当STM32的GPIO口设置为复用功能输入模式 时,你仍然可以使用标准的GPIO库函数(如 GPIO_ReadInputDataBit())来读取该引脚的实际电平状态。
1. 为什么可以读取?
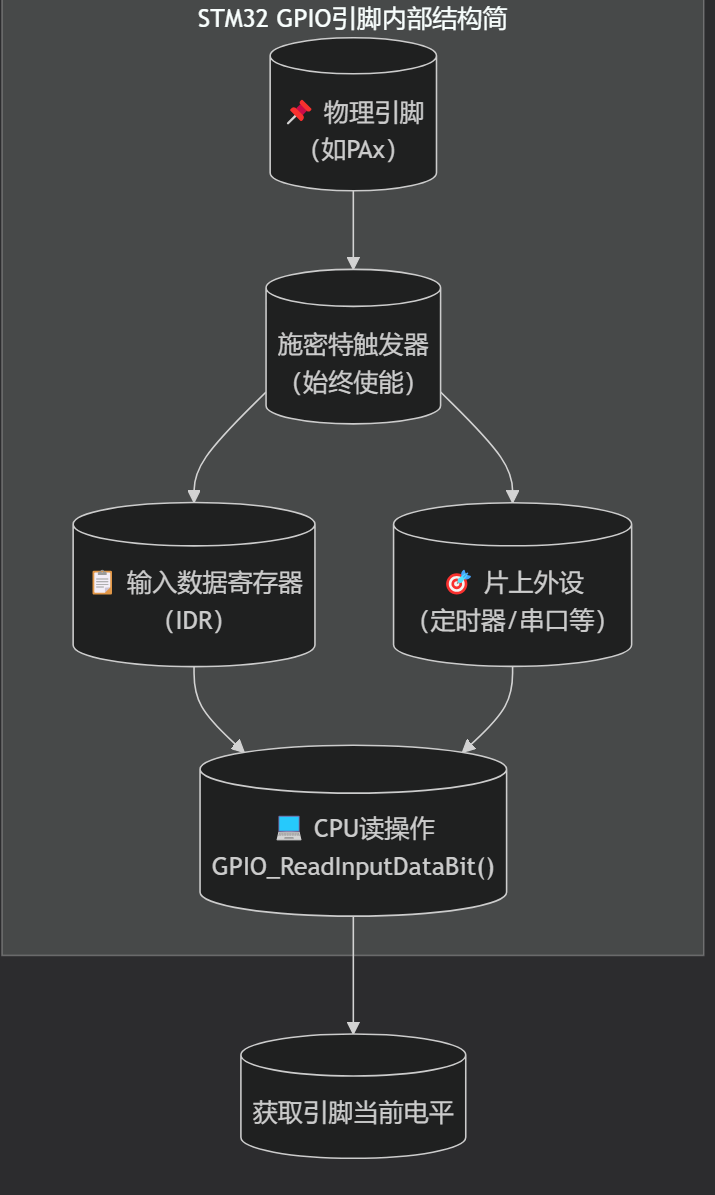
这是因为在STM32的内部硬件设计上,输入路径是共享的。请看下图:
从图中可以看出关键点:
-
施密特触发器始终使能 :在复用功能输入模式下,GPIO引脚的施密特触发器是打开的。外部信号通过引脚进入后,同时流向两个地方。
-
信号分流:
-
流向片上外设:信号进入定时器的输入捕获通道,用于霍尔传感器采集、电机换相等硬件自动处理。
-
流向输入数据寄存器 :信号同时也被存储到GPIO的输入数据寄存器(GPIOx_IDR) 中。
-
-
CPU读取 :当你调用
GPIO_ReadInputDataBit()时,CPU实际上就是在读取这个 IDR寄存器 的值。因此,只要触发器是使能的,读取到的就是引脚当前的实时电平。
2. 实际应用场景
在霍尔传感器采集的电机控制应用中,这个特性有时会派上用场:
-
调试与监控:在电机运行时,可以通过在主循环中或断点处读取GPIO状态,来验证霍尔传感器是否工作正常,信号是否正确。
-
**低速辅助控制:**在电机启动或极低速情况下,定时器捕获的时间间隔可能很长,此时可以通过直接读取GPIO状态来获取一个绝对的位置参考。
3. 注意事项
-
区分输入与输出 :如果你的引脚配置的是复用功能输出模式(如PWM输出),虽然也可以读取IDR,但此时读取到的是引脚正在输出的电平,不一定是外部驱动的电平。
-
模拟模式例外 :**只有模拟输入模式下,施密特触发器才会被强制关闭,**此时无法用GPIO函数读取数字电平。
总结一下:在霍尔传感器这种复用功能输入的应用中,你既能享受硬件自动捕获的高效,也能在需要时用软件读取引脚状态,两者互不冲突。