文章目录
前言
关于CRC校验的基本理论、算法实现网上已经有很多介绍文章,本文不再赘述。只是记录在项目测试中真正开发CRC算法并进行测试的一些体会。
一、为什么CAN报文有CRC?
首先从CAN帧结构层面上看,在报文Data后紧跟着的是CRC场,通信收发双方通过约定的算法进行CRC计算来实现数据传输检错功能,以此降低误码率,保证数据传输的正确性和完整性。从应用层面来看车辆的车速档位、Usermode、Carmode等信息需要保证正确传输以达到数据安全。这也是为什么不是所有帧都需要做CRC校验。
二、怎么确定是否需要做CRC校验?
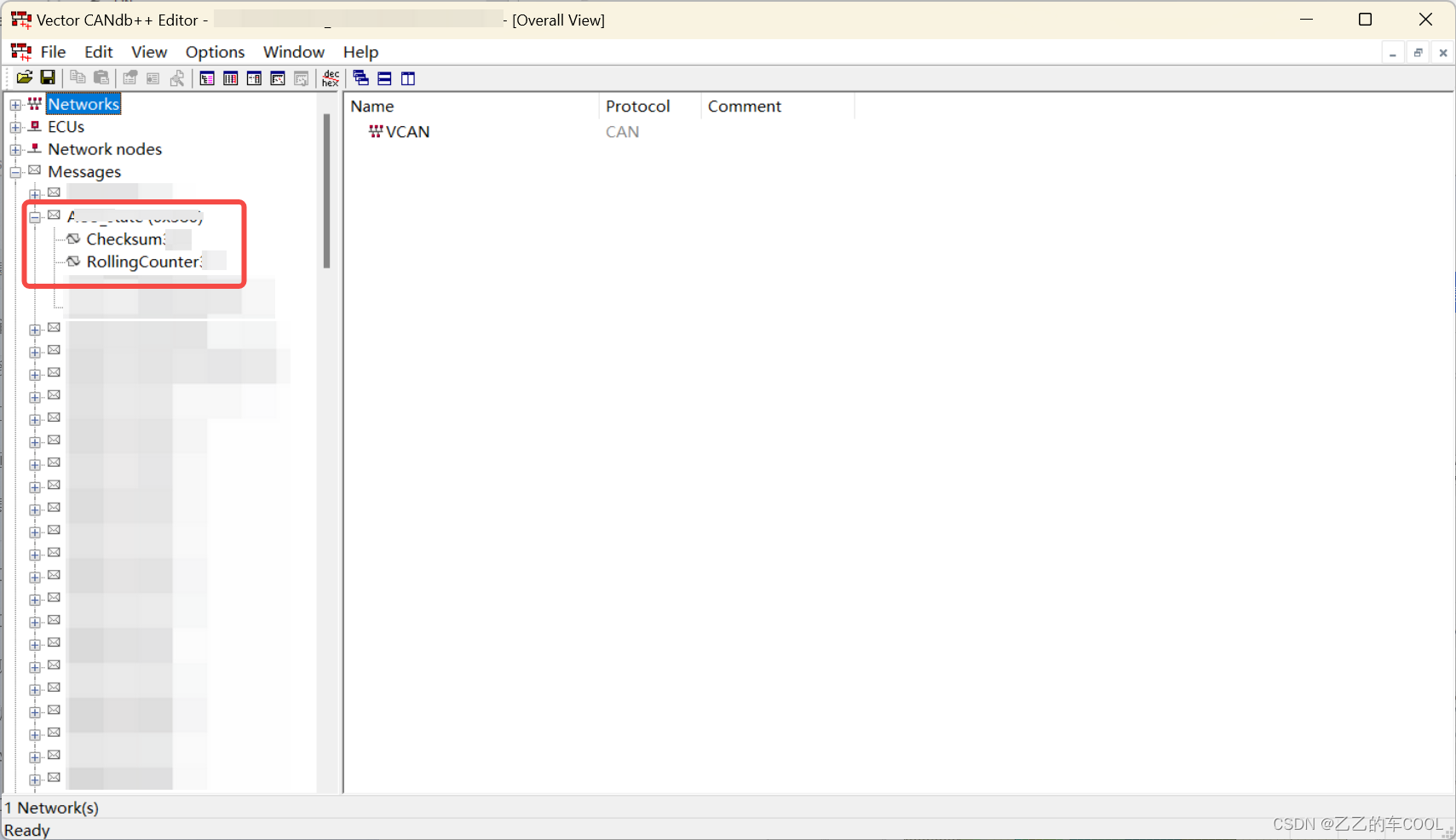
如下图,在DBC或者ARXML中当需要仿真发送的报文中包括checksum和Rollingcounter信号时,就需要进行CRC校验算法开发。这里有几个点需要注意:
- 仿真发送的报文才需要,接收报文不需要;
- checksum和Rollingcounter信号名不一定是唯一的,要注意识别。有的可能写CRC、RC等其他形式。当仿真发送报文没有任何作用时,就可以去看看是不是有CRC信号需要算法校验。
- CRC算法也是多样的,注意根据规范开发。核心数据包括:多项式、初始CRC值、最终异或值。重点是理解CRC算法逻辑,这样不论是在CANoe、TSMaster、Veristand中都可以进行开发。
三、CAPL代码实现CRC算法
上面提到,重点是理解CRC算法逻辑然后去有针对性的开发。下面以LIN的CRC为例,使用CAPL进行CRC demo代码的实现。可以根据实际开发需要进行调整。
c
/*@!Encoding:936*/
includes
{
}
variables
{
byte i;
linFrame *msg;
int flag;
byte index;
byte crc_item;
byte CRC_CheckSum;
byte crcValue = 0x00;
byte xorValue = 0x00;
byte Frame_Data[7];
}
void SimulationCRC(long MsgID,int CycleTime)
{
msg.id = 0x00;
msg.msgChannel = 1;
msg.dlc=8;
msg.rtr = 0; //RTR在output发送帧时使用,为0将重新配置响应数据;为1向总线发送帧头,配合主模式使用
