkin_make进入ROS工作空间的src目录,输入命令:
bash
cd catkin_ws/src
git clone https://github.com/hbrobotics/ros_arduino_bridge.git2.ros_arduino_bridge 架构
文件结构说明在这里插入代码片 ├── ros_arduino_bridge # metapackage (元功能包)
│ ├── CMakeLists.txt
│ └── package.xml
├── ros_arduino_firmware #固件包,更新到Arduino
│ ├── CMakeLists.txt
│ ├── package.xml
│ └── src
│ └── libraries #库目录
│ ├── MegaRobogaiaPololu #针对Pololu电机控制器,MegaRobogaia编码器的头文件定义
│ │ ├── commands.h #定义命令头文件
│ │ ├── diff_controller.h #差分轮PID控制头文件
│ │ ├── MegaRobogaiaPololu.ino #PID实现文件
│ │ ├── sensors.h #传感器相关实现,超声波测距,Ping函数
│ │ └── servos.h #伺服器头文件
│ └── ROSArduinoBridge #Arduino相关库定义
│ ├── commands.h #定义命令
│ ├── diff_controller.h #差分轮PID控制头文件
│ ├── encoder_driver.h #编码器驱动头文件
│ ├── encoder_driver.ino #编码器驱动实现, 读取编码器数据,重置编码器等
│ ├── motor_driver.h #电机驱动头文件
│ ├── motor_driver.ino #电机驱动实现,初始化控制器,设置速度
│ ├── ROSArduinoBridge.ino #核心功能实现,程序入口
│ ├── sensors.h #传感器头文件及实现
│ ├── servos.h #伺服器头文件,定义插脚,类
│ └── servos.ino #伺服器实现
├── ros_arduino_msgs #消息定义包
│ ├── CMakeLists.txt
│ ├── msg #定义消息
│ │ ├── AnalogFloat.msg #定义模拟IO浮点消息
│ │ ├── Analog.msg #定义模拟IO数字消息
│ │ ├── ArduinoConstants.msg #定义常量消息
│ │ ├── Digital.msg #定义数字IO消息
│ │ └── SensorState.msg #定义传感器状态消息
│ ├── package.xml
│ └── srv #定义服务
│ ├── AnalogRead.srv #模拟IO输入
│ ├── AnalogWrite.srv #模拟IO输出
│ ├── DigitalRead.srv #数字IO输入
│ ├── DigitalSetDirection.srv #数字IO设置方向
│ ├── DigitalWrite.srv #数字IO输入
│ ├── ServoRead.srv #伺服电机输入
│ └── ServoWrite.srv #伺服电机输出
└── ros_arduino_python #ROS相关的Python包,用于上位机,树莓派等开发板或电脑等。
├── CMakeLists.txt
├── config #配置目录
│ └── arduino_params.yaml #定义相关参数,端口,rate,PID,sensors等默认参数。由arduino.launch调用
├── launch
│ └── arduino.launch #启动文件
├── nodes
│ └── arduino_node.py #python文件,实际处理节点,由arduino.launch调用,即可单独调用。
├── package.xml
├── setup.py
└── src #Python类包目录
└── ros_arduino_python
├── arduino_driver.py #Arduino驱动类
├── arduino_sensors.py #Arduino传感器类
├── base_controller.py #基本控制类,订阅cmd_vel话题,发布odom话题
└── init.py #类包默认空文件
上述目录结构虽然复杂,但是关注的只有两大部分:
ros_arduino_bridge/ros_arduino_firmware/src/libraries/ROSArduinoBridge
ros_arduino_bridge/ros_arduino_python/config/arduino_params.yaml
接下来我们对代码进行测试
1.串口命令
在主程序中,包含了 commands.h,该文件中包含了当前程序预定义的串口命令,可以编译程序并上传至 Arduino 电路板,然后打开串口监视器测试(当前程序并未修改,所以并非所有串口可用):
w 可以用于控制引脚电平
x 可以用于模拟输出
以LED灯控制为例,通过串口监视器录入命令:
w 13 0 == LED灯关闭
w 13 1 == LED灯打开
x 13 50 == LED灯PWM值为50
2.修改主程序入口,主要是添加
#define Tb6612_MOTOR_DRIVER
cpp
/*********************************************************************
* ROSArduinoBridge
控制差速驱动机器人的Arduino程序,允许通过一组简单的串行命令来控制机器人,并接收传感器和里程数据。
该程序默认配置假定使用Arduino Mega、Pololu电机控制器盾和Robogaia Mega编码器盾。
如果使用不同的电机控制器或编码器方法,可以编辑readEncoder()和setMotorSpeed()包装函数。
*********************************************************************/
//是否启用基座控制器
