编辑:ll
KBL410-ASEMI智能AI专用整流桥KBL410
型号:KBL410
品牌:ASEMI
封装:KBL-4
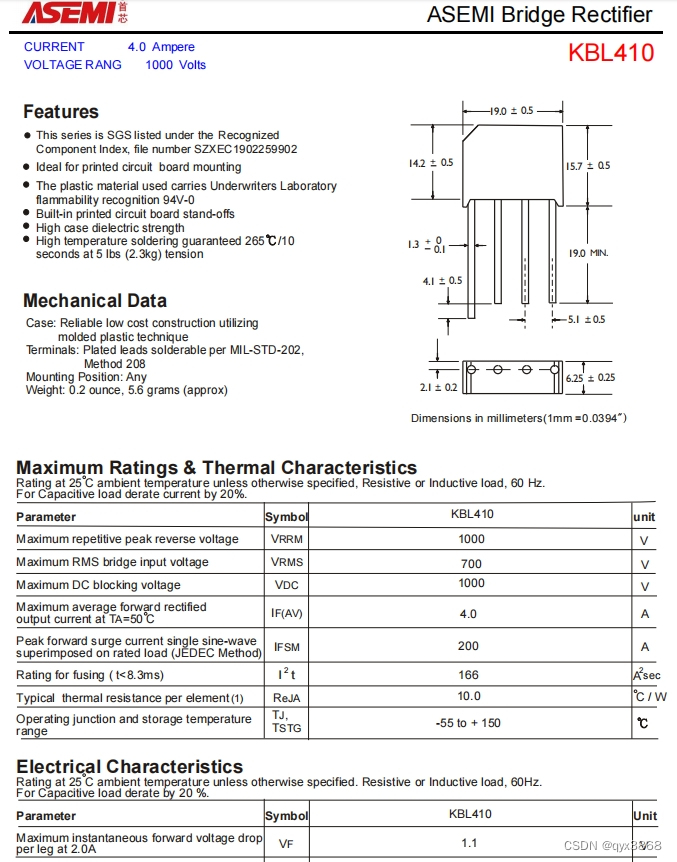
正向电流(Id):4A
反向耐压(VRRM):1000V
正向浪涌电流:200A
正向电压(VF):1.10V
引脚数量:4
芯片个数:4
芯片尺寸:72MIL
功率(Pd):中小率设备
工作温度:-55°C~150°C
类型:整流扁桥、插件整流桥
应用领域
工业电源
电焊机
工业自动化设备
变频器
充电桩
KBL410整流桥描述:
ASEMI品牌KBL410是采用工艺芯片,该芯片具有良好的稳定性及抗冲击能力,能够持续保证了KBL410的平均正向整流电流4A,反向击穿电压1000V.