msg.byte(1) = i + 0x80;
flag = 1;
i++;
if(i == 0xF)
{
i = 0x0;
}
//直接定义byte字节值;或者去定义报文信号
msg.byte(2) = 0x02;
msg.byte(3) = 0x03;
msg.byte(4) = 0x04;
msg.byte(5) = 0x05;
msg.byte(6) = 0xC6;
msg.byte(7) = 0x07;
Frame_Data[0] = msg.byte(1);
Frame_Data[1] = msg.byte(2);
Frame_Data[2] = msg.byte(3);
Frame_Data[3] = msg.byte(4);
Frame_Data[4] = msg.byte(5);
Frame_Data[5] = msg.byte(6);
Frame_Data[6] = msg.byte(7);
if(flag == 1)
{
CRC_CheckSum = crc8Sumu(Frame_Data,7);
flag = 0;
}
msg.byte(0) = CRC_CheckSum;
output(msg);
flag=1;
}
on linFrame *
{
if(this.id == 0x00)
{
SimulationCRC(0x00, 50);
}
}
// ----------------------<crc8Sumu>-------------------------
byte crc8Sumu(byte data[], int Datalen)
{
byte CRCInitValue = 0x01;
byte CRCPolynomial = 0x02;
byte CRCXORValue = 0x03;
int i, j;
byte Rtn;
Rtn = CRCInitValue;
for (i = 0; i < Datalen; i++)
{
Rtn ^= data[i]; //异或赋值
for (j = 0; j < 8; j++)
{
if (Rtn & 0x80)
{
Rtn = (Rtn << 1) ^ CRCPolynomial; //左移一位后 异或运算
}
else
{
Rtn <<= 1;
}
}
}
Rtn ^= CRCXORValue;
return Rtn;
}