#define USE_BASE // Enable the base controller code
//#undef USE_BASE // Disable the base controller code
/* Define the motor controller and encoder library you are using */
启用基座控制器需要设置的电机驱动以及编码器驱
#ifdef USE_BASE
/* The Pololu VNH5019 dual motor driver shield */
//#define POLOLU_VNH5019
/* The Pololu MC33926 dual motor driver shield */
//#define POLOLU_MC33926
/* The RoboGaia encoder shield */
//#define ROBOGAIA
/* Encoders directly attached to Arduino board */
//#define ARDUINO_ENC_COUNTER
//1.添加自定义编码器驱动
#define ARDUINO_MY_COUNTER
/* L298 Motor driver*/
//#define L298_MOTOR_DRIVER
#define Tb6612_MOTOR_DRIVER
#endif
//是否启用舵机
//#define USE_SERVOS // Enable use of PWM servos as defined in servos.h
#undef USE_SERVOS // Disable use of PWM servos
//波特率
/* Serial port baud rate */
#define BAUDRATE 57600
//最大PWM值
/* Maximum PWM signal */
#define MAX_PWM 255
#if defined(ARDUINO) && ARDUINO >= 100
#include "Arduino.h"
#else
#include "WProgram.h"
#endif
/* Include definition of serial commands */
#include "commands.h"
/* Sensor functions */
#include "sensors.h"
/* Include servo support if required */
#ifdef USE_SERVOS
#include <Servo.h>
#include "servos.h"
#endif
//
#ifdef USE_BASE
/* Motor driver function definitions */
#include "motor_driver.h"
/* Encoder driver function definitions */
#include "encoder_driver.h"
/* PID parameters and functions */
#include "diff_controller.h"
/* Run the PID loop at 30 times per second */
#define PID_RATE 30 // Hz
/* Convert the rate into an interval */
const int PID_INTERVAL = 1000 / PID_RATE;
/* Track the next time we make a PID calculation */
unsigned long nextPID = PID_INTERVAL;
/* Stop the robot if it hasn't received a movement command
in this number of milliseconds */
#define AUTO_STOP_INTERVAL 2000
long lastMotorCommand = AUTO_STOP_INTERVAL;
#endif
/* Variable initialization */
// A pair of varibles to help parse serial commands (thanks Fergs)
int arg = 0;
int index = 0;
// Variable to hold an input character
char chr;
// Variable to hold the current single-character command
char cmd;
// Character arrays to hold the first and second arguments
char argv1[16];
char argv2[16];
// The arguments converted to integers
long arg1;
long arg2;
//重置命令
/* Clear the current command parameters */
void resetCommand() {
cmd = NULL;
memset(argv1, 0, sizeof(argv1));
memset(argv2, 0, sizeof(argv2));
arg1 = 0;
arg2 = 0;
arg = 0;
index = 0;
}
/* Run a command. Commands are defined in commands.h */
//执行串口命令
int runCommand() {
int i = 0;
char *p = argv1;
char *str;
int pid_args[4];
arg1 = atoi(argv1);
arg2 = atoi(argv2);
switch(cmd) {
case GET_BAUDRATE:
Serial.println(BAUDRATE);
break;
case ANALOG_READ:
Serial.println(analogRead(arg1));
break;
