TFD式样那智机器人离线程序通过Process Simulation、DELMIA等仿真软件为载体给机器人出离线,下载下来的文本程序,现场机器人一般是无法导入及识别出来的。那么就需要TFD on Desk TFD控制器来进行转换,才能导入现场机器人读取程序。
导入的文本程序要求格式为
注:以下绿色背景内字为程序文本格式,#号内为格式注释
// NACHI TFD
// JOINT VALUES
(此处空一行)
P1=(xx,xx,xx,xx,xx,xx, xx)#xx此处代表轴旋转角度值#
P2=(xx,xx,xx,xx,xx,xx, xx)#此格式有7个轴位的轴值(可从对应型号的机器人示教器看出是几个轴)#
P3=(xx,xx,xx,xx,xx,xx, xx)#通常有7/8个轴数,轴数必须对应上,以及轴值不能超#
P4=(xx,xx,xx,xx,xx,xx, xx)#导入的轴数轴值如果对不上则会报错,通常是轴数不对,改对即可导入#
P5=(xx,xx,xx,xx,xx,xx, xx)
(此处空一行)
// PROGRAM.
JOINT, P1,9,2,0,1#有多少个示教点位P几,就有多少个JOINT,P几的行数#
JOINT, P2,9,2,0,1
JOINT, P3,9,2,0,1
JOINT, P4,9,2,0,1
JOINT, P5,9,2,0,1
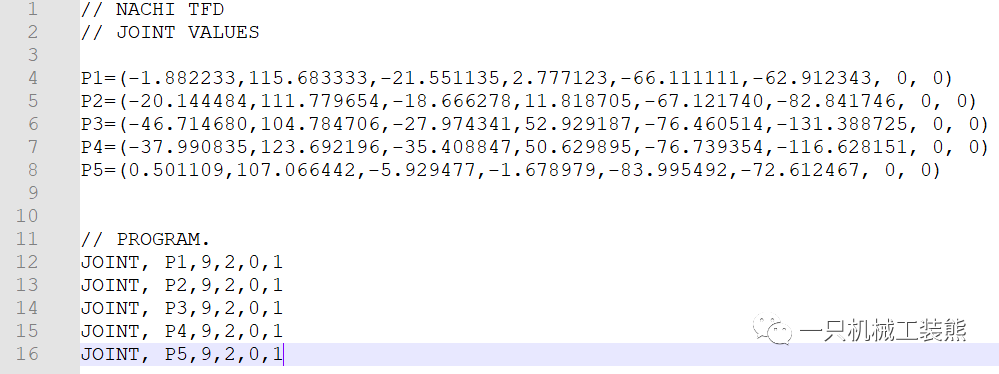
范图:
转换简易教程如下:
TFD那智机器人仿真离线程序文本转换为现场机器人程序
最终转换出来的程序存放在C:\TFD_ONDESK\NRA2011\WORK\APROGRAM中。
软件安装包:TFD on Desk 安装包
++如果此分享对你有帮助,欢迎点赞在看分享朋友圈,想要获得更多有用信息,请关注我!++