在学习ros2的过程中,当学习到话题通信-自定义接口消息时,当消息的具体类型并未指定时,常见的操作是在base_interfaces_demo下创建msg文件夹及文件。同理,在动作通信等其他类型的通信中也需要这么做,只是创建的文件夹的名字不同,可能是action等。
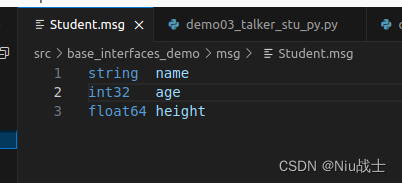
当文件夹,文件内部都已经编写完毕后,这里编写了一个Student.msg然后写了String类型的name,int32类型的age,float64类型的height用以交互,当在客户端及用户端编写代码时却发现,使用from base_interfaces_demo.msg import Student时无代码补全。
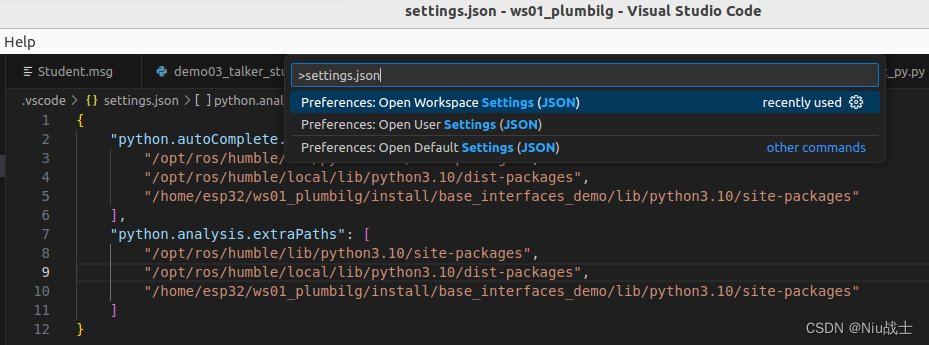
起初我不认为这是很大的问题,但随着消息类型的增多,我写的代码总是会在这部分写错,同时在编写代码时还需要对照着.msg,.action文件来写,十分不方便,于是我查找了有关的方法。其中一个方法是:Python文件中导入自定义消息相关的包时,为了方便使用,可以配置VSCode中settings.json文件,在文件中的python.autoComplete.extraPaths和python.analysis.extraPaths属性下添加一行:"$(workspaceFolder;/install/base interfaces _demo/local/lib/python3.10/dist-packages"添加完毕后,代码可以高亮显示且可以自动补齐,其他接口文件或接口包的使用也与此同理。
但我在使用colcon build --packages-select base_interfaces_demo后压根就没有产生Python的local文件夹,但是想来肯定是编译了Python版本的,于是查找后发现了解决方案。
首先,在编辑settings.json时要选择Workspace Settings,最初由于并未告知我选哪个,我选择的User Settings,改变后并未产生效果。其次,若使用命令后没有local文件夹编译出现,可以选择文件夹下的lib文件夹下的python3.10下的site-packages。其实也很好理解,既然没给dist-packages,总要找一个替代,且VScode在上方给的部分初始setting中也有这样选择site-paskages的情况出现。这样问题就解决了。