题目
证明

的MAP估计量为

其中 是一个的矢量,
是一个的矢量, 是一个可逆的p*p的矩阵。也就是说,MAP估计量对可逆的线性变换是可以变换的。
是一个可逆的p*p的矩阵。也就是说,MAP估计量对可逆的线性变换是可以变换的。
解答
已知 的联合概率密度
的联合概率密度

且:

现在知道:

那么为了获得变换后 的MAP,首先需要根据
的MAP,首先需要根据 求出
求出
根据概率密度变换的基本知识:
(具体可以参考:随机过程------随机变量的函数变换(换元)_连续型分布函数的变换-CSDN博客)
又因为 是可逆的,可以得到:
是可逆的,可以得到:

因此:
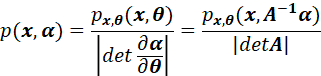
注意,上式本质上是雅可比行列式变换。由于 不包含
不包含 。因此,如果寻找不同
。因此,如果寻找不同 下
下 的最大值,等同于寻找不同
的最大值,等同于寻找不同 下
下 的最大值。而又根据
的最大值。而又根据 的最大值出现在
的最大值出现在 处,那么根据线性关系,就可以得到此时的
处,那么根据线性关系,就可以得到此时的 就是
就是 达到最大值对应的
达到最大值对应的 ,即:
,即:

最后,再利用两个估计量的线性关系,得到:

也就是MAP估计量(此例中的 )对可逆的线性变换(此例中的
)对可逆的线性变换(此例中的 ),直接可以得到变换后新参数的MAP估计量(此例中的
),直接可以得到变换后新参数的MAP估计量(此例中的 )
)
注意MMSE估计量也有一样的线性性质,参见书(11.5)公式