case DIGITAL_READ:
Serial.println(digitalRead(arg1));
break;
case ANALOG_WRITE:
analogWrite(arg1, arg2);
Serial.println("OK");
break;
case DIGITAL_WRITE:
if (arg2 == 0) digitalWrite(arg1, LOW);
else if (arg2 == 1) digitalWrite(arg1, HIGH);
Serial.println("OK");
break;
case PIN_MODE:
if (arg2 == 0) pinMode(arg1, INPUT);
else if (arg2 == 1) pinMode(arg1, OUTPUT);
Serial.println("OK");
break;
case PING:
Serial.println(Ping(arg1));
break;
#ifdef USE_SERVOS
case SERVO_WRITE:
servos[arg1].setTargetPosition(arg2);
Serial.println("OK");
break;
case SERVO_READ:
Serial.println(servos[arg1].getServo().read());
break;
#endif
#ifdef USE_BASE
case READ_ENCODERS:
Serial.print(readEncoder(LEFT));
Serial.print(" ");
Serial.println(readEncoder(RIGHT));
break;
case RESET_ENCODERS:
resetEncoders();
resetPID();
Serial.println("OK");
break;
case MOTOR_SPEEDS:
/* Reset the auto stop timer */
lastMotorCommand = millis();
// 如果参数 arg1 和 arg2 都为 0,则停止电机并重置 PID 控制器
if (arg1 == 0 && arg2 == 0) {
setMotorSpeeds(0, 0);// 停止电机
resetPID();
moving = 0; // 将 moving 标志设置为 0,表示没有运动
}
else moving = 1;//设置PID调试的目标值
// 设置左右电机的目标每帧 ticks(脉冲) 数
leftPID.TargetTicksPerFrame = arg1;
rightPID.TargetTicksPerFrame = arg2;
Serial.println("OK");
break;
case UPDATE_PID:
while ((str = strtok_r(p, ":", &p)) != '\0') {
pid_args[i] = atoi(str);
i++;
}
Kp = pid_args[0];
Kd = pid_args[1];
Ki = pid_args[2];
Ko = pid_args[3];
Serial.println("OK");
break;
#endif
default:
Serial.println("Invalid Command");
break;
}
}
/* Setup function--runs once at startup. */
void setup() {
Serial.begin(BAUDRATE);
// Initialize the motor controller if used */
#ifdef USE_BASE
#ifdef ARDUINO_ENC_COUNTER
//set as inputs
DDRD &= ~(1<<LEFT_ENC_PIN_A);
DDRD &= ~(1<<LEFT_ENC_PIN_B);
DDRC &= ~(1<<RIGHT_ENC_PIN_A);
DDRC &= ~(1<<RIGHT_ENC_PIN_B);
//enable pull up resistors
PORTD |= (1<<LEFT_ENC_PIN_A);
PORTD |= (1<<LEFT_ENC_PIN_B);
PORTC |= (1<<RIGHT_ENC_PIN_A);
PORTC |= (1<<RIGHT_ENC_PIN_B);
// tell pin change mask to listen to left encoder pins
PCMSK2 |= (1 << LEFT_ENC_PIN_A)|(1 << LEFT_ENC_PIN_B);
// tell pin change mask to listen to right encoder pins
PCMSK1 |= (1 << RIGHT_ENC_PIN_A)|(1 << RIGHT_ENC_PIN_B);
// enable PCINT1 and PCINT2 interrupt in the general interrupt mask
PCICR |= (1 << PCIE1) | (1 << PCIE2);
#elif defined ARDUINO_MY_COUNTER
initEncoders();
#endif
initMotorController();
resetPID();
#endif
/* Attach servos if used */
#ifdef USE_SERVOS
int i;
for (i = 0; i < N_SERVOS; i++) {
servos[i].initServo(
servoPins[i],
stepDelay[i],
servoInitPosition[i]);
}
#endif
}
/* Enter the main loop. Read and parse input from the serial port
and run any valid commands. Run a PID calculation at the target
interval and check for auto-stop conditions.
*/
void loop() {
while (Serial.available() > 0) {
// Read the next character
chr = Serial.read();
// Terminate a command with a CR
if (chr == 13) {
if (arg == 1) argv1[index] = NULL;
else if (arg == 2) argv2[index] = NULL;
runCommand();
resetCommand();
}
// Use spaces to delimit parts of the command
else if (chr == ' ') {
// Step through the arguments
if (arg == 0) arg = 1;
else if (arg == 1) {
argv1[index] = NULL;
arg = 2;
index = 0;
}
continue;
}
else {
if (arg == 0) {
// The first arg is the single-letter command
cmd = chr;
}
else if (arg == 1) {
// Subsequent arguments can be more than one character
argv1[index] = chr;
index++;
}
else if (arg == 2) {
argv2[index] = chr;
index++;
}
}
}
// If we are using base control, run a PID calculation at the appropriate intervals
#ifdef USE_BASE
if (millis() > nextPID) {
updatePID();//更新 PID 控制器
nextPID += PID_INTERVAL;
}
// Check to see if we have exceeded the auto-stop interval
if ((millis() - lastMotorCommand) > AUTO_STOP_INTERVAL) {;
setMotorSpeeds(0, 0);
moving = 0;
}
#endif
// Sweep servos
#ifdef USE_SERVOS
int i;
for (i = 0; i < N_SERVOS; i++) {
servos[i].doSweep();
}
#endif
}2.encoder_driver文件修改
cpp
/* *************************************************************
Encoder definitions
Add an "#ifdef" block to this file to include support for
a particular encoder board or library. Then add the appropriate
#define near the top of the main ROSArduinoBridge.ino file.
************************************************************ */
#ifdef USE_BASE
#ifdef ROBOGAIA
/* The Robogaia Mega Encoder shield */
#include "MegaEncoderCounter.h"
/* Create the encoder shield object */
MegaEncoderCounter encoders = MegaEncoderCounter(4); // Initializes the Mega Encoder Counter in the 4X Count mode
/* Wrap the encoder reading function */
long readEncoder(int i) {
if (i == LEFT) return encoders.YAxisGetCount();
else return encoders.XAxisGetCount();
}
/* Wrap the encoder reset function */
void resetEncoder(int i) {
if (i == LEFT) return encoders.YAxisReset();
else return encoders.XAxisReset();
}
#elif defined(ARDUINO_ENC_COUNTER)
volatile long left_enc_pos = 0L;
volatile long right_enc_pos = 0L;
static const int8_t ENC_STATES [] = {0,1,-1,0,-1,0,0,1,1,0,0,-1,0,-1,1,0}; //encoder lookup table
/* Interrupt routine for LEFT encoder, taking care of actual counting */
ISR (PCINT2_vect){
static uint8_t enc_last=0;
enc_last <<=2; //shift previous state two places
enc_last |= (PIND & (3 << 2)) >> 2; //read the current state into lowest 2 bits
left_enc_pos += ENC_STATES[(enc_last & 0x0f)];
}
/* Interrupt routine for RIGHT encoder, taking care of actual counting */
ISR (PCINT1_vect){
static uint8_t enc_last=0;
enc_last <<=2; //shift previous state two places
enc_last |= (PINC & (3 << 4)) >> 4; //read the current state into lowest 2 bits
right_enc_pos += ENC_STATES[(enc_last & 0x0f)];
}
/* Wrap the encoder reading function */
long readEncoder(int i) {
if (i == LEFT) return left_enc_pos;
else return right_enc_pos;
}
/* Wrap the encoder reset function */
void resetEncoder(int i) {
if (i == LEFT){
left_enc_pos=0L;
return;
} else {
right_enc_pos=0L;
return;
}
}
#elif defined ARDUINO_MY_COUNTER
//功能:实现左右电机的脉冲计数
//1.定义计数器
volatile long left_count = 0L;
volatile long right_count = 0L;
//2.初始化
void initEncoders(){
pinMode(LEFT_A,INPUT); // 21 --- 2
pinMode(LEFT_B,INPUT); // 20 --- 3
pinMode(RIGHT_A,INPUT);// 18 --- 5
pinMode(RIGHT_B,INPUT);// 19 --- 4
attachInterrupt(2,leftEncoderEventA,CHANGE);
attachInterrupt(3,leftEncoderEventB,CHANGE);
attachInterrupt(5,rightEncoderEventA,CHANGE);
attachInterrupt(4,rightEncoderEventB,CHANGE);
}
//3.编写中断的回调函数
void leftEncoderEventA(){
if(digitalRead(LEFT_A) == HIGH){
if(digitalRead(LEFT_B) == HIGH){
left_count++;
} else {
left_count--;
}
} else {
if(digitalRead(LEFT_B) == LOW){
left_count++;
} else {
left_count--;
}
}
}
void leftEncoderEventB(){
if(digitalRead(LEFT_B) == HIGH){
if(digitalRead(LEFT_A) == LOW){
left_count++;
} else {
left_count--;
}
} else {
if(digitalRead(LEFT_A) == HIGH){
left_count++;
} else {
left_count--;
}
}
}
void rightEncoderEventA(){
if(digitalRead(RIGHT_A) == HIGH){
if(digitalRead(RIGHT_B) == HIGH){
right_count++;
} else {
right_count--;
}
} else {
if(digitalRead(RIGHT_B) == LOW){
right_count++;
} else {
right_count--;
}
}
}
void rightEncoderEventB(){
if(digitalRead(RIGHT_B) == HIGH){
if(digitalRead(RIGHT_A) == LOW){
right_count++;
} else {
right_count--;
}
} else {
if(digitalRead(RIGHT_A) == HIGH){
right_count++;
} else {
right_count--;
}
}
}
//4.实现编码器数据读和重置的函数
//i取值是LEFT或者RIGHT,是左右轮的标记
long readEncoder(int i){
if (i == LEFT) return left_count;
else return right_count;
}
void resetEncoder(int i) {
if (i == LEFT){
left_count=0L;
return;
} else {
right_count=0L;
return;
}
}
#else
#error A encoder driver must be selected!
#endif
/* Wrap the encoder reset function */
void resetEncoders() {
resetEncoder(LEFT);
resetEncoder(RIGHT);
}
#endif3.motor_driver.h文件修改
cpp
/***************************************************************
Motor driver function definitions - by James Nugen
*************************************************************/
#ifdef L298_MOTOR_DRIVER
#define RIGHT_MOTOR_BACKWARD 5
#define LEFT_MOTOR_BACKWARD 6
#define RIGHT_MOTOR_FORWARD 9
#define LEFT_MOTOR_FORWARD 10
#define RIGHT_MOTOR_ENABLE 12
#define LEFT_MOTOR_ENABLE 13
#elif defined Tb6612_MOTOR_DRIVER
//HL正转,LH反转
#define AIN1 9
#define AIN2 8
#define PWMA 3
#define STBY 10
//第二个电机,待测
#define BIN1 7
#define BIN2 6
#define PWMB 5
#endif
void initMotorController();//初始化电机控制
void setMotorSpeed(int i, int spd);//设置单个电机转速
void setMotorSpeeds(int leftSpeed, int rightSpeed);//设置多个电机转速4.motor_driver文件修改
cpp
/***************************************************************
Motor driver definitions
Add a "#elif defined" block to this file to include support
for a particular motor driver. Then add the appropriate
#define near the top of the main ROSArduinoBridge.ino file.
*************************************************************/
#ifdef USE_BASE
#ifdef POLOLU_VNH5019
/* Include the Pololu library */
#include "DualVNH5019MotorShield.h"
/* Create the motor driver object */
DualVNH5019MotorShield drive;
/* Wrap the motor driver initialization */
void initMotorController() {
drive.init();
}
/* Wrap the drive motor set speed function */
void setMotorSpeed(int i, int spd) {
if (i == LEFT) drive.setM1Speed(spd);
else drive.setM2Speed(spd);
}
// A convenience function for setting both motor speeds
void setMotorSpeeds(int leftSpeed, int rightSpeed) {
setMotorSpeed(LEFT, leftSpeed);
setMotorSpeed(RIGHT, rightSpeed);
}
#elif defined POLOLU_MC33926
/* Include the Pololu library */
#include "DualMC33926MotorShield.h"
/* Create the motor driver object */
DualMC33926MotorShield drive;
/* Wrap the motor driver initialization */
void initMotorController() {
drive.init();
}
/* Wrap the drive motor set speed function */
void setMotorSpeed(int i, int spd) {
if (i == LEFT) drive.setM1Speed(spd);
else drive.setM2Speed(spd);
}
// A convenience function for setting both motor speeds
void setMotorSpeeds(int leftSpeed, int rightSpeed) {
setMotorSpeed(LEFT, leftSpeed);
setMotorSpeed(RIGHT, rightSpeed);
}
#elif defined L298_MOTOR_DRIVER
void initMotorController() {
digitalWrite(RIGHT_MOTOR_ENABLE, HIGH);
digitalWrite(LEFT_MOTOR_ENABLE, HIGH);
}
void setMotorSpeed(int i, int spd) {
unsigned char reverse = 0;
if (spd < 0)
{
spd = -spd;
reverse = 1;
}
if (spd > 150)
spd = ;
if (i == LEFT) {
if (reverse == 0) { analogWrite(RIGHT_MOTOR_FORWARD, spd); analogWrite(RIGHT_MOTOR_BACKWARD, 0); }
else if (reverse == 1) { analogWrite(RIGHT_MOTOR_BACKWARD, spd); analogWrite(RIGHT_MOTOR_FORWARD, 0); }
}
else /*if (i == RIGHT) //no need for condition*/ {
if (reverse == 0) { analogWrite(LEFT_MOTOR_FORWARD, spd); analogWrite(LEFT_MOTOR_BACKWARD, 0); }
else if (reverse == 1) { analogWrite(LEFT_MOTOR_BACKWARD, spd); analogWrite(LEFT_MOTOR_FORWARD, 0); }
}
}
void setMotorSpeeds(int leftSpeed, int rightSpeed) {
setMotorSpeed(LEFT, leftSpeed);
setMotorSpeed(RIGHT, rightSpeed);
}
#elif defined Tb6612_MOTOR_DRIVER
//1.初始化
void initMotorController(){
pinMode(AIN1,OUTPUT);
pinMode(AIN2,OUTPUT);
pinMode(PWMA,OUTPUT);
pinMode(STBY,OUTPUT);
pinMode(BIN1,OUTPUT);
pinMode(BIN2,OUTPUT);
pinMode(PWMB,OUTPUT);
}
//2.设置单电机转速
void setMotorSpeed(int i, int spd){
unsigned char reverse = 0;
// 如果速度小于0,则取反并设置反转标志
if (spd < 0)
{
spd = -spd;
reverse = 1;
}
// 将速度限制在0-255之间
if (spd > 150)
spd = 150;
//tiaoshi
if (i == LEFT) {
digitalWrite(STBY, HIGH); // 启用电机驱动器
if (reverse == 0) { //左电机
digitalWrite(AIN1, LOW);//正转
digitalWrite(AIN2, HIGH);
} else if (reverse == 1) {
digitalWrite(AIN1, HIGH);//反转
digitalWrite(AIN2, LOW);
}
analogWrite(PWMA,spd);// 设置电机速度
} else if (i == RIGHT){ // 右电机
digitalWrite(STBY, HIGH);
if (reverse == 0) { // 正转
digitalWrite(BIN1, LOW); // 设置电机反转
digitalWrite(BIN2, HIGH);
} else if (reverse ==1) { // 反转
digitalWrite(BIN1, HIGH); // 设置电机正转
digitalWrite(BIN2, LOW);
}
analogWrite(PWMB, spd); // 设置电机速度
}
}
//3.设置两个电机转速
void setMotorSpeeds(int leftSpeed, int rightSpeed){
setMotorSpeed(LEFT, leftSpeed);
setMotorSpeed(RIGHT, rightSpeed);
}
#else
#error A motor driver must be selected!
#endif
#endif5.diff_controller文件修改
cpp
/* Functions and type-defs for PID control.
Taken mostly from Mike Ferguson's ArbotiX code which lives at:
http://vanadium-ros-pkg.googlecode.com/svn/trunk/arbotix/
*/
/* PID setpoint info For a Motor */
typedef struct {
double TargetTicksPerFrame; // target speed in ticks per frame
long Encoder; // encoder count
long PrevEnc; // last encoder count
/*
* Using previous input (PrevInput) instead of PrevError to avoid derivative kick,
* see http://brettbeauregard.com/blog/2011/04/improving-the-beginner%E2%80%99s-pid-derivative-kick/
*/
int PrevInput; // last input
//int PrevErr; // last error
/*
* Using integrated term (ITerm) instead of integrated error (Ierror),
* to allow tuning changes,
* see http://brettbeauregard.com/blog/2011/04/improving-the-beginner%E2%80%99s-pid-tuning-changes/
*/
//int Ierror;
int ITerm; //integrated term
long output; // last motor setting
}
SetPointInfo;
SetPointInfo leftPID, rightPID;
/* PID Parameters */
float Kp = 1.5;
float Kd = 3.0;
float Ki = 0.1;
int Ko = 50;
unsigned char moving = 0; // is the base in motion?
/*
* Initialize PID variables to zero to prevent startup spikes
* when turning PID on to start moving
* In particular, assign both Encoder and PrevEnc the current encoder value
* See http://brettbeauregard.com/blog/2011/04/improving-the-beginner%E2%80%99s-pid-initialization/
* Note that the assumption here is that PID is only turned on
* when going from stop to moving, that's why we can init everything on zero.
*/
void resetPID(){
leftPID.TargetTicksPerFrame = 0.0;
leftPID.Encoder = readEncoder(LEFT);
leftPID.PrevEnc = leftPID.Encoder;
leftPID.output = 0;
leftPID.PrevInput = 0;
leftPID.ITerm = 0;
rightPID.TargetTicksPerFrame = 0.0;
rightPID.Encoder = readEncoder(RIGHT);
rightPID.PrevEnc = rightPID.Encoder;
rightPID.output = 0;
rightPID.PrevInput = 0;
rightPID.ITerm = 0;
}
/* PID routine to compute the next motor commands */
void doPID(SetPointInfo * p) {
long Perror;
long output;
int input;
//Perror = p->TargetTicksPerFrame - (p->Encoder - p->PrevEnc);
input = p->Encoder - p->PrevEnc;
Perror = p->TargetTicksPerFrame - input;
//Serial.println(input);
/*
* Avoid derivative kick and allow tuning changes,
* see http://brettbeauregard.com/blog/2011/04/improving-the-beginner%E2%80%99s-pid-derivative-kick/
* see http://brettbeauregard.com/blog/2011/04/improving-the-beginner%E2%80%99s-pid-tuning-changes/
*/
//output = (Kp * Perror + Kd * (Perror - p->PrevErr) + Ki * p->Ierror) / Ko;
// p->PrevErr = Perror;
output = (Kp * Perror - Kd * (input - p->PrevInput) + p->ITerm) / Ko;
p->PrevEnc = p->Encoder;
output += p->output;
// Accumulate Integral error *or* Limit output.
// Stop accumulating when output saturates
if (output >= MAX_PWM)
output = MAX_PWM;
else if (output <= -MAX_PWM)
output = -MAX_PWM;
else
/*
* allow turning changes, see http://brettbeauregard.com/blog/2011/04/improving-the-beginner%E2%80%99s-pid-tuning-changes/
*/
p->ITerm += Ki * Perror;
p->output = output;
p->PrevInput = input;
}
/* Read the encoder values and call the PID routine */
void updatePID() {
/* Read the encoders */
leftPID.Encoder = readEncoder(LEFT);
rightPID.Encoder = readEncoder(RIGHT);
/* If we're not moving there is nothing more to do */
if (!moving){
/*
* Reset PIDs once, to prevent startup spikes,
* see http://brettbeauregard.com/blog/2011/04/improving-the-beginner%E2%80%99s-pid-initialization/
* PrevInput is considered a good proxy to detect
* whether reset has already happened
*/
if (leftPID.PrevInput != 0 || rightPID.PrevInput != 0) resetPID();
return;
}
/* Compute PID update for each motor */
//分别调试左右轮
doPID(&rightPID);
doPID(&leftPID);
/* Set the motor speeds accordingly */
setMotorSpeeds(leftPID.output, rightPID.output);
}修改完上述文件后,上传代码进行测试
打开串口监视器,然后输入命令,命令格式为: m num1 num2,num1和num2分别为单位时间内左右电机各自转动的编码器计数,而默认单位时间为 1/30 秒。
观察电机转